静力水准自动化监测系统在三峡升船机工程的应用
2015-11-28 03:06余剑锋
山西电子技术 2015年3期
余剑锋
(中国地震局地震研究所(地震大地测量重点实验室),湖北 武汉 430071)
举世瞩目的长江三峡工程建成后,一方面,因上游形成水库后的回水将到达四川省万县市,大大改善了上游航运条件。另一方面,则因大坝截断了长江江面,不仅阻断了航道,更使得大坝上下游形成了最大113 m 水位落差。为解决船舶过坝的问题,工程设置了双线五级船闸和一线垂直升船机。相比较过船闸耗时超过3 小时而言,升船机可将耗时缩短至40 min~60 min,且升船机还具有不耗水的特点,足见其明显的优势。三峡升船机计划于2015 年投入运行,届时将能满足3000 吨船舶在40 min 内过闸,提高了船舶过坝效率,成为三峡双线五级船闸“楼梯式过坝”的有效补充。
长江三峡升船机采用的是湿运工作方式,即采用一只装水的船厢作为载体运载船舶升降的方式。根据巴斯克原理,不论船厢中有无船只,带水船厢的总质量不会改变,利用这一条件设置同等质量的平衡重量来平衡带水船厢的总质量,实现整个系统“全平衡”的要求。船厢升降驱动主机只需克服系统摩阻力、系统惯性力、设计允许的不平衡力等就可使整个大惯量系统按设计速度做正常升降运行,运行功耗很小。但是,由于主机对非正常条件没有足够的控制能力,因此,必须对整个升船机工程进行有效的自动监测,以保证全平衡式的升船机满足设计规定的平衡条件。
1 系统布设情况
长江三峡升船机工程在船厢室段塔柱顶部机房底板(高层196 m,即承重塔柱顶部)高程层面纵横梁上,布设了以10 个监测垂直位移的JSY-ID 型数字遥测静力水准仪测点组成的静力水准闭合回路环线。采用闭合回路环线可以使得连通管内的液体流通更加均匀,更容易趋于稳定,避免液体震荡对观测的影响,减小误差。
2 系统工作原理与技术指标
JSY-ID 型数字遥测静力水准仪是测量相隔一定距离的多个基点之间相对高程变化的一种精密仪器,由机械主体、水管系统、标定器、目视测微器、位移换能器等部分组成。主要用于大型工程如水电站、核电站、高层建筑、巨型科学实验设备等垂直变形观测。它既能进行目视观测,又具有数据自动采集、传输、处理等功能,并配备相应的软件。仪器结构示意图见图1。
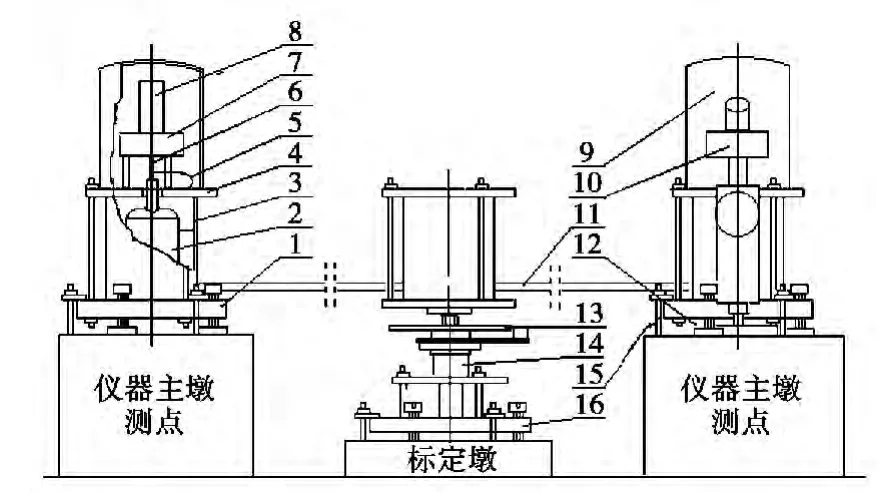
图1 系统结构示意图
2.1 系统的主要技术指标
1)液位分辨率≤0.02 mm
2)两测点高差测量中误差≤±0.1 mm
3)量程:0~20 mm
4)输出:RS485 端口,2 400 波特率
5)供电:AC36 V
6)允许环境条件:温度0 ℃~50 ℃;湿度25%~95%。
2.2 主体结构
在底座上面放置截面积相同的不锈钢钵体,钵体中盛装工作介质(蒸馏水),浮子置于水中漂浮,盖上盖板后通过不锈钢支柱和底座稳固地连成一体。导向装置由三条间距120°的簧片以及压块和夹头组成。簧片一端固定在盖板面上,另一端集中固定在中心,通过夹头和浮子连成一体,使浮子定于中心漂浮。位移传感器线圈固夹在支架上,铁芯安装在浮子上。各个主体和标定器之间用水管系统(塑料水管、三通、弯头和硅橡胶管接头等)连接成一个闭合回路。
2.3 标定器结构
标定器置于测网两端、测点中间,主要由底座、螺旋机构和标定水槽组成,其标定墩面低于测点墩面260 mm,转动度盘带动螺旋机构使标定水槽上下运动。
2.4 位移传感器
在位移换能器中选用线性差动变压器(即LVDT)把位移量变成电信号,其工作原理实质上是铁芯可动的变压器,原理如图2 所示。
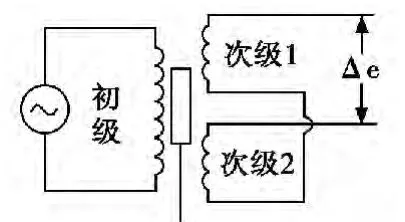
图2 位移传感器原理图
当铁芯在线圈内移动时,改变了磁通的空间分布,改变了初、次级之间的互感量。当适当频率的电压激励初级绕组时,次级线圈就产生电动势。随着铁芯位置的不同,互感也不同,次级产生的感应电动势也不同,这就把铁芯的位移变成了电压信号输出。若将两个次级绕组反向串接,其输出便是差动方式。
差动变压器的技术性能为:
1)测程:±15 mm
2)精度:0.3%
3)激励电压频率:2 kH
4)动态频率:0~200 Hz
5)灵敏度漂移:零点<0.01%/℃;满度<0.03%℃
6)工作温度:-10 ℃~+70 ℃;湿度:100%
2.5 系统的基本原理
JSY-ID 型数字遥测静力水准仪根据液体表面自然保持水平的特性进行工作。当仪器主体测点出现高程变化时,仪器主体钵体中的液面就相对于钵体出现升降变化,测量出这些变化量就可确定每一个测点相对某一基点的高差变化。
系统可用电测法测量出液面的变化量,规定液面上升,电测数值增大。
系统中的位移传感器选用专门的线性差动变压器,其输出信号经单片机处理后,直接变换成数字量(位移值)。
考虑到系统安装在基础廊道,相对湿度比较大,因此系统的供电考虑用AC36 V 供电,并安装了安全供电设施,以保证仪器的正常工作。
在AC36 V 电源输入端及RS485 输出端都有抗干扰防雷击电路。
如图3 所示,设A 为基准点。1,2,…,n 点为测点,且这些点均放置截面积相同的钵体,每个测点相对于A 点的高差h1,h2,…hn 可由下式确定:
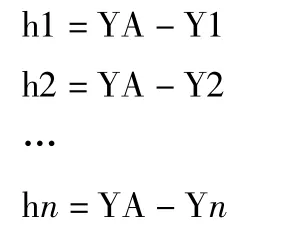
YA,Y1,……,Yn 为A 点及测点1,测点2……测点n 的液面变化量。
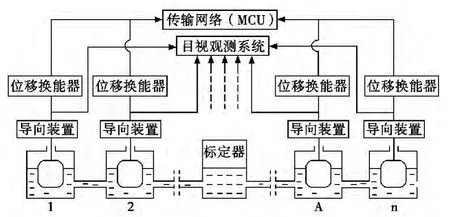
图3 系统原理图
2.6 电路原理框图
本系统可同时用电测法和目视法量测液面变化量Y,规定当液面上升时电测和目测数值增大。电测法是借助于固定在浮子上的位移换能器输出一个数字电信号,数字信号输出可进入各种传输网络,以随时监测各测点的形变。目测法是通过专用的光学系统及测微机构组成的目视测微器,定期进行目视读数观测。在特殊情况下如检修电子遥测系统时,也能保证观测资料的连续性和准确性。
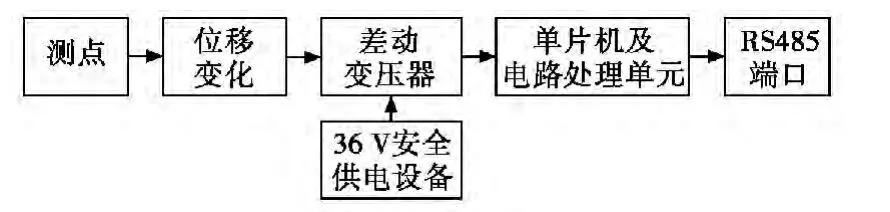
图4 电路原理图
3 系统标定
当仪器安装完毕后,需进行标定以检查仪器是否处于正常工作状态。
装有JSY-ID 型数字遥测静力水准仪的闭合环路配有一个标定器(如图1 所示),标定器借助标定水槽的上下移动,改变JSY 仪器所盛水的体积以达到人为改变各测点钵体中液面上升下降的变化,标定器精度:≤0.05 mm。标定器的度盘转一圈,标定器上的水糟垂直位移1 mm,由于标定器的水槽与各主体钵体是统一制品,则对于m 个标定、n 个钵体内液面高度的变化ΔH 水可以如下计算公式确定:

式中:ΔH水为标定棒移动量,r棒为标定棒半径,r 为钵体半径(均等),r标为标定筒半径,单位为mm。r、r棒、r标在仪器出厂时给出实测值。ΔH水是预先给出。
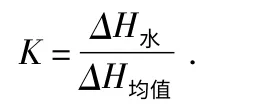
每个测点的水位变化通过传感器反应给换能器,通过换能器485 数字输出,大范围地改变每个测点的水位,得出每个测点的水位差值H485输出,均值ΔH均值,
4 系统运行情况及结果分析
JSY-ID 型数字遥测静力水准自动化监测系统自安装调试后运行以来,未出现硬件故障,系统稳定性较高。且采用闭合回路环线后,观测结果更为接近理论值,误差更小,系统可靠性更高。表1 为JSY-ID 型数字遥测静力水准自动化监测系统在一个观测周期内的观测值。
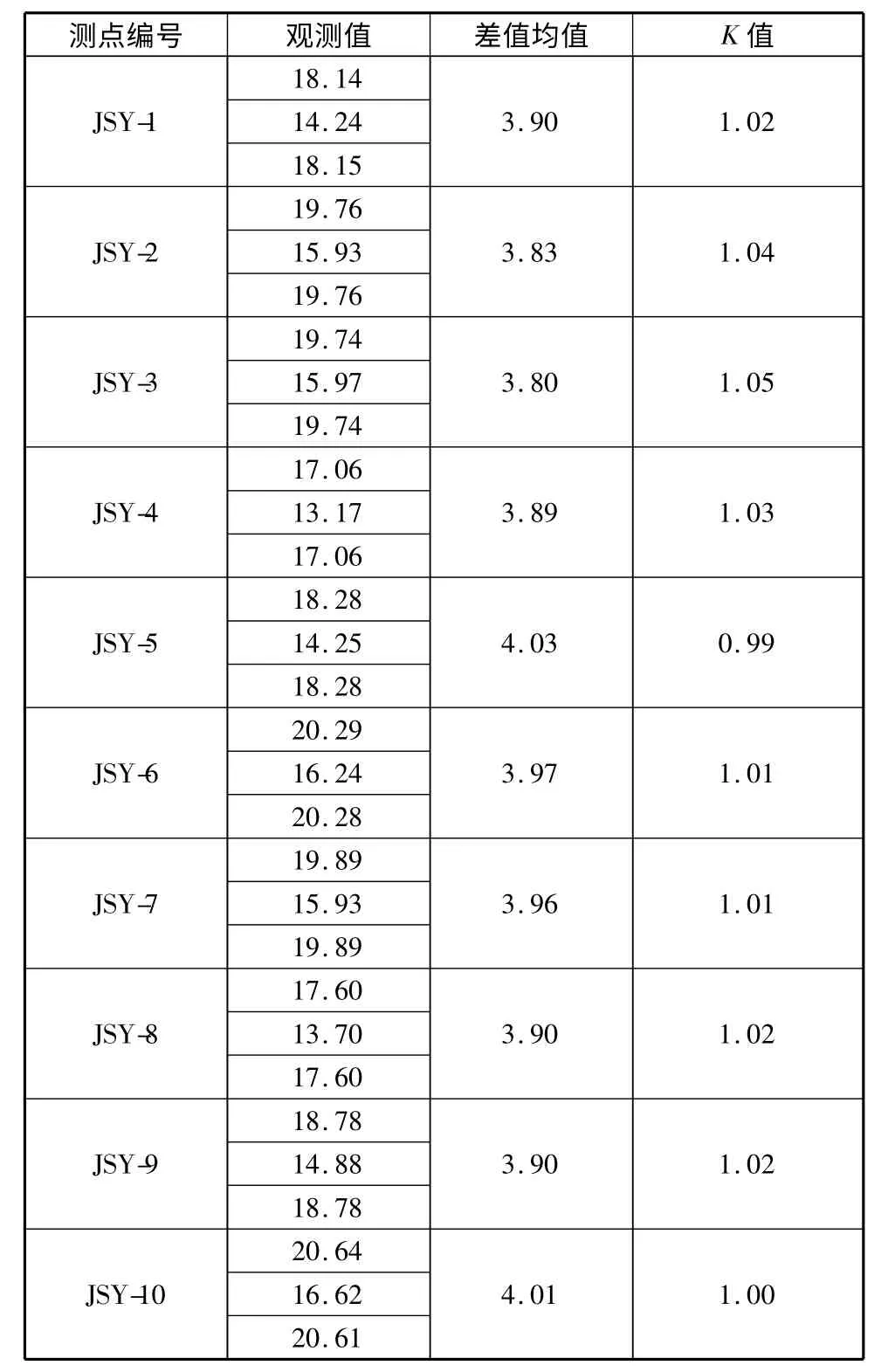
表1 系统观测数值表
系统观测一个初始读数后,标定一次使液面下降40 mm,待液面稳定后观测二次读数。然后再标定一次使液面上升同样的高度,稳定后观测三次读数。由表1 可看出,经过两次标定后,每个测点的液面高度基本都能回到初始读数的高度。且两次标定读数的差值相差很小,系统重复性较好,所得差值的均值代入计算公式得到的系统K 值也非常接近理论值。
5 结论
从JSY 静力水准自动监测系统在三峡升船机工程中的使用效果来看,其测量结果能满足要求。闭合回路环线减小了观测误差,提高了观测精度。整个测量过程无漂移现象,仪器设备运行状态稳定,可靠性高。
[1]欧同庚,赵义飞,李农发,等.JSY-ID 型数字静力水准遥测仪性能测试及标定方法研究[M].大地测量与地球动力学,2013,33(S22):88-90.
[2]陈容,张永兴,许德明,等.静力水准仪在碧口水电站的应用[J].西北水电,2011(1):17-20.
猜你喜欢
防爆电机(2022年1期)2022-02-16
昆钢科技(2021年6期)2021-03-09
装备制造技术(2020年4期)2020-12-25
民用飞机设计与研究(2019年2期)2019-08-05
电子制作(2019年11期)2019-07-04
中国三峡(2017年1期)2017-06-09
中国三峡(2017年1期)2017-06-09
中国三峡(2017年1期)2017-06-09
现代工业经济和信息化(2016年6期)2016-05-17
体育科学研究(2015年5期)2015-02-28