基于EEMD-RVM的陀螺漂移混合建模预测*
2015-11-28 03:35:58汪立新
传感技术学报 2015年10期
田 颖,汪立新,李 灿,陈 伟
(第二炮兵工程大学,西安710025)
基于EEMD-RVM的陀螺漂移混合建模预测*
田 颖,汪立新*,李 灿,陈 伟
(第二炮兵工程大学,西安710025)
陀螺漂移序列具有非平稳和非线性的特点,针对单一模型难以对其实现精确预测的问题,提出一种基于集合经验模态分解(EEMD)和相关向量机(RVM)的混合建模方法,实现对陀螺漂移序列的区间预测。首先,利用集合经验模态分解将漂移序列分解为多个模态和一个余量;将模态区分为噪声和趋势两个分量,对噪声分量建立分布模型,对趋势分量建立RVM模型,两者等权相加还原得混合模型;最后,给定置信度,得到置信区间预测结果。将该方法用于某振动陀螺漂移序列预测实例,结果表明:该混合预测模型能准确预测陀螺漂移,其中RVM的预测精度达到99.86%,且验证集以给定的置信度落在预测区间内,可为陀螺的寿命预测和性能分析提供依据。
陀螺漂移;建模预测;集合经验模态分解;相关向量机
研究惯性器件的可靠性,预测其寿命,对于保持航空、航天器的性能及设备维护的决策具有重要意义。惯性器件的漂移值和寿命密切相关,漂移参数中蕴含了重要的性能信息,是寿命预测研究中的一个重要参数,一旦陀螺仪出现故障,必将在其漂移中显现。因此,陀螺仪漂移建模预测研究是其研究的一个重要组成部分,研究陀螺仪的漂移特性、漂移模型对陀螺仪的性能分析、寿命预测非常重要[1-2]。
陀螺漂移时间序列具有随机性和非线性的特点,通过单一预测模型建模难以实现预测,且陀螺漂移序列不仅蕴含有价值的性能信息,同时还包含了受随机因素影响的离乱信号。对于分布离乱、规律不显著的数据序列,给出确切的预测值难度大、价值小。对这样的序列,可以考虑给出未来值的变化范围,得到上下边界,即进行区间预测。本文根据随机漂移的特性,提出一种EEMD与RVM相结合的混合建模方法,以实现对陀螺漂移的区间预测。
1 基于EEMD的漂移数据分解及分析
1.1 EEMD原理
陀螺漂移序列是历史数据组成的时间序列,在频域内没有实际意义。而EEMD基于信号的自身的时间尺度,具有自适应性、直观性,可以用于陀螺漂移序列的处理,从而在时间尺度上考察信号变化的“频率”。
EMD基本理论与分解步骤详见文献[3],EMD方法将任意非线性、非平稳信号分解为若干个基本模式分量和一个余项。较EMD而言,EEMD能够减少模态混叠,使单一模态的频率更为单一,规律性更强。
EEMD方法加入白噪声后,改变了信号极值点的特性,将使信号在不同尺度上具有连续性,促进抗混分解,避免模式混淆[4-5]。
EEMD分解步骤如下[6]:
①原始信号s(t)中多次加入具有均值为零、幅值标准差为常数的白噪声ni(t),即

式中,si(t)为第i次加入白噪声后的信号,ni(t)为第i次加入的白噪声。
②对所得的含白噪声的信号 si(t)分别进行EMD分解,得到各自的IMF记为cij(t),一个余项记为ri(t)。其中cij(t)表示第i次加入白噪声后分解所得的第j个IMF。
③利用不相关随机序列的统计均值为0的原理,将上述对应的IMF进行总体平均运算,得到EEMD分解后最终的IMF,即

式中,cj(t)为对原始信号进行EEMD分解后所得的第j个IMF。
对分解的结果直接等权相加即可对信号进行还原。
在EEMD方法中,有加入白噪声的大小和总体平均次数这两个重要参数需要选定,本文采取一种自适应EEMD方法选取参数[7]。
加入白噪声的大小的选取:

式中:λ为加入白噪声幅值的标准差σn与原始信号幅值标准差σo的比值系数,即;Ε为信号中高频成分幅值标准差σh与原始信号幅值标准差σo的比值系数,即,因此式(3)等价于

总体平均次数的选取:
加入白噪声的比值系数与总体平均次数之间的关系满足

式中,e为期望信号分解相对误差的最大值;λ为加入白噪声的幅值标准差比值系数;N为在EEMD方法中总体平均的次数。
1.2 数据分析
本文在分析漂移数据时,对原数据及EEMD分解后各模态的频率特性进行观察,因为惯性器件的性能退化发生在较长的时间尺度内,所以可以认为低频部分蕴含了更多的寿命信息,而高频部分则可能是由振动、温度等环境或其他因素所造成。
对数据的高频部分,已知EEMD分解得到的模态分量为具有平稳性,可具体分析其分布特性。检验分布是正态分布有正态概率纸检验法等,正态概率纸检验法简单直观,原理见文献[8],其判断标准为观察正态概率纸上的点是否在一条直线上,若近似在一条直线上,则接受“样本分布为正态分布”的假设。
2 相关向量机建模预测
2.1 相空间重构
利用相关向量机进行时间序列建模预测时,首先要进行相空间重构,从而建立起输入输出之间的对应关系。对于时间序列,假设si与之前r个值si-1,si-2,…,si-r之间存在映射关系:

式中:r称为嵌入维数,ζ(·)为映射关系[9]。
以序列{s1,s2,…,sm}构建训练集,,其中:为输入样本,ti=si+r为输出样本,训练样本数为N=m-r。利用训练集训练RVM,获得ζ(·)的逼近值,通过该映射关系实现对后续数据的预测。
2.2 RVM回归预测

式中:样本噪声εi~N(0,σ2),则

RVM模型输出表示为


RVM训练目的是求出权值向量ω的后验分布。假设ωj(j=0,1,…,N)服从均值为0,方差为的高斯分布,则ω的先验条件概率分布为


由于p(t|ω,β)和 p(ω|a)均为高斯分布,而 p(t|α,β)中不含ω,可看作归一化系数,则ω的后验分布可进一步表示为

后验协方差矩阵和均值分别为
式中:A=diag(α0,α1,…,αN)。超参数α和 β直接影响ω的后验分布,需对其优化以得到ω的最大后验分布。通过最大边缘似然函数 p(t|α,β)实现超参数的优化。将 p(t|α,β)取负对数得到目标函数,将目标函数对超参数αj(j=0,1,…,N)和β求偏导并令导数为0,得到迭代公式为

式中,μj为权值后验均值向量 μ的第 j个元素;γj=1-αjΣjj,Σjj为后验权协方差矩阵Σ的第 j个对角元素。式(13)和式(14)依次进行迭代计算直到所有参数都收敛或达到最大训练次数为止。
通过最大似然方法得到的超参数αMP和噪声方差若给定输入值x*,则对应输出的概率分布为

式(15)服从高斯分布,即

式中,预测均值y*和方差分别为

式(17)可看出,该回归预测值的方差由数据估计噪声和权重估计过程中的不确定性两部分组成[10]。
2.3 区间预测

3 EEMD-RVM混合模型在随机漂移预测中的应用
3.1 混合模型
用EEMD方法处理数据,分析数据,根据各模态频域特性建立不同模型,分离出满足正态分布的高频部分,建立分布模型,对能反映性能退化趋势的低频部分,进行RVM建模预测,按等权相加的方式将两模型组合为混合模型,利用RVM概率输出的特点,给定置信度,可得预测区间。

图1 区间预测结构框图
3.2 实例验证
本文所有使用的漂移序列,使用安装在隔离地基上的精密转台,在室温条件下,对某振动陀螺仪进行固定方位测试,采样频率为2.5 Hz,每天持续0.5 h,共180天。通过计算获得180天的逐日漂移数据,其中前150天的数据作为训练集,后30天的数据作为验证集(本文去除了数据的量纲)。
Step 1:EEMD分解。
按自适应方法求的EEMD分解所需的两个参数:λ=0.105,期望信号分解相对误差最大值e取1%,得到N=110。EEMD方法分解得到6个IMFs与1个余项,如图2。余项呈单调递增趋势,符合陀螺仪性能退化的规律。

图2 漂移序列EEMD结果
Step 2:对IMFs及余项进行短时傅里叶变换变换,观察频率。
如图3,其纵轴为幅值,横轴为频率。前述,漂移序列虽没有实际的频域意义,但陀螺仪性能退化信息应体现在较长的时间尺度上,在频域图上为低频部分,IMF1、IMF2、IMF3位于较高的频段,可粗略判断其并非性能退化信息,而主要受随机因素影响。

图3 FFT变换结果
Step 3:对前三个高频段的IMFs进行分布检验,从而获得判断依据。
对IMF1、IMF1+IMF2、IMF1+IMF2+IMF3这三个量分别进行正态概率纸检验。从检验结果看,IMF1+IMF2(图4)符合正态分布,加入IMF3后正态性被破坏(图5),故认为IMF3仍含有趋势,将IMF1+ IMF2作为噪声分量,其模型为,其中:ti为噪声分量,yi为估计均值,为估计方差,该量作为序列中的高斯噪声,余下模态为变化趋势。

图4 IMF1+IMF2正态概率纸检验

图5 IMF1+IMF2+IMF3正态概率纸检验
Step 4:将噪声分量从漂移序列中去除,得到趋势分量,建立其RVM预测模型。嵌入维度选择5[12],考虑模型中仍具有复杂的频率成分,选择Gaussian核函数作为RVM建模的核函数,训练次数为50次,核宽度为唯一需优化参数,通过留一法获取[13]。预测精度用Pf=1-MRE评定,其中MRE为平均相对误差。验证集的一步预测结果如图6,预测精度为99.86%。若不提取趋势分量,直接对原漂移信号序列直接进行RVM预测,预测精度仅为95.84%,随机因素的去除使得RVM预测精度明显提高。
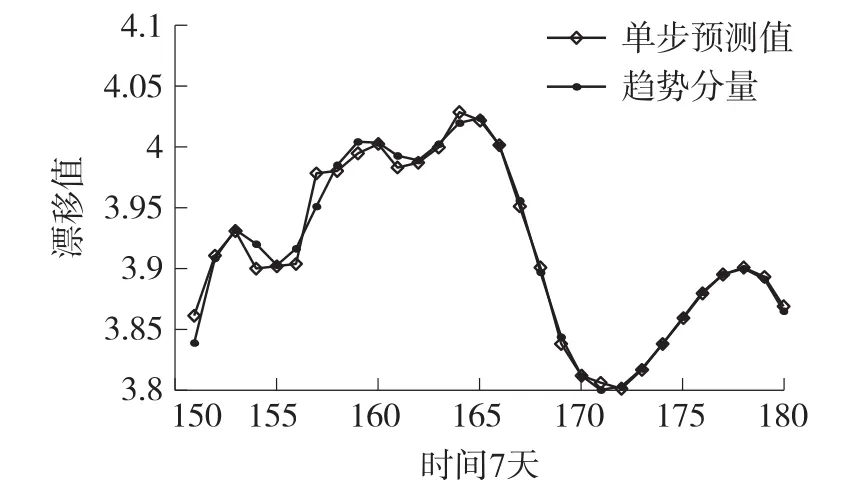
图6 趋势分量的RVM预测结果
Step 5:依照等权相加的EEMD数据还原规则,得到混合模型,则有最终预测值:tp=ti+t*,其中,预测值的概率密度如图7。由式(19)可根据所需置信度求取预测区间:

zθ/2为上分位数。当置信度1-θ=0.8,有23个点落在预测区间内(77%);置信度1-θ=0.9(图8),有26个点落在预测区间内(87%);漂移序列基本以给定置信度落在预测区间内,区间预测效果理想。

图7 预测值的概率密度

图8 0.9置信度的预测区间
4 结论
本文利用EEMD、FFT、正态概率纸检验等方法分析处理陀螺仪漂移序列,将其区分为噪声分量与趋势分量分别建模,还原得到混合模型,实现了区间预测。该方法能克服离乱数据难以给出确切预测值的不足,能以给定置信度预测序列未来值的取值区间,实例证明了该混合模型预测区间的有效性,为陀螺仪的漂移建模提供了新思路,可为其寿命预测、性能分析提供依据。
[1]樊春玲,高峰,孙四通.基于灰色模型的混合建模预测方法及其应用[J].中国惯性技术学报,2008,16(4):475-479.
[2]李泽民,段凤阳,马佳智.基于支持向量机的MEMS陀螺仪随机漂移补偿[J].传感技术学报,2012,25(8):1084-1087.
[3]Huang N E,Zheng s,Long S R.The Empirical Mode Decomposi⁃tion and the Hilbert Spectrum for Nonlinear and Non-Stationary Time Series analysis[J].Proc R SocLond A,1998,454:903-995
[4]Yang Yu,Yu DeJje,Cheng Junsheng.A Rolling Fault Diagnosis Method Based on EMD Energy Entropy and ANN[J].Journal of Sound and Vibration,2006,294:269-277.
[5]何星,王宏力,陆敬辉,等.一种用于陀螺随机漂移预测的多尺度混合建模方法[J].中国惯性技术学报,2014,22(2):271-275.
[6]Wu Z H,Huang N E.Ensemble Empirical Mode Decomposition:a Noise-assisted Data Analysis Method[J].Advances in Adaptive Data Analysis,2009,1(1):1-41.
[7]陈略,唐歌实,誉艳阳.自适应EEMD方法在心电信号处理中的应用[J].数据采集与处理,2011,26(3):361-366.
[8]吴翊,李永乐,胡庆军.应用数理统计[M].北京:国防科技大学出版社,2003.
[9]沈强,刘洁瑜,王琪,等.基于相关向量机的MEMS陀螺仪随机漂移补偿[J].传感技术学报,2014:27(5):596-599.
[10]Tipping M E.Sparse Bayesian Learning and the Relevance Vector Machine[J].Journal of Machine Learning Research,2001,1(1):211-244.
[11]范庚,马登武,吴明辉,等.电子系统状态时间序列预测的优化相关向量机方法[J].系统工程与电子技术,2013,35(9):2011-2015.
[12]张弦,王宏力,张金生,等.状态时间序列预测的贝叶斯最小二乘支持向量机方法[J].西安交通大学学报,2010,44(10):42-46.
[13]范庚,马登武.基于组合优化相关向量机的航空发动机性能参数概率预测方法[J].航空学报,2013,34(9):2110-2121.

田 颖(1991-),男,湖南人,硕士研究生,控制科学与工程专业,主要研究方向为惯性器件的寿命分析及预测研究,inevermore0430@163.com;

汪立新(1966-),男,湖北人,博士学位,教授,博士生导师,主要研究方向为惯性技术、组合导航及信号测试与处理,wlxxian@ 163.com。
Mixed Modeling for Gyro Drift Prediction Based on EEMD-RVM*
TIAN Ying,WANG Lixin*,LI Can,CHEN Wei
(The Second Artillery Engineering University,Xi’an 710025,China)
In view that the timeseries of gyro drift cannot be preciselypredicted by single forecasting model due to its non-linear and non-stationary characteristics,interval forecasting for gyro drift series can be obtainedwith hybrid modeling method based on ensemble empirical mode decomposition(EEMD)and relevance vector machine(RVM)which is proposed.Firstly,the drift data is decomposed into a series of intrinsic mode function and one residue via EEMD.Secondly,modes areclassified into two categories:noise component and trend component,the distributionmodel of noise component and the RVM model of trend componentis established,two models are added with equal weight to establish the hybrid model.In the end,we set the confidence coefficient to obtain interval forecasting.By using the proposed method for a vibratory gyro drift prediction,the experiment result shows:in hybrid model,RVM prediction accuracy is 99.86%,validation set is contained by prediction interval with designated confidence coefficient.The hybrid model could provide reliable evidence for life prediction and performanceanalysis of gyro.
gyro drift;modelingprediction;ensemble empirical mode decomposition;relevance vector machine
V240.2 V241.5
A
1004-1699(2015)10-1520-05
��7230
10.3969/j.issn.1004-1699.2015.10.018
项目来源:空军装备延寿专项研究项目(201213019005)
2015-04-27 修改日期:2015-07-22
猜你喜欢
核科学与工程(2021年4期)2022-01-12 06:30:22
北京航空航天大学学报(2021年9期)2021-11-02 08:24:32
小学生学习指导(低年级)(2019年10期)2019-10-16 08:12:34
学生天地(2019年6期)2019-03-07 01:10:46
军事文摘(2018年24期)2018-12-26 00:58:18
计算机应用(2018年5期)2018-07-25 07:41:26
快乐语文(2018年36期)2018-03-12 00:56:02
百科探秘·航空航天(2017年9期)2017-12-31 07:24:12
山东工业技术(2016年15期)2016-12-01 05:32:01
系统工程与电子技术(2016年7期)2016-08-21 13:59:14