基于双处理器架构的开关磁阻电机远程控制系统
2015-11-25 09:35:42刘亚亮范少雄姜文涛
电工技术学报 2015年2期
蔡 燕 刘亚亮 范少雄 姜文涛
(天津市电工电能新技术重点实验室(天津工业大学)天津 300387)
0 引言
开关磁阻电动机(Switched Reluctance Motor,SRM)驱动系统是20 世纪70 年代问世的一种新型调速系统,具有结构简单、调速范围宽、调速性能优越等优点,是极具潜力的新一代交流无极调速系统[1-3],广泛应用于航空工业、机车牵引、矿山掘进等领域[4-8]。
传统的开关磁阻电机调速系统,往往采用单处理器完成数据采集、算法处理、管理与通信等功能,随着对电机控制的要求越来越高,这种简单的控制方式的缺点越来越突出;在硬件上,主控制器的外围芯片越来越复杂;软件上,程序更加繁琐,各部分协调工作对芯片的处理速度和并行处理能力要求也越来越高;直接采集SRM 位置信息导致主控制器与位置传感器之间距离受到限制,抗干扰性差。这种集中控制方式不能很好地满足现代复杂控制系统的要求,模块化控制越来越得到广泛的应用。
目前很多学者对双处理器架构的开关磁阻电机调速系统进行了广泛的研究。文献[9,10]利用双处理器对开关磁阻电机无位置传感器技术进行了研究,其中文献[9]采用DSP 和FPGA 构建了双处理器架构的开关磁阻电机控制系统,具体地,数字信号处理器DSP 负责实现PID 调速、电流斩波控制(Current Chopping Control,CCC)和角度位置控制(Angle Position Control,APC),用FPGA 可编程控制器构建转子位置估计模块,简化了系统结构,提高了系统的可靠性和实时性。文献[11-15]采用 DSP 和CPLD 分别进行算法控制和逻辑处理,运算速度快且编程灵活,其中CPLD 用来实现转子位置信号综合、驱动信号的分配等纯数字组合逻辑及时序逻辑功能。文献[16]利用TMS320C31 和CPLD 协调工作来改善开关磁阻ISG 性能。其中,TMS320C31 主要根据ISG 系统的各种状态确定相应控制策略。文献[17]设计了基于双DSP 的磁浮开关磁阻电机控制系统,采用双口RAM 作为数据交换的媒介,通过一定的读写机制实现双DSP 之间大量数据的实时交换。
本文针对高性能开关磁阻电机调速系统的特点,提出一种DSP+MCU 双处理器架构的控制系统。与传统的单DSP 控制系统相比,该系统可大大降低单CPU 的控制负担,充分发挥DSP 和单片机的各自优势,满足高性能开关磁阻电机高精度实时位置控制的要求,提高系统的可靠性。采取DSP+MCU的方案,解决了所有任务交由DSP 完成导致的DSP处理能力下降的问题,更利用了MCU 成本低、对外部I/O 设备控制能力强的优势,使得二者功能互补。主从控制器之间通过 CAN(Controller Area Network)总线实现数据通信,增加了控制器与电机之间的信息传输距离。
1 系统总体设计
系统采用基于双处理器架构的SRM 控制方案,其中主从控制器任务不同,分工明确。为实现开关磁阻电机高精度位置控制,采用11 位绝对式编码器采集转子位置,并行传输给从控制器。从控制器负责转子位置采集、换相位置判断和转速计算等任务;主控制器实现电压/电流信号采集、转速/电流双闭环调节器的PI 参数调节、功率变换器驱动信号输出、故障保护等功能,以及负责电流斩波、电压斩波位置控制等任务。作为开关磁阻电机换相依据的转子位置信号,由从控制器通过CAN 总线传输给主控制器,转速信号在换相命令发送结束后发送。主控制器通过CAN 总线传输控制命令(电机正转启动、反转启动、制动和停止)和角度调节信号,在线调节控制开关磁阻电机,实现电机性能优化。双处理器架构的SRM 调速系统原理图如图1 所示。
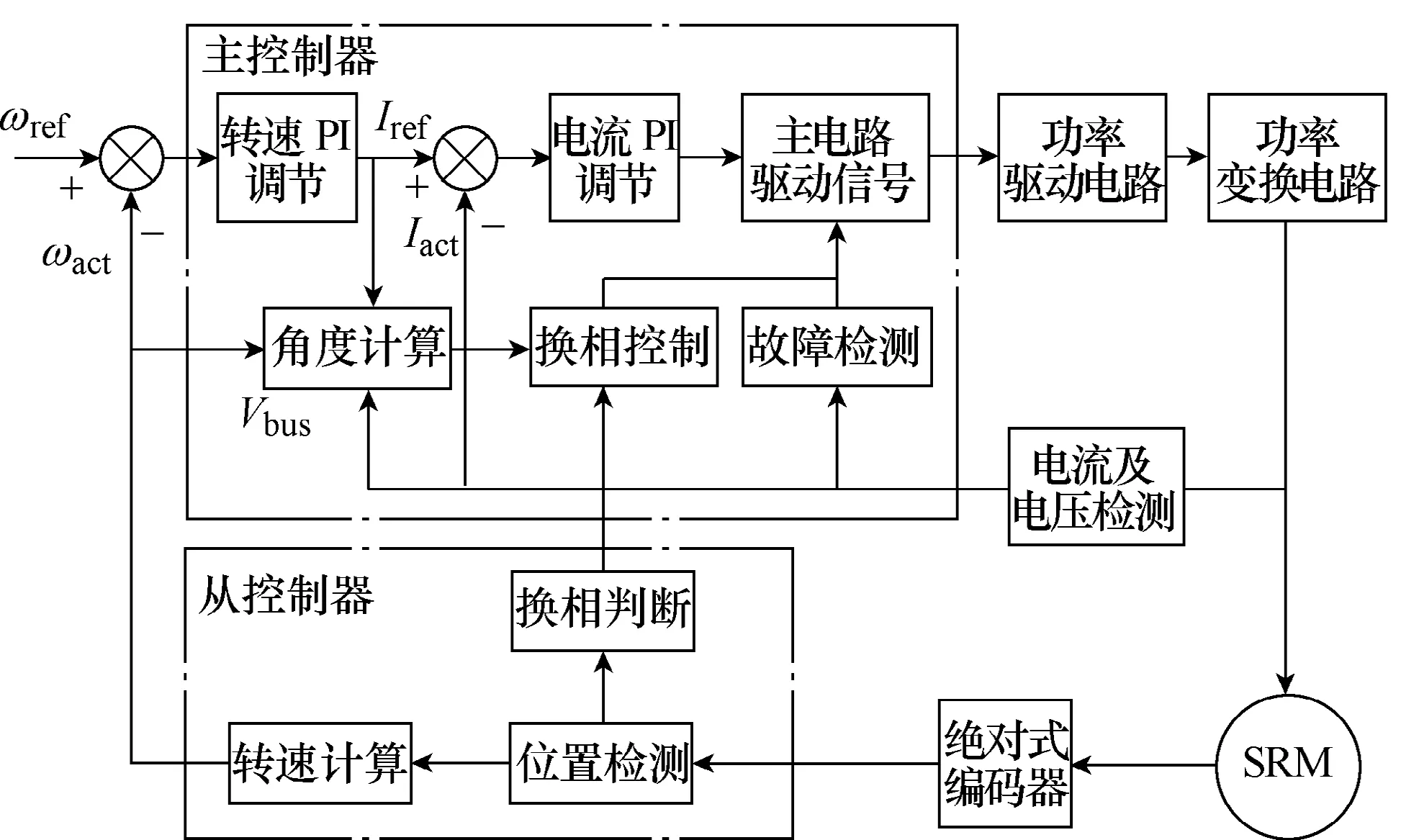
图1 双处理器架构的SRM 调速系统原理图Fig.1 The schematic diagram of SRM speed control system based on dual processor architecture
传统控制中位置传感器采用串行或并行线传送位置信号给控制器,存在易受电磁干扰、传输信号故障率高等问题,一定程度上阻碍了开关磁阻电机的广泛应用。本文提出一种基于CAN 总线的高精度实时位置控制技术,即采用绝对式编码器作为位置传感器,从控制器安装在电机支撑盘上负责位置信息处理,主从控制器之间通过CAN 总线进行通信。这样不仅解决了SRM 控制系统中控制器不能较好实现远距离控制的问题,还利用CAN 总线传输消息帧短、抗干扰性强、具有错误检测能力等特点提高了系统的可靠性。
2 系统中延时分析及补偿
2.1 CAN 通信协议的制定
CAN 通信协议中规定传输信号为短帧结构,具有传输时间短、抗干扰性强的优势。同时具有优良的仲裁和同步机制、报文自动过滤重发、总线错误检测机制,使得CAN 总线特别适用于稳定性、实时性要求高的控制网络。CAN 总线规范定义了ISO规范中的物理层和数据链路层;一些国际组织定义了应用层,用户可根据需要自行设计应用层。
为了满足基于双处理器架构的SRM 控制方案的需要,本文自定义了CAN 的应用层协议。通信采用标准帧结构,传输数据长度为2 个字节,其中传输数据高三位定义为功能码,分别表示换相命令、转速信号、控制命令和角度调节信号。
2.2 CAN 总线传输的带宽分配
系统中主从控制器通过CAN 总线实现数据交换。系统中传输数据分别为换相命令、转速信号、控制命令和角度调节信号。其中换相命令、转速信号为周期性实时数据,控制命令和角度调节信号为非周期性实时数据,采用固定优先级调度的方法传输,设置传输优先级从高至低分别为控制命令、换相命令、角度调节信号和转速信号。
此类数据发送基于事件触发,换相命令在转子位置满足换相条件时立即被发送,若采用三相12/8极开关磁阻电机,电机每转一转,从控制器发送换相命令48 次。在电机高速运转时,存在主从控制器之间交换数据量大,数据碰撞概率上升的问题,使得其实时性很难保证,为此采用类似时分原理的准时分机制,保证数据的实时性和确定性。定义电机一转总线传输换相命令总时间为系统周期T,一次换相命令所需时间为基本周期1T 。由于电机工作在不同转速,所以T 和1T 不是固定的,因此不能采用时间触发机制的CAN 通信协议(TTCAN)[18],但可采用类似时分原理的准时分机制。即可将单个电周期内换相命令发送间隔认为近似相同,把相邻两相发送时间间隔看作TTCAN 中的基本周期,换相命令及每个换相命令发送结束后触发的转速信号可近似为TTCAN 中的专有时间窗口发送;将控制命令和角度调节信号放在转速信号发送结束后发送,即放在基本周期内的竞争时间窗口发送。此方式可避免由于数据竞争造成总线堵塞,进而影响数据传输的实时性。CAN 通信协议准时分结构如图2 所示。
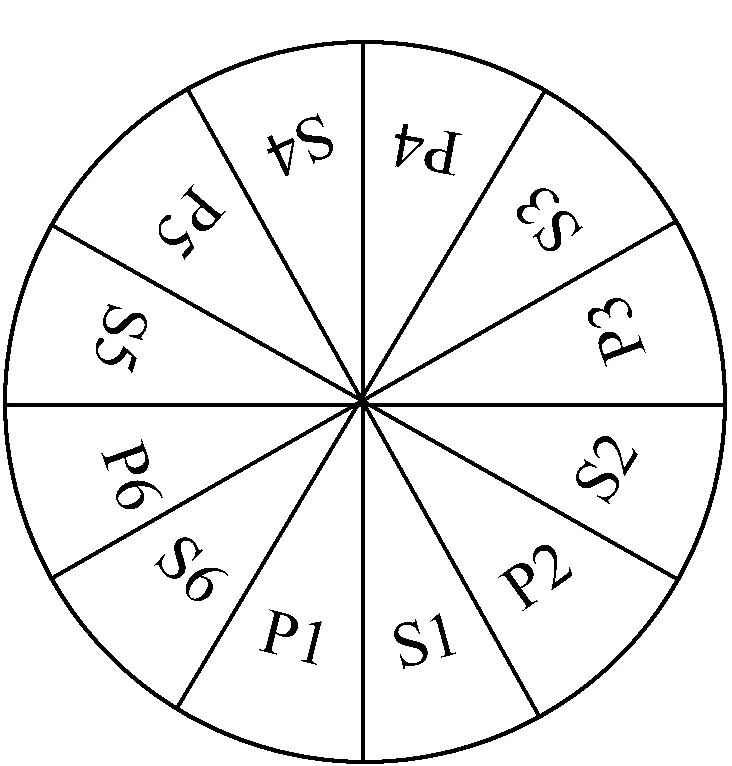
图2 CAN 通信协议准时分结构图Fig.2 The structure diagram of CAN protocol based on quasi time-division principle
图2 中,圆周图一周(1 个基本周期)表示3相12/8 极开关磁阻电机的1 个电周期,其中区间P1~P6 分别表示A、B、C 三相的开通、关断命令及转速的时间窗口,即专有时间窗口,换相命令发送后触发转速信号的发送;区间S1~S6 分别表示控制命令及角度调节信号的时间窗口,即竞争时间窗口。此方式避免了发送数据排队以及随机发送数据存在信息碰撞而产生的信息阻塞问题,一定程度上提高了系统的实时性。
2.3 系统延时分析
SRM 的运动是由定、转子间气隙磁阻的变化产生的,其遵循“磁阻最小原则”即磁通总是要沿着磁阻最小的路径闭合。SRM 的驱动通常采用低速时的斩波控制(包括电流斩波和电压斩波)和高速时的角度位置控制来实现。高速时,其控制参数为加于相绕组两端的电压、开通角和关断角。
由于SRM 定、转子的双凸极结构以及磁路的高度饱和,使得其磁链和转矩均为转子位置和相电流的高度非线性函数。电机运行时,转子的位置角不断变化,电机绕组的电感也在最大电感量和最小电感量之间周期地变化。改变开通角和关断角会影响电机绕组的电感,将产生不同的电流波形,从而影响电机输出转矩的大小和正负。设计中采用最优的开通角和关断角,实现SRM 的最优转矩输出。但若由延迟使得开通角和关断角滞后,造成换相不及时,会使相电流上升缓慢,最大值减小,导致电机输出转矩减小,电机带载能力减弱。
控制器采用主从控制方式时,主从控制器间数据交换存在延时,尤其位置信号传输的延时,会导致电机换相不及时,因此,对系统中位置信号的延时进行分析是很有必要的。
为确保SRM 实时准确的位置控制,提高SRM的性能,对系统中主从控制器间数据交换导致的延时进行了分析。目前,CAN 总线普遍采用最糟糕响应时间分析方法[19-21]。在本文的主从控制系统中,系统延时Tdelay定义为从控制器采集转子位置到主控制器开通/关断功率驱动电路这一段时间。如图3所示,系统延时可分为3 部分:从控制器采集转子位置至换相判断完成所用时间Tr、总线传输时间Tp及主控制器接收换相命令至开断功率驱动电路所用时间sT 。由于主控制器DSP 运算速度较快,可达150Mbit/s,故sT 相对较小可忽略,因此系统延时主要由从控制器处理时间Tr和总线传输时间Tp决定。而Tr时间由从控制器软件程序决定,即转子位置采集模块、格雷码转换模块及换相位置判断模块决定,其时间固定,可通过实验测试时长。总线传输时间Tp包括等待时间Twait和数据传输时间Tdata。
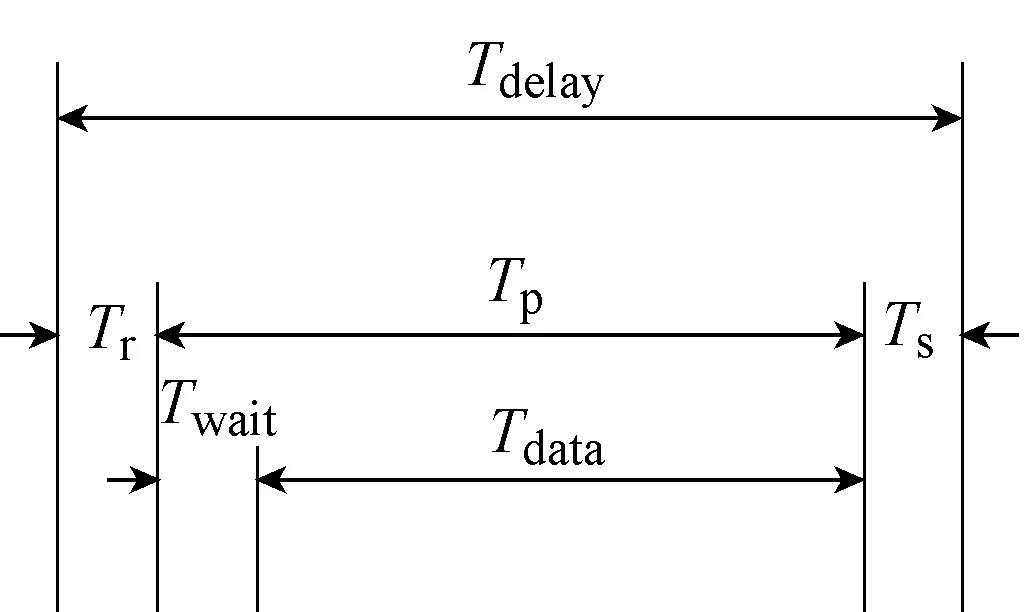
图3 系统延时组成Fig.3 The composition of the system delay time
排队等待时间Twait一般由报文优先级决定,具有不可预测性,可通过对其优先级进行算法优化来缩短优先级低的报文延时。本系统采用准时分原理的CAN 总线数据通信,避免了数据碰撞和排队等待时间。故总线传输延时主要由数据传输延时 Tdata决定。
数据传输延时Tdata由报文的数据长度和通信比特率决定,本系统设定CAN 通信比特率传输速率为1Mbit/s,故只需确定报文传输长度。采用标准帧结构,其数据格式如图4 所示。
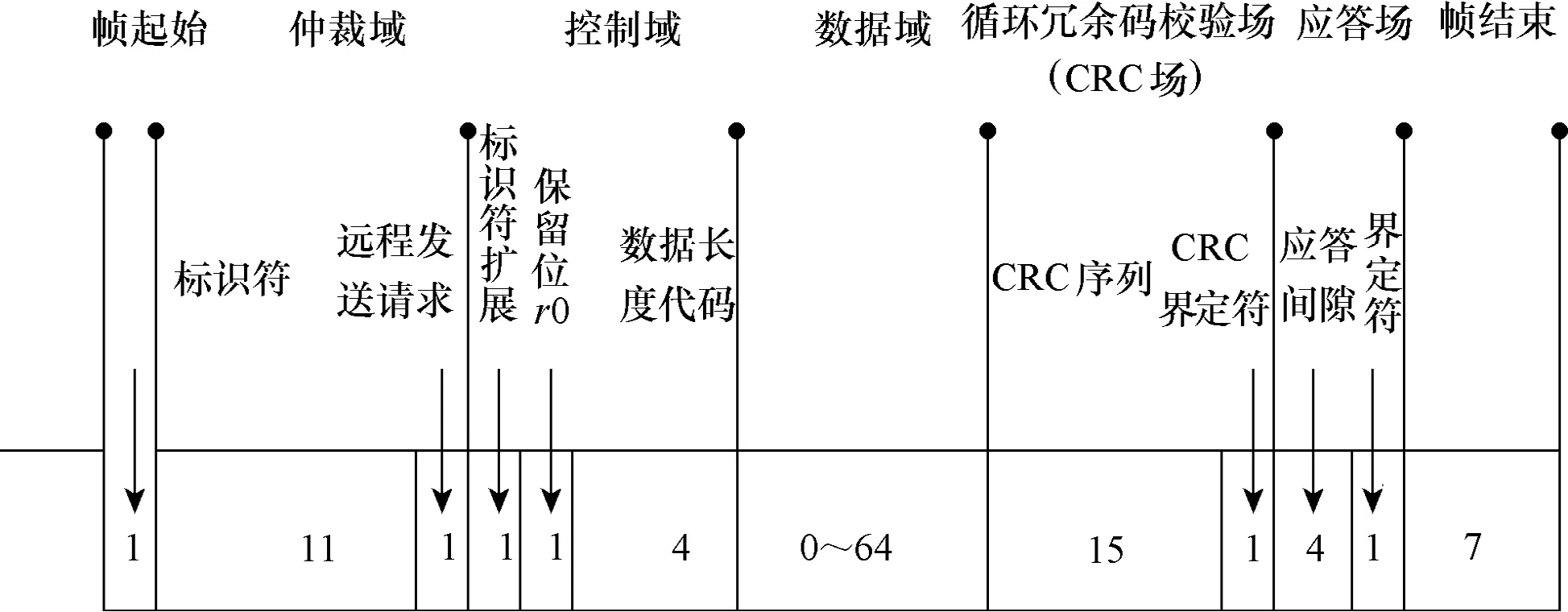
图4 标准帧数据格式Fig.4 The standard frame format
标准帧由帧起始、仲裁域、控制域、数据域、CRC 场、应答场和帧结束构成,根据CAN 协议规范,6 个连续的同极性位信号用来表征错误发生,CAN 控制器在连续的5 个同极性位之后要插入一个反极性位,接收时去掉填充位。因此,填充机制使得帧长度大于其原始长度。若在传输报文时未发生位填充,一帧消息的总长度可表示为

式中,Sm为一帧标准帧消息中的字节数;k 为消息中帧起始、仲裁域、控制域、CRC 序列的总位数,为34 位,其中前8Sm+k 位参与位填充,剩余13 位(即CRC 界定符、应答场和帧结束)不进行位填充操作。一帧消息在进行位填充操作后的总长度为

式中,j 为位填充发生次数,在最糟糕情况下,每隔4 位就添加一个相反的极性位,此时填充位数目最多,j 的最大值为

最糟糕的情况下一帧消息所用的传输时间为

式中,γ 为传输一位数据所用时间。
由式(1)和式(4)可计算出在无位填充和最糟糕情况下位填充时,CAN 总线传输不同数据长度消息帧的传输延时时长见表1。
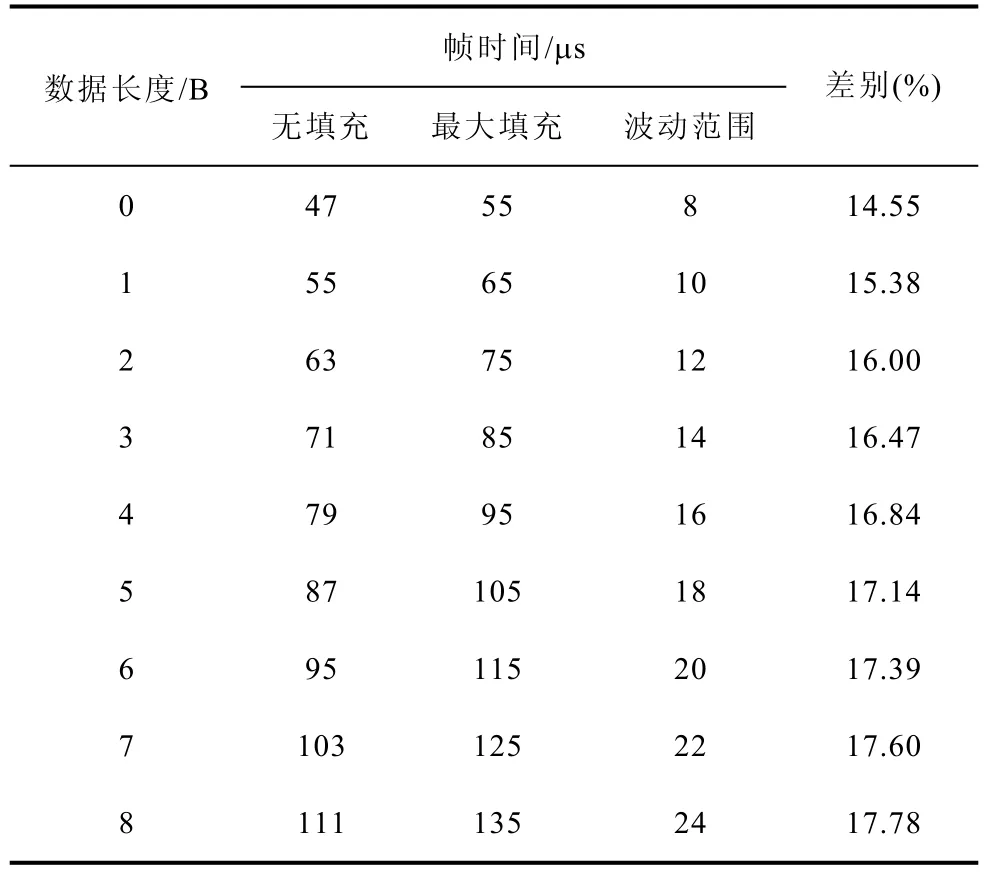
表1 不同数据长度延时情况Tab.1 The delay time of different length of data
若传输数据长度为4B,当数据在不同CAN 通信比特率传输时,在无填充和最大填充情况下,延时情况见表2。
由表1 可知,CAN 总线发送字节数越大,位填充发生次数越多,通信传输延时越长。由表2 可知,CAN 通信比特率越低,通信传输延时越长,当传输4B 数据,CAN 比特率为250kbit/s 时,传输延时为316μs。因此,为尽可能缩短数据传输延时,在满足系统要求条件下,选择数据域长度为2B,并将无填充和最大填充两种情况下传输延时的平均值作为控制电机延时补偿的依据。
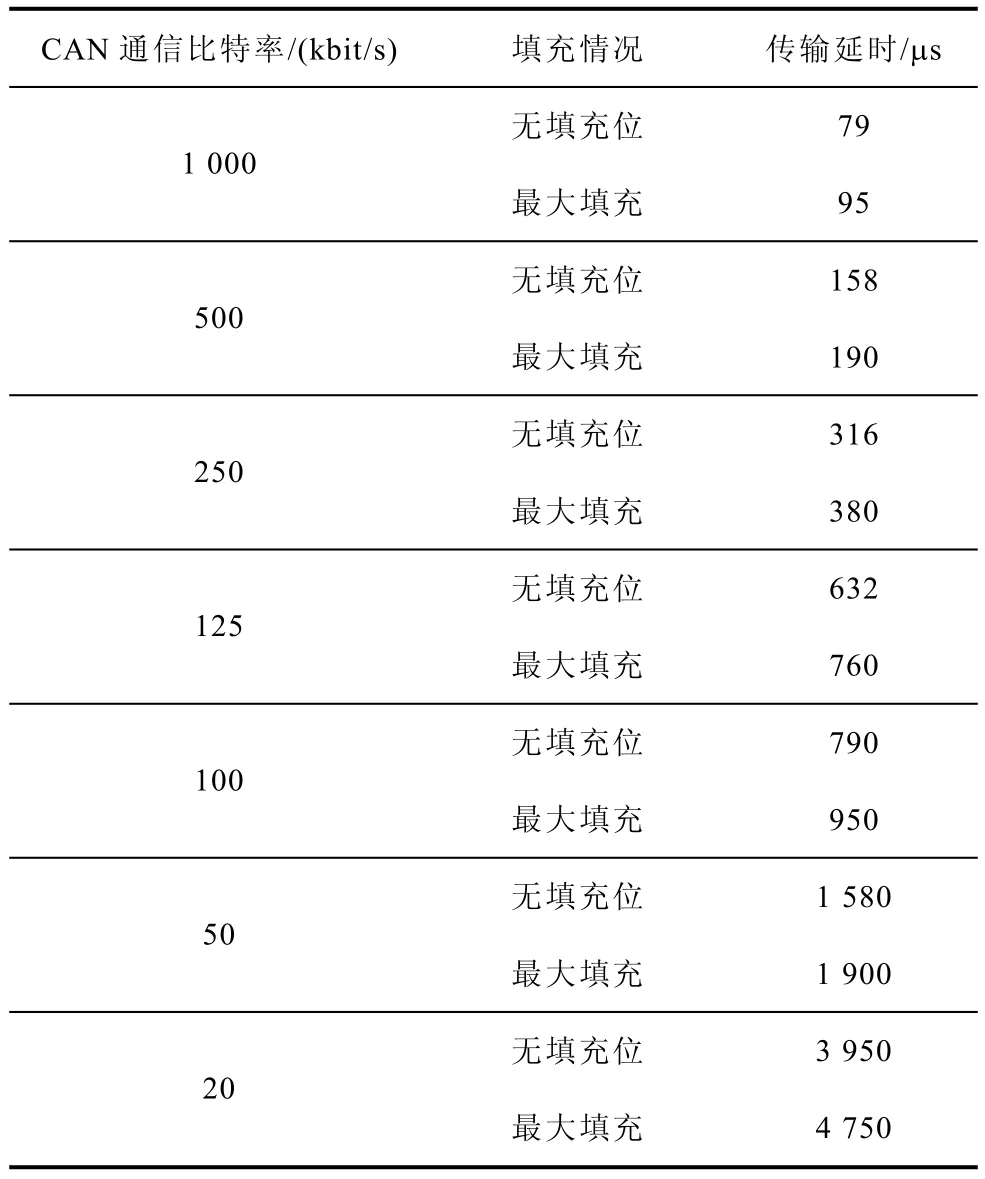
表2 不同CAN 通信比特率延时情况Tab.2 The delay time of different bit rate of CAN bus
2.4 系统延时补偿
根据上述分析计算,可得总线传输延时Tp,而Tr由从控制器软件程序决定,时间固定,可通过实验测试时长,由Tp和Tr确定系统延时Tdelay。CAN通信比特率采用1Mbit/s,传输数据为2B,故Tp约为69.13μs,Tr通过定时器测量为12.5μs,因此系统延时Tdelay为81.63μs。电机滞后机械角度与转速和系统延时之间的关系如式(5)所示。表3 给出了当系统延时为 81.63μs 时,不同转速所对应的滞后角度。
由式(5)可知,电机转速越高,系统延时造成的SRM 换相角度滞后越大。对3 相12/8 极SRM,当电机转速为 1 500r/min,CAN 通信比特率为1Mbit/s 时,系统延时造成的滞后电角度为5.880°,为保证SRM 远距离实时准确的位置控制,提高SRM驱动性能,本文将系统延时折算到不同转速下的控制角度,对SRM 进行了角度补偿控制。
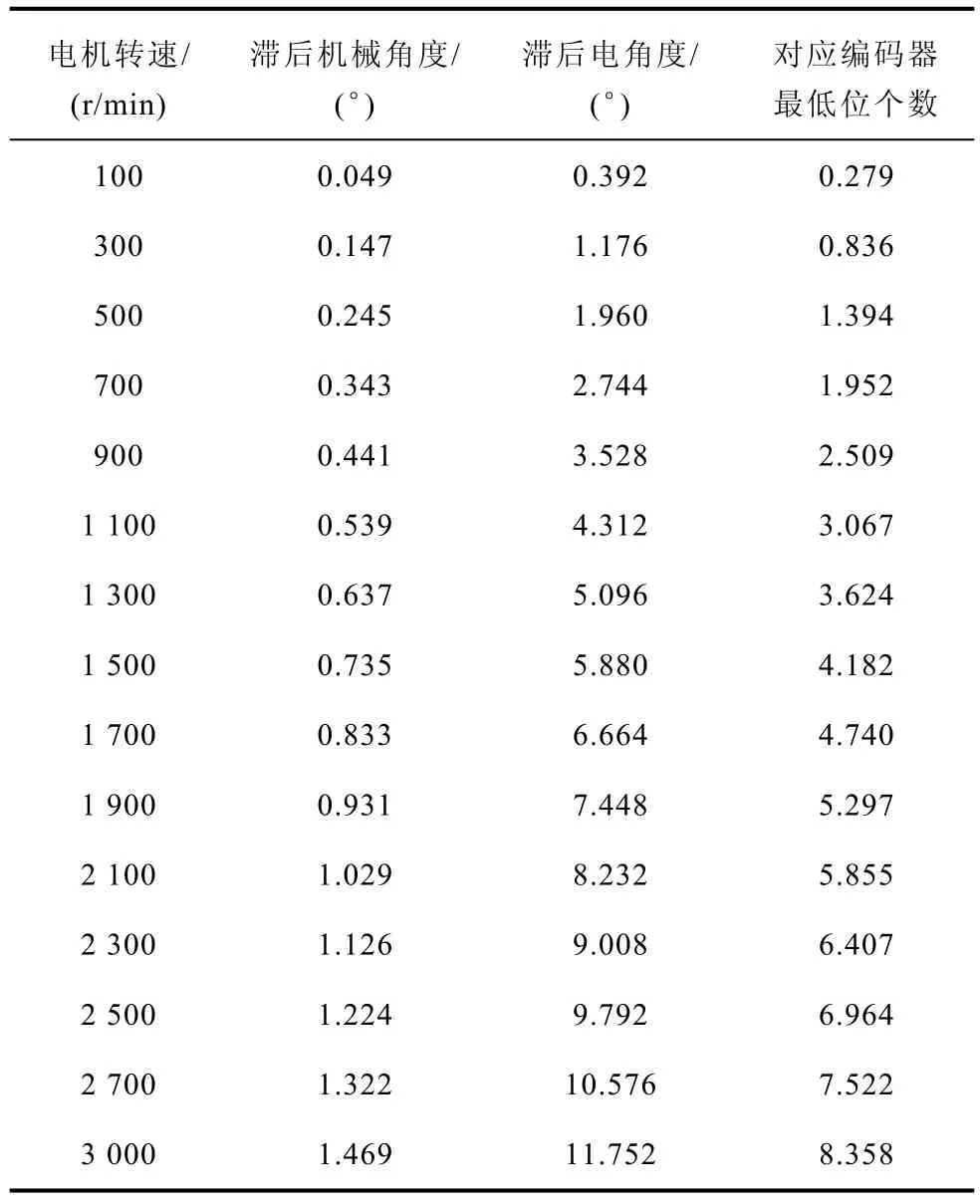
表3 不同转速下系统延时对应电机滞后角度Tab.3 The system delay in different speed corresponding to the lag angle of motor
3 实验结果
本文以TI 公司的TMS320F2812 为主控制器,以Microchip 公司的dsPIC30F5015 为从控制器,搭建了双处理器架构的开关磁阻电机控制系统,其中样机为三相 12/8 极开关磁阻电机,额定功率为1.5kW,额定转速为1 500r/min,功率变换器采用不对称半桥电路。实验平台如图5 所示。

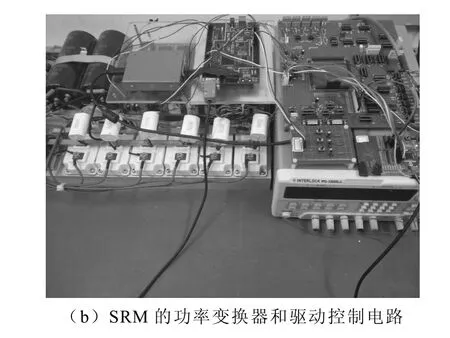
图5 双处理器架构的开关磁阻电机实验平台Fig.5 The experiment platform of switched reluctance motor based on dual-processor framework
开通角和关断角采用优化设计的角度,当电机运行于1 500r/min 时,在不同的CAN 通信比特率下,分别采用无延时补偿和有延时补偿两种方案进行实验,结果如图6 所示。图6a、图6c、图6e 分别为CAN 通信比特率采用1Mbit/s、500kbit/s、250kbit/s时,未进行延时补偿的电机相电流波形,其对应的电机输出转矩分别为4.5N·m、3.5N·m 和1.3N·m。对比可知,较低的CAN 通信速率导致传输延时较大,造成SRM 换相不及时,使得电机的带载能力严重下降。图6b、图6d、图6f 分别为电机在1Mbit/s、500kbit/s、250kbit/s CAN 通信比特率下采用延时补偿控制方法的相电流波形,其对应的输出转矩分别为6.6N·m、6.5N·m 和6.5N·m,输出转矩得到明显改善。可见,充分考虑延时会造成换相滞后,并在电机角度控制时进行补偿,可使实际的换相操作在优化设计的角度位置。
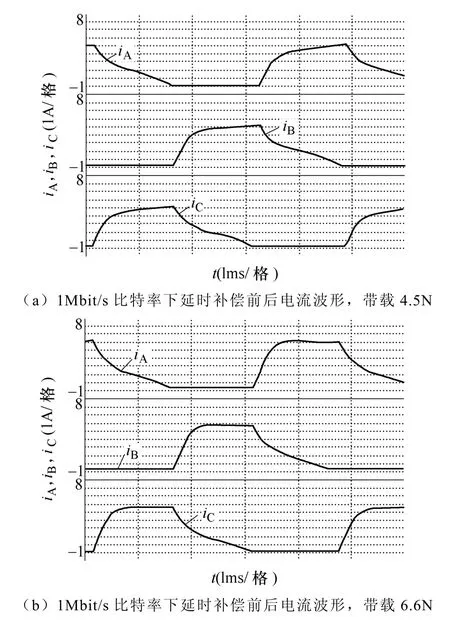
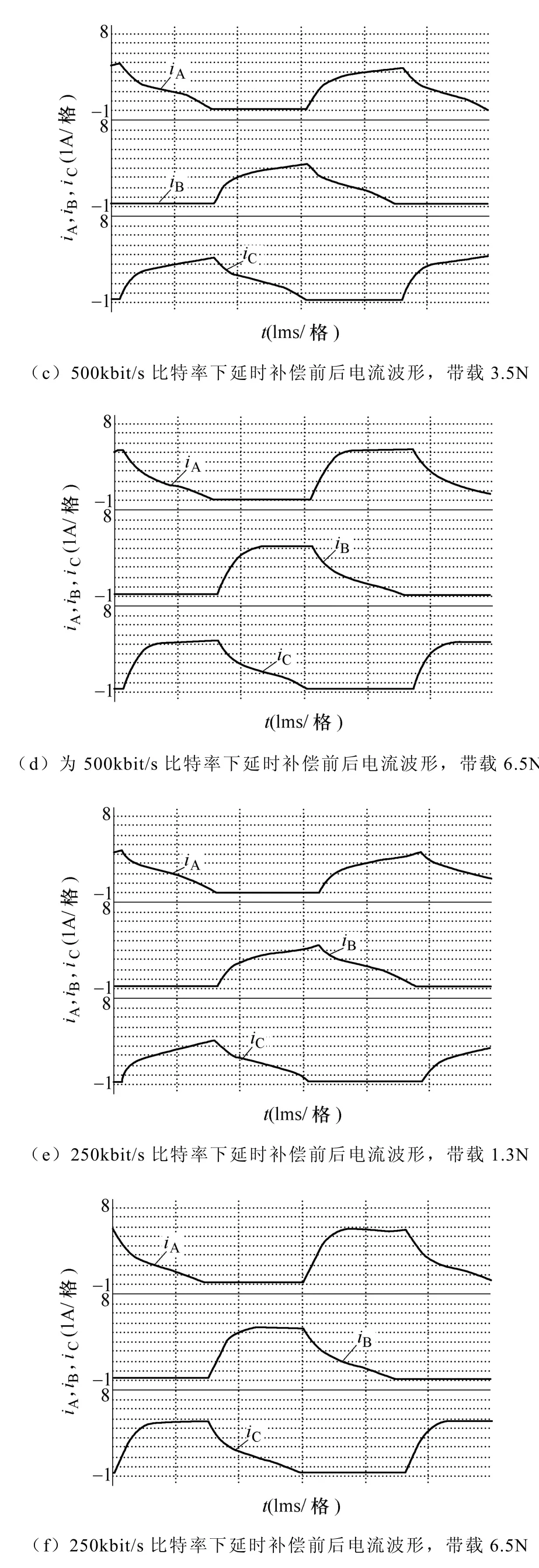
图6 电机在CAN 通信不同比特率下的三相电流波形Fig.6 Three phase current wave of SRM when the CAN bus at different bit rate
当位置传感器距离主控制器越远时,CAN 总线通信的最大比特率就越低,造成的通信延时时间也越长;而电机运行转速越高,延时造成的滞后角度越大。随着系统延时时长增加,造成绕组实际开通和关断位置相比最优开通角和关断角滞后增多,导致电机输出转矩减小。为尽可能减小数据传输延时时间,本文将CAN 通信比特率设置为1Mbit/s,并补偿了由于传输延时造成SRM 滞后动作的角度,保证了换相角在较理想的位置。实验验证了所提角度补偿方案的正确性,提高了电机的运行性能。
4 结论
针对基于单处理器的开关磁阻电机控制系统存在处理器承担任务过重、执行周期较长等问题,本文提出了双处理器架构的开关磁阻电机控制方案,以实现开关磁阻电机的远距离高性能控制。针对主从控制器间通信实时性问题,提出了基于转子位置的准时分通信机制,减少了多种数据间的冲突,并在此基础上分析并补偿了报文传输延时,实验结果表明,所提方法提高了系统的可靠性和实时性。
[1]王宏华.开关型磁阻电动机调速控制技术[M].北京:机械工业出版社,1995.
[2]詹琼华.开关磁阻电动机[M].武汉:华中理工大学出版社,1992.
[3]郑洪涛,蒋静坪.开关磁阻电机高性能转矩控制策略研究[J].电工技术学报,2005,20(9):24-28.Zheng Hongtao,Jiang Jingping.Study on high-grade torque control strategies for switched reluctance motor[J].Transactions of China Electrotechnical Society,2005,20(9):24-28.
[4]朱曰莹,赵桂范,杨娜.电动汽车用开关磁阻电机驱动系统设计及优化[J].电工技术学报,2014,29(11):88-98.Zhu Yueying,Zhao Guifan,Yang Na.Design and optimization for switched reluctance motor drive system in electric vehicles[J].Transactions of China Electrotechnical Society,2014,29(11):88-98.
[5]Inderka R B,Menne M,De Doncker,et al.Control of switched reluctance drives for electric vehicle applications[J].IEEE Transactions on Industrial Electronics,2002,49(1):48-53.
[6]Valdivia V,Todd R,Bryan F J,et al.Behavioral modeling of a switched reluctance generator for aircraft power systems[J].IEEE Transactions on Industrial Electronics,2014,61(6):2690-2699.
[7]孙玉坤,袁野,黄玉红,等.磁悬浮开关磁阻电机及其关键技术发展综述[J].电工技术学报,2015,30(22):2-8.Sun Yukun,Yuan Ye,Huang Yuhong,et al.Development of the bearingless switched reluctance motor and its key technologies[J].Transactions of China Electrotechnical Society,2015,30(22):2-8.
[8]朱曰莹,赵桂范,龚进峰,等.新型两相同步对称励磁模式开关磁阻电机及其转矩特性[J].电工技术学报,2014,29(3):144-149.Zhu Yueying,Zhao Guifan,Gong Jinfeng,et al.A novel symmetrical double-phase-excitation mode and torque performance analysis for switched reluctance motors[J].Transactions of China Electrotechnical Society,2014,29(3):144-149.
[9]陈坤华,孙玉坤,吴建兵,等.基于电感模型的开关磁阻电机无位置传感技术[J].电工技术学报,2006,21(11):71-75.Chen Kunhua,Sun Yukun,Wu Jianbing,et al.Inductance model-based sensorless control of the switched reluctance motors[J].Transactions of China Electrotechnical Society,2006,21(11):71-75.
[10]张旭隆,谭国俊,蒯松岩.在线建模的开关磁阻电机四象限运行无位置传感器控制[J].电工技术学报,2012,27(7):26-33.Zhang Xulong,Tan Guojun,Kuai Songyan.Fourquadrant position sensorless control of switched reluctance motors based on on-line modeling[J].Transactions of China Electrotechnical Society,2012,27(7):26-33.
[11]赵德安,郑棐,全力,等.车用开关磁阻电机起动/发电/助力一体化系统研究[J].南京航空航天学报,2008,40(6):825-830.Zhao Dean,Zheng Fei,Quan Li,et al.Switched reluctance motor for integrated starter alternator driver system of vehicles[J].Journal of Nanjing University of Aeronautic &Astronautics,2008,40(6):825-830.
[12]杨岳峰,张奕黄,王素杰,等.基于简化磁链模型的SRG 自励发电[J].电工技术学报,2009,24(1):61-64.Yang Yuefeng,Zhang Yihuan,Wang Sujie,et al.Self-excited SRG based on simplified flux-link age model[J].Transactions of China Electrotechnical Society,2009,24(1):61-64.
[13]梁得亮,丁文,鱼振民.基于自适应网络模糊推理系统的开关磁阻电机建模方法[J].中国电机工程学报,2008,28(9):86-92.Liang Deliang,Ding wen,Yu Zhenming.Modeling for switched reluctance motor based on adaptive network-based fuzzy inference system[J].Proceedings of the CSEE,2008,28(9):86-92.
[14]丁文,梁得亮.双通道开关磁阻起动/发电机系统建模与仿真[J].电机与控制学报,2011,15(5):7-15.Ding Wen,Liang Deliang.Modeling and simulation of dual-channel switched reluctance starter/generator system[J].Electric Machines and Control,2011,15(5):7-15.
[15]肖丽,孙鹤旭,董砚,等.四相开关磁阻电机功率变换器故障检测技术[J].电工技术学报,2014,29(1):156-164.Xiao Li,Sun Hexu,Dong Yan,et al.Fault diagnosis strategy of power converter for four-phase switched reluctance motor[J].Transactions of China Electrotechnical Society,2014,29(1):156-164.
[16]芦刚,李声晋.改善开关磁阻ISG 性能的控制策略研究[J].航空学报,2003,24(5):443-446.Lu Gang,Li Shengjin.Control strategies for switched reluctance integral starter generator[J].Acta Aeronautica Et Astronautica Sinica,2003,24(5):443-446.
[17]赵楠,葛宝明.基于双DSP 的磁浮开关磁阻电机全数字控制器[J].电力自动化设备,2007,27(12):65-67.Zhao Nan,Ge Baoming.Dual-DSP digital controller of magnetic suspending switched reluctance motor[J].Electric power Automation Equipment,2007,27(12):65-67.
[18]Schmidt K,Schmidt E G.Systematic message schedule constructionfor time-triggered CAN[J].IEEE Transactions on Vehicular Technology,2007,56(6):3431-3441.
[19]Davis R I,Burns A,Bril R J,et al.Controller area network (CAN) schedulability analysis:Refuted,revisited and revised[J].Real-Time Systems,2007,35(3):239-272.
[20]Tindell K,Burns A.Guaranteeing message latencies on controller area network[C]//Proceedings of 1st International CAN Conference,Wiesbaden,Germany,1994:2-11.
[21]Tindell K,Burns A,Wellings A J.An extendible approach for analysing fixed priority hard real-time systems[J].Journal of Real-Time Systems,1994,6(2):133-152.
猜你喜欢
防爆电机(2021年4期)2021-07-28 07:42:46
自动化仪表(2020年10期)2020-11-13 03:31:00
计算机应用与软件(2017年8期)2017-08-12 12:22:06
电子设计工程(2017年20期)2017-02-10 03:40:05
信息安全与通信保密(2016年2期)2016-09-08 10:32:03
船舶力学(2015年6期)2015-12-12 08:52:20
电机与控制应用(2015年1期)2015-03-01 03:49:08
汽车维护与修理(2014年10期)2014-02-28 12:15:01
河南科技(2014年23期)2014-02-27 14:19:00
郑州大学学报(工学版)(2013年1期)2013-09-13 07:57:54