内嵌式永磁同步电机改进型解耦控制
2015-11-25 09:30吴荒原王双红辜承林邵可然孙剑波
电工技术学报 2015年1期
吴荒原 王双红 辜承林 邵可然 孙剑波
(华中科技大学强电磁工程与新技术国家重点实验室 武汉 430074)
1 引言
内置式永磁同步电机(IPMSM)永磁体埋入转子内部,其转子机械强度高,可靠性高,另外IPMSM具有磁阻转矩,可以利用磁阻效应来提高恒转矩性能和扩展恒功率范围,同时IPMSM 具有高功率密度和高效率,这些特点使得IPMSM 广泛应用于电动汽车和工业牵引领域。IPMSM 不能直接控制转子磁链大小,但可以通过调整电枢电流来削弱气隙磁场,这种控制模式称为弱磁控制。弱磁控制的研究始于20 世纪80 年代中期,并于90 年代初形成了完善的弱磁理论。由于永磁同步电机的参数变化导致电流规划困难,学者们一直在研究弱磁控制策略,以期达到IPMSM 系统保持高性能的目的。目前国内外所有的弱磁理论研究中,弱磁控制算法都基于准确的参数模型,如磁链、电感、电阻等参数[1]。而实际应用中由于饱和效应的影响,电机在不同负载和转速条件下,其参数会发生变化,特别是电感参数受电流影响较大。从永磁同步电动机的数学模型来看,它具有非线性及变量耦合的特点,要使IPMSM 系统保持高性能,精确的电流轨迹控制至关重要。在高精度轨迹跟踪的场合,需要对这种具有非线性和变量耦合特点进行处理[2]。
至今为止,PI 控制器以其简易性、鲁棒性等优点仍广泛应用于永磁交流电机驱动,但内嵌式永磁同步电机其d 轴电流不为零,因此其PI 制器是一个非线性,多输入的耦合系统,在IPMSM 控制系统中,传统PI 电流控制器的性能难以提升,为了提高PI 控制器的性能,文献[3-7]设计了电流解耦控制器,并提出要进行电流解耦,必须进行准确的参数辨识。
目前参数辨识主要有离线测量和在线检测两种方法,但是离线检测法需要大量的实验数据[8,9],并且控制对象单一,算法不适合移植,为了保证参数在线辨识的准确性和鲁棒性,文献[10]提出了最小二乘法,这种方法能预先估计参数,改善了参数在线辨识的性能,但其抗噪声干扰能力较弱。文献[11-13]采用模型参考自适应方法,改进了参数在线辨识策略,提高了检测鲁棒性,但其算法较为复杂。
文献[14-16]设计了两种传统型PI 控制器,在此基础上详细推导出了解耦控制的条件和方式,并通过零极点的配置来设计控制器,但这种方法在低速时的幅频响应特性不好。文献[17-20]分析了参数与电机调速性能与效率的关系,并提出了对应的解决方法,但是方法通用性不强,不适于移植。
本文提出了一种IPMSM 参数在线辨识算法,该算法形成闭环反馈,并加恒定量型前馈,使其具有良好的稳态及动态性能,基于此种辨识算法,设计了一种改进型电流解耦控制器,并分析了参数辨识误差对此种电流解耦控制器幅频特性的影响,可以看出,该解耦控制器在整个恒转矩区及恒功率区范围内都具有优异的幅频特性。仿真及实验表明了本文方法能有效地提升PI 控制器的性能,改善了系统的静态及动态性能,实验结果表明系统在动态情况下速度无超调,在负载突变情况下,电机转速能迅速稳定且无扰动现象,在静态稳定过程中转矩脉动小。
2 IPMSM 数学模型及控制理论
2.1 数学模型
假设内置式永磁同步电机具有正弦反电动势,那么在转子同步旋转d-q 坐标系中,IPMSM 电机的数学模型为
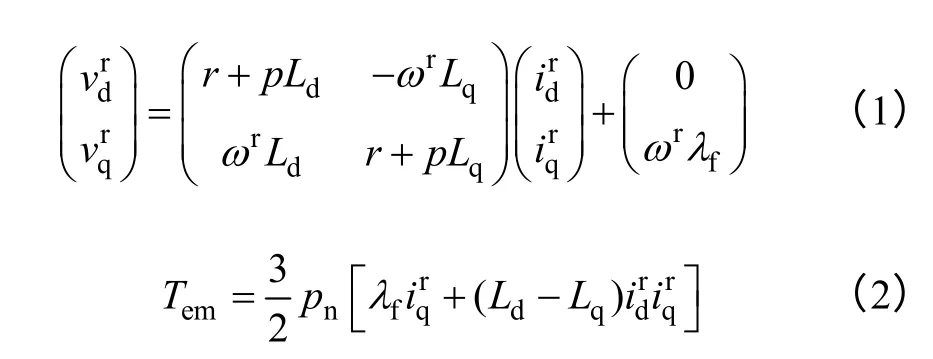
2.2 恒转矩区控制
由于IPMSM 存在凸极比,具有磁阻转矩,因此可以合理利用磁阻转矩。目前研究中,普遍采用最大转矩电流比控制(MTPA),使相同电流幅值条件下,能获得最大转矩。此时d-q 轴电流矢量应满足方程
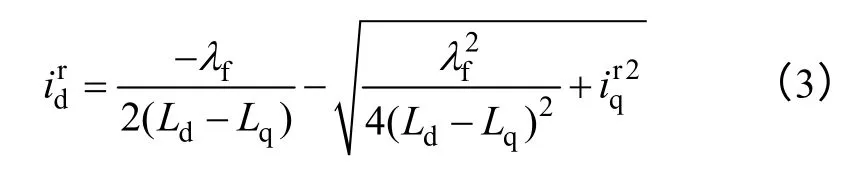
实际应用于微处理芯片时,精确的MTPA 数学模型难以在DSP 及其他控制器中实现,可以利用麦克劳林级数将方程(3)展开为

代入表2 中的样机参数可知,虽然iq阶数增加,但相应项的值却在急剧减小,四阶以上多项式和只占总值的0.3%,因此,d-q 轴电流关系可以简化为

2.3 恒功率区控制
在高速运转下的IPMSM 系统,其转速受到反向电动势的限制,当速度大于基速时,若不采取弱磁控制,电流控制器会出现饱和失控现象。在满足电流及电压限制的弱磁控制中,忽略定子绕组压降,电流id和iq应满足方程

与恒转矩区一样,可以简化电流控制器的设计。首先定义ωcλf=vmax,然后将定义速度标幺值的形式为ωpu=ω/ωc,与恒转矩区一样,利用麦克劳林级数展开,忽略高阶电流多项式,可得恒功率区电流方程为
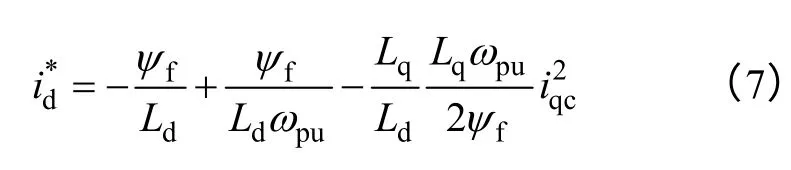
图1 中,简化MTPA 及弱磁曲线可以很好地拟合基准曲线,大大减小微处理器的计算量。

图1 IPMSM 电流控制轨迹Fig.1 Current trajectory of the IPMSM
3 参数在线辨识策略
3.1 辨识算法
由图 1 可以看出,由于电感参数变化,实际MTPA 及弱磁曲线与理想方程出现偏离,因此精确实时的电感参数,对IPMSM 系统性能改进有重要作用。文献[14]对比了三种电感辨识方法,其分析指出,模型参考自适应控制(MRAC)方法易于实现,在永磁磁链较为稳定的情况下,其结果是准确可靠的。在实际应用中,控制系统检测周期非常短,因此在一个检测控制周期中,可认为电机处于稳状,其电流变化率为零,从而忽略导数项,得出参数辨识方程为

基于模型参考自适应的参数在线检测策略如图2所示,计算方法基于方程式(8)和式(9),但应用中必须加入其他环节。由于应用系统中采用SVPWM电压模式,因此算法中加入低通滤波器,以减少高频电压噪声对参数辨识的干扰,为改进电机起动时或动态时的参数检测的可靠性,加入PI 控制器,形成闭环系统,为改善参数辨识过程中的动态性能,加入额定状态下恒定参数Ldrate、Lqrate进行前馈处理。
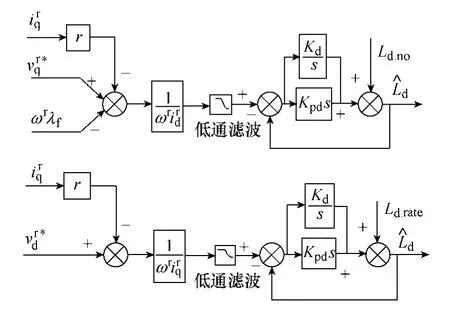
图2 参数在线检测策略Fig.2 On-line parameter estimation strategy
3.2 算法分析
方程式(8)、式(9)中包含永磁磁链及电阻参数,在永磁电机控制系统中,一般都假设永磁磁链和电阻恒定,但实际系统中磁链和电阻参数都受到温度变化影响,由辨识方程可知,在低速区或低转矩区,电阻上的压降和耦合项Lqωriq,ωrλf对参数辨识影响不大,但是高转矩及高速区时,需要对参数敏感性进行分析。图3 给出了电机额定转速下,电阻及磁链参数变化对参数辨识的影响,为在电流解耦控制器设计中的改进措施提供依据。由图可以看出在低转速输出时,q 轴电感对电阻变化较为敏感,在高转矩区时,则是d 轴电感对电阻变化更为敏感。由于反向电动势及耦合项的影响,相对于电阻而言,电感辨识对磁链参数的变化更为敏感。


图3 额定转速下电感参数在线辨识误差分析Fig.3 Estimation analysis of the inductances at rated speed
3.3 仿真结果
图4 显示的是在PI 控制器中加入前馈措施后,与无前馈q 轴电感参数辨识过程对比。由图4 可知,当无前馈处理时,虽然稳态过程中其准确度一致,但是其动态性能不足,因此,在动态条件下无前馈处理时,参数辨识会出现误差。
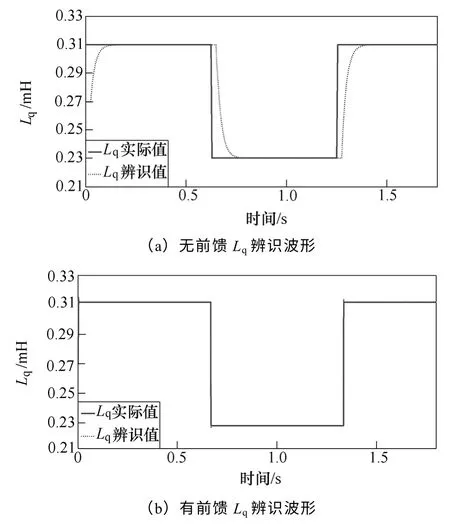
图4 参数在线辨识仿真对比Fig.4 Simulation of the online estimation
4 电流解耦控制器设计
由表1 可知,随着速度的升高,系统耦合电压将在方程中占据越来越多的比重。因此电流解耦控制器的设计性能对要求恒功率范围宽的IPMSM 控制系统尤为重要。本文所设计的电流解耦控制器由图5a,5b 发展而来,图5a是由Jinhwan Jung[16]提出的一种复合结构解耦控制器,这种解耦方法的设计模型不基于电机参数,具有很强的鲁棒性,但是其解耦控制性能较差,其参考电压方程为

式中

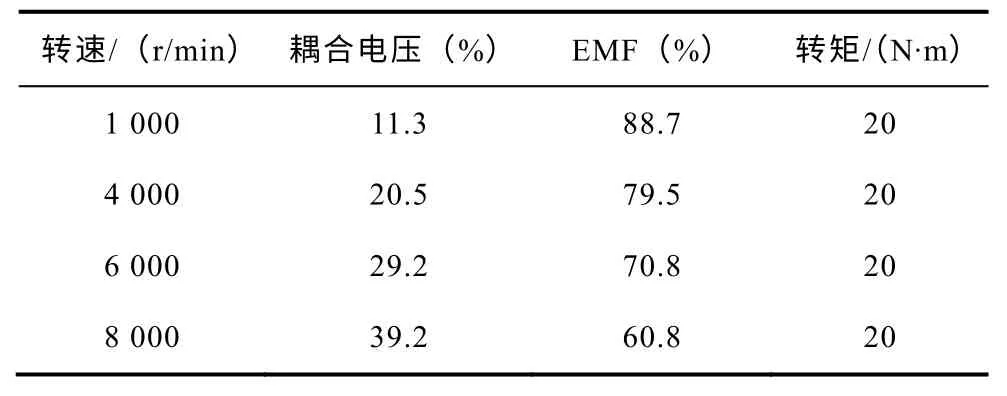
表1 转速对应相对电压值Tab.1 Voltage components versus speed
随着微型处理器计算速度的发展,参数在线辨识越来越广泛的应用到了IPMMS 电流解耦控制器中,Hyunbae Kim[17]利用参数辨识算法设计的控制器框图如图5b 所示,与图5a相比,系统需要参数能够精确的辨识,因此提高了电流解耦控制器的性能。其电压给定方程为

本文提出的改进型电流解耦控制器的控制框图如图5c 所示,添加了两个PI 控制器来补偿当转矩输出较大时,电阻上压降变化对电感参数辨识带来的影响,更进一步利用前馈来改进电流解耦控制器的性能,其电压给定方程为

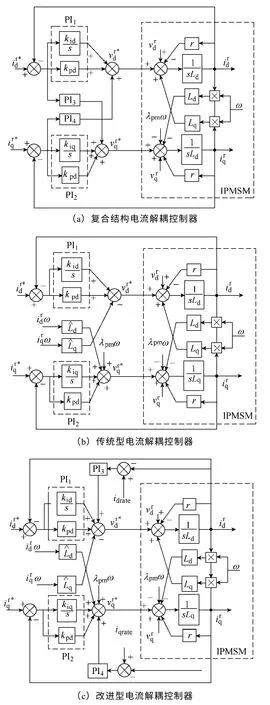
图5 电流解耦控制器框图Fig.5 Block diagram of the current decoupling controller
电流解耦控制器的设计基于参数辨识,因此电感参数辨识所出现的误差也必须进行考虑,系统的传递函数应考虑参数辨识的误差,根据设计的系统框图,图5c 可得出所设计的电流解耦控制器的传递函数为

IPMSM 控制系统中,解耦控制器的幅频响应特性是检验控制器性能的一个重要指标,图5 显示的是在同步坐标系中,电流解耦控制器的频域响应轨迹,对比了电流解耦控制器与非解耦控制器,传统型解耦控制器与改进型解耦控制器的频域响应,对比了两种电流解耦控制器当参数辨识出现误差时各自的频域响应。考虑样机的转速范围,分析时设定中心频率为600Hz,由图6a 可以看出,对于传统型解耦控制器,当电感参数能够精确辨识时,电流控制器的幅频响应特性平稳,衰减速度较慢,即使在参数不能精确辨识的情况下,控制器的增益也能保持较好特性,但与准确参数模型下的幅频响应对比,会出现增益下降现象,而非解耦控制器其幅频特性则明显较差,有超调现象,并且在整个频率范围内衰减较快。从图6b 可以看出,改进型电流解耦控制器进一步改善了由于参数辨识误差引起的增益下降现象,由幅频响应曲线可知,系统在整个频率区间内都具有良好的幅频响应特性,由于参数辨识引起的误差对其频域特性几乎没有影响。
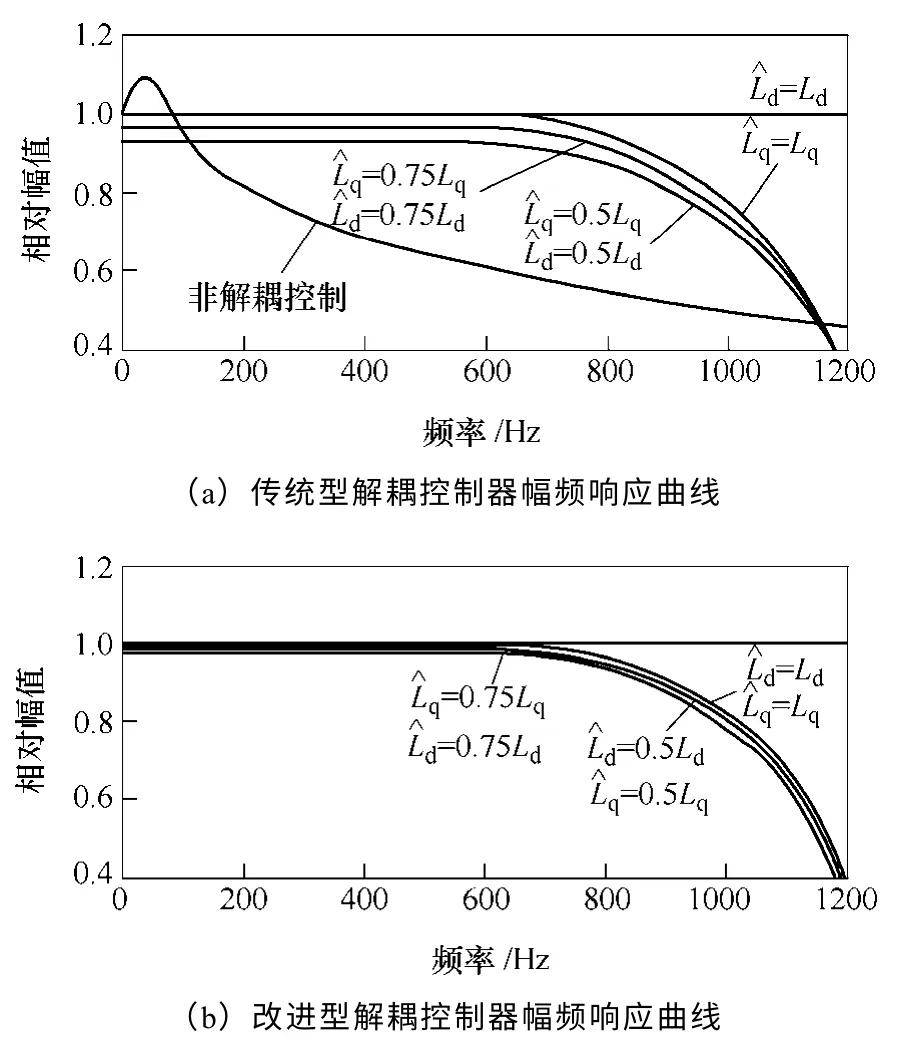
图6 电流解耦控制器幅频应响曲线Fig.6 Frequency responsecurve of the current decoupling controller
5 实验
本文分别通过仿真和实验验证了基于参数在线辨识的电流解耦控制器性能。利用TI 公司DSP 芯片TMS28335为处理器,制作了50kW 样机的控制器,样机参数见表2。实验系统平台如图7 所示。系统中电流电压采样频率为20kHz,采用CAN 总线向上位机发送电流,电压及速度信号,为保证数据的实时性,CAN 总线传输速率选择1Mbps,实验波形数据由dSpace 提供。系统采用的控制框图如图8所示。

表2 IPMSM 样机参数Tab.2 Parameters of the test IPMSM

图7 内嵌式永磁同步电机实验平台Fig.7 Experimental setup of the IPMSM drive

图8 系统控制框图Fig.8 Block diagram of the proposed control system
在仿真模型中,设定电感参数以方波形式发生变化,由图4 可以看出,当电感在类似方波极端变化条件下,所提算法在d-q 轴电感辨识中仍有很好的动态性能和静态性能,能快速稳定地跟踪电感参数。图9 所示的是电感参数离线实验测量及在线参数辨识的对比,其结果显示,在整个电流范围内,所提方法能准确的辨识d-q 轴电感。
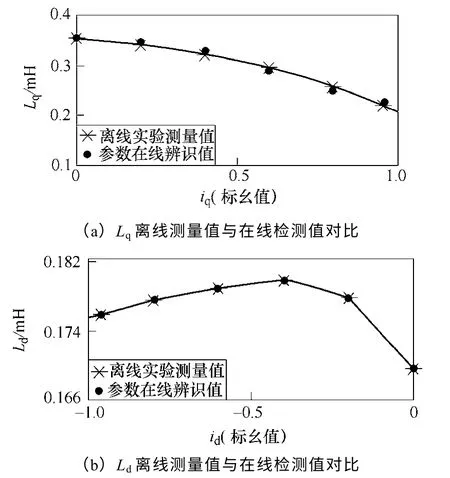
图9 电感离线测量值与在线检测值对比Fig.9 Comparison of the inductance for on-line parameters estimation and off-line scheme
图10a是样机带载25N,给定速度为额定转速4 000r/m 时,电机的起动过程,在第3s 时,系统负载突变至65N。由图10a 可以看出,系统转速平稳,能准确跟踪给定指令,且无超调现象,即使在第3s负载突变的情况下,系统能迅速的稳定速度,没有速度扰动现象,由图10b 可以看出系统转矩输出稳定脉动小。由图10c 和图10d 可以看出,随着d-q 轴电流的变化,系统能准确辨识出当前电阻值,其中Lq变化范围较大,Ld变化范围较小。从图10e 可以看出,在恒功率区,转速为7 000r/min 时,系统仍然没有出现超调现象,且在负载突变情况下速度保持平稳。图10f 给出了未采用解耦控制时带载40N,给定速4 000r/min 时的速度曲线,与图10a 及10b对比可以看出未采用电流解耦控制时,其速度曲线出现超调现象,且加速及稳定过程中转矩脉动现象较为明显。
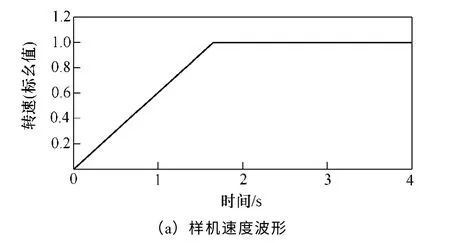

图10 样机实验波形Fig.10 Experimental response of the proposed scheme for the test IPMSM
6 结论
本文在传统的模型参考自适应的基础上,改进了参数在线辨识的前馈及反馈性能,对两种辨识策略做出了仿真对比,并通过离线实验测量证明了此种方法的正确性,基于此种参数在线辨识策略,设计了一种应用于IPMSM 系统的改进型电流解耦控制器。经实验证明,此种电流解耦控制器应用于IPMSM 系统时,具有优异的调速性能,且加速过程平稳,无超调现象,在负载突变的情况下速度能迅速平稳,无扰动现象。本文所提控制策略适合应用于永磁磁链较稳定,但电感参数变化较大的IPMSM系统,此种控制方式算法简单,易于实现,鲁棒性强,同时具有良好的动态性能。
[1]Morimoto S,Sanada M.Wide-speed operation of interior permanent magnet synchronous motors with highperformance current regulator[J].IEEE Transactions on Industry Applications,1994,30(4):920-926.
[2]Yu Seok,Jun Young Lee.Adaptive flux observer with on-line inductance estimation of an interior PMSM considering magnetic saturation[J].Journal of Power Electronics,2009,9(2):188-197.
[3]Cheng B,Tesch T R.Torque feed forward control technique forpermanent-magnet synchronous motors[J].IEEE Transactions on Industrial Electronics,2010,57(3):969-974.
[4]Underwood,S J Husain I.Online parameter estimation and adaptive control of permanent magnet synchronous machines[J].IEEE Transactions on Industrial Electronics,2010,57(7):2435-2443.
[5]Rahman M A,Milasi R M,Lucas C.Implementation of emotional controller for interior permanent-magnet synchronous motor drive[J].IEEE Transactions on Industry Applications,2008,44(5):1466-1476.
[6]Jinhwan Jung,Kwanghee Nam.A dynamic decoupling control scheme for high speed operation of induction motors[J].IEEE Transactions on Industrial Electronics,2002,46(1):100-110.
[7]Huangyuan Wu,Shuanghong Wang,C L Gu.Simplified fuzzy logic based flux weakening speed control of IPMSM drive[C].Proceedings of IEEE Conference on Electrical Machines and Systems,Beijing,China,2011.
[8]Yukinori Inoue,Koji Yamada,Shigeo Morimoto,et al.Accuracy improvement of IPMSM sensorless drives with on-line parameter identification[C].Power Conversion Conference,Nagoya,Japan,2007:860-866.
[9]Sugimoto H,Tamai S.Secondary resistance identification of an induction-motor applied model reference adaptive system and its characteristics[J].IEEE Transaction on Industry Applications,1987,23(2):296-303.
[10]Rajendra,Shrestha L,Seok Jul Ki.Online compensation of parameter variation effects for robust interior PM synchronous motor drives[J].Journal of Power Electronics,2011,5(11):713-718.
[11]Reyes M Velez,Verghese G C.Subset selection in identification,and application to speed and parameter estimation for induction machines[C].Proceedings of IEEE Conference on Control Applications,Albany NY,1995:991-997.
[12]Kwon T S,Sul S K.Novel antiwindup of a current regulator of asurface-mounted permanent-magnet motor for flux-weakening control[J].IEEE Transactions on Industrial Electronics,2006,42(5):1293-1300.
[13]Dutta R,Rahman M F.A comparative analysis of two test methods of measuring dq-axes inductances of interior permanent magnet machine[J].IEEE Transactions on Magnetics,2006,42(11):3712-3718.
[14]Cheol Jo,Ji Yun Seol,In Joong Ha.Flux-weakening control of IPM motors with significant effect of magnetic saturation and stator resistance[J].IEEE Transactions on Industrial Electronics,2008,55(3):1330-1340.
[15]Jinhwan Jung,Sunkyoung Lim,Kwanghee Nan.PI type decoupling control scheme for high speed operation of induction motors[C].28th Annual IEEE Power Electronics Specialists Conference,St.Louis,America,1997:1082-1085.
[16]Kim H,Lorenz R D.Improved current regulators for IPM machine drives using on-line parameter estimation[C].IEEE IAS Annual Meeting,Pittsburgh,PA,USA,2002:86-91.
[17]杨书生,钟宜生.永磁同步电机转速伺服系统鲁棒控制器设计[J].中国电机工程学报,2009,29(3):84-90.Yang Shusheng,Zhong Yisheng.Robust controller design for PMSM speed servo systems[J].Proceedings of the CSEE,2009,29(3):84-90.
[18]尹华杰,林金铭,金振荣.弱磁型永磁同步电机参数与调速特性的关系研究[J].电工技术学报,1997,12(1):24-28.Yin Huajie,Lin Jinming,Jin Zhenrong.Effects of parameters on variable speed characteristic of permanent magnet synchronous machine for flux weakening operation[J].Transactions of China Electrotechnical Society,1997,12(1):24-28.
[19]安群涛,孙力,赵克.一种永磁同步电机参数的自适应在线辨识方法[J].电工技术学报,2008,23(6):31-36.An Quntao,Sun Li,Zhao Ke,An adaptive on line identification method for the parameters of permanent maget synchronous motor[J].Transactions of China Electrotechnical Society,2008,23(6):31-36.
[20]许家群,朱建光,刑伟,等.电动汽车驱动用永磁同步电动机系统效率优化控制研究[J].电工技术学报,2004,19(7):81-86.Xu Jiaqun,Zhu Jianguang,Xing Wei,et al.Study of efficiency optimization control of permanent magnet synchronous motor drives for electric vehicle[J].Transactions of China Electrotechnical Society,2004,19(7):81-86.
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
光学精密工程(2016年3期)2016-11-07
电测与仪表(2016年10期)2016-04-12
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
大电机技术(2015年5期)2015-02-27
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年11期)2014-04-04
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28