
三相异步电动机三种起动方式的比较研究
2015-11-24 01:52李一鸣万军华
湖南理工学院学报(自然科学版) 2015年1期
荣 军,李一鸣,万军华,张 敏,陈 曦
(1.湖南理工学院 信息与通信工程学院,湖南 岳阳 414006; 2.湖南理工学院 计算机学院,湖南 岳阳 414006; 3.工程车辆轻量化与可靠性技术湖南省高校重点实验室,长沙 410014 )
三相异步电动机三种起动方式的比较研究
荣 军1,3,李一鸣2,3,万军华1,3,张 敏1,3,陈 曦1,3
(1.湖南理工学院 信息与通信工程学院,湖南 岳阳 414006; 2.湖南理工学院 计算机学院,湖南 岳阳 414006; 3.工程车辆轻量化与可靠性技术湖南省高校重点实验室,长沙 410014 )
研究了三相异步电动机直接起动、定子串电阻起动以及软起动三种起动方式的工作原理,从理论上分析了它们各自起动电流和转速的工作特性,接着在MATLAB/SIMULINK中对这三种起动方式进行了建模与仿真.最后通过对仿真结果的比较分析可知,相比较直接起动和定子串电阻起动方式,软起动能够明显减小起动电流,而且在转速方面,软起动使转速变化更加平缓.
异步电动机; 直接起动; 串电阻起动; 软起动
引言
现代社会中,电动机的应用随处可见,在各个行业都起着十分重要的作用,要使电机实现它的价值,必须使它有一个良好的起动.直接起动是应用很广泛的一种起动,但是它却存在着很大的缺陷.首先其起动电流非常大,会对电网产生很大的冲击,而且起动电流中带有高次谐波,这样会干扰同一电网的其他设备的正常工作; 其次过大的起动电流会损坏电机甚至对人身安全造威胁.于是有了定子串电阻或电抗起动方式、星形—三角形起动方式和自耦变压器起动方式等一些传统的减压起动方式,但是这些起动方式也存在着很多不足.在科技发展迅速的当今世界,一种新的起动方式已孕育而生,软起动是目前最为流行和最为先进的起动方式,它能确保电动机在不同需求的情况下平滑起动,降低了起动电流对电网的冲击,因此,软起动技术的应用具有划时代的意义[1~3].因此本文研究了异步电动机三种起动方式,分别是直接起动,定子串电阻起动和软起动,并在MATLAB/SIMULINK中对它们进行了建模与仿真,仿真结果表明相比于直接启动和定子串电阻起动方式,软起动的起动质量明显较高,为三相异步电动机在工农业生产的应用提供了依据.
1 异步电动机直接起动技术研究
1.1直接起动的工作原理
直接起动顾名思义就是指在不经过限压或者限流的情况下,将电源电压通过连接设备直接加到三相异步电动机的定子绕组上,使电动机在额定电压下完成起动.通常情况下,直接起动时起动电流会超出额定电流的2~7倍,起动转矩也相对比额定转矩要大.根据对我国自产的大部分电动机的实际测量,得出某些三相异步电动机起动电流甚至会超出额定电流的7~11倍之多.直接起动时虽然会产生大于额定电流几倍的起动电流,但是这样大的起动电流持续的时间会很短,随着转子的高速运转之后,起动电流会迅速的减小,只要不太过频繁的起动,就不会导致电机的定子绕组过热.其次只要有足够大容量的电源,并且电动机的起动电流远小于电源的额定电流时,就不会有明显的供电不足的情况.另外还得考虑起动转矩的问题,只要起动转矩大于负载转矩时,就能采用直接起动的方法.但是直接起动方法存在着诸多不足.有的电机需要频繁的起动,又因为起动电流很大,从而可能烧坏电机.而且起动电流中带有高次谐波,对电网有很大的冲击作用.一般情况下,功率小于7.5kW的异步电动机可以采用直接起动的方法.当功率大于7.5kW时,只要电源容量满足下面公式,电动机也可采用直接起动的方法[4,5].

1.2直接起动在MATLAB/Simulink中的建模与仿真
异步电动机定子串电阻减压起动的仿真模型是由三相正弦电源模块、三相交流电机模块、阶跃信号模块、电动机测量模块、示波器以及放大器模块组成,如图1所示[8].
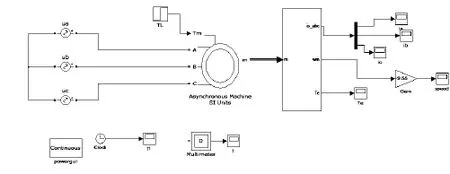
图1 异步电动机直接起动的仿真模型
异步电动机直接起动仿真结果如图2和图3所示,其中图2 为直接起动电流仿真波形,图3为直接起动转速仿真波形.从图2可以看出,采用该方法起动时,电机的起动电流很大,其峰值达到了100A左右,这对电机的冲击非常大,对电机的使用寿命会有影响.再从起动到稳定运行的整个过程来看,中间有段时期的电流变化比较剧烈,这对电机也会造成一定的损害; 从图3可以看出,电机非常迅速地达到了额定转速,仅需0.3s的时间,但是过大的加速度对电机的机体有一定的损害.
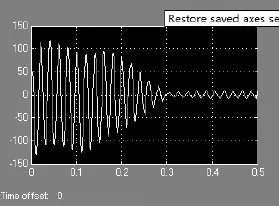
图2 电机直接起动的电流仿真波形
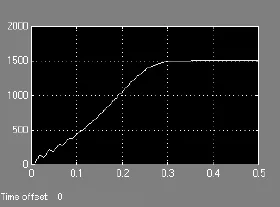
图3 电机直接起动的转速仿真波形
2 异步电动机定子串电阻起动技术研究
2.1定子串电阻起动的工作原理
定子串电阻起动实际上就是减压起动,是在起动时想办法降低电动机定子绕组上的电压,当完成起动过程后,再加以额定电压使其正常运行.定子串电阻起动时在减小起动电流的同时也会使起动转矩减小.因此,定子串电阻起动的采用只存在电机的轻载或空载这两种情况[6].
定子绕组串电阻这种方法很简单,就是在三相电源与电机定子绕组之间串接一定阻值的电阻,在电阻的分压作用下,降低了电机定子绕组上的电压.由异步电动机的等效电路可知:起动电流与定子绕组的电压成正比,因而定子绕组串电阻可以减小起动电流.但又考虑到起动转矩正比于定子绕组电压的平方,从而电机的起动转矩会有较大的减小.因此,这种起动方法仅仅适用于空载或轻载起动场合.
由于定子直接串接的电阻,所以会有很大一部分的电能消耗在其上面,因此仅仅适用于低压的小功率电动机.如图4所示:当起动电机时,开关KM1闭合,而开关KM2处于断开状态,这样便使电阻R串接在电源与定子绕组之间.当电机完成起动后,闭合开关KM2,这时电阻R短路,于是电机处在全压状态进行工作.
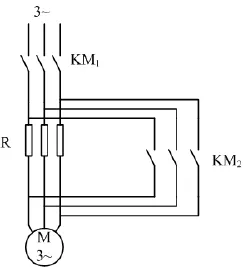
图4 定子串电阻或电抗起动原理图
2.2定子串电阻在MATLAB/Simulink中的建模与仿真
异步电动机定子串电阻起动的仿真模型如图5所示[8],主要由三相正弦电源模块、电阻模块、三相交流电机模块、交流电机模块、阶跃信号模块、电动机测量模块、示波器以及放大器模块组成.在模型中,有一个关键问题,就是定子串接的电阻的大小必须合适,这个可以根据实际要求而定.如果串接的电阻过小则它的分压很小,在启动时会导致起动电流过大,超过其额定电流时,则有可能会使电机烧坏; 如果串接的电阻过大,那么电动机两端的电压就会过低,这会使得电机的起动电压不足,从而使得电机不能运转.因此必须准确算出电阻的阻值.
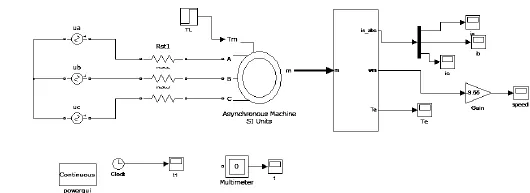
图5 异步电动机定子串电阻起动的仿真模型
异步电动机定子串电阻起动仿真结果如图6和图7所示,其中图6 为定子串电阻起动电流仿真波形,图7为定子串电阻起动转速仿真波形.从图6可以看出,交流电动机的起动电流与直接起动相比,有了较为明显的减小,其峰值在50A左右,可以有效的防止起动电流过大导致电机被烧坏,但是从起动到稳定运行的整个过程来看,中间有段时期的电流变化比较剧烈,这对电机也会造成一定的损害; 从图7可以看出,电机达到额定转速的时间相对很短,整个起动过程中转速的变化比较快,从起动到稳定运行的过程中变化平稳.
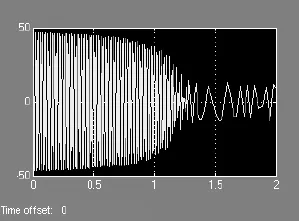
图6 异步电动机定子串电组起动的电流仿真波形
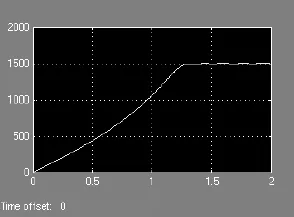
图7 异步电动机定子串电阻起动的转速仿真波形
3 异步电动机软起动技术研究
3.1软起动的工作原理
异步电动机软起动是在电动机的起动过程中,通过自动调节电动机的电压,使用户得到期望的起动性能.异步电动机软起动的实现就是通过交流异步电动机的一种控制装置,它能实现电动机的软起动、软制动以及电动机的轻载节能运行,并且具有多种保护功能.它串接在电动机的定子和三相电源之间,利用其内部晶闸管的特性,对其输出电压进行调控,从而使电机输入电压呈线性增长最终达到额定电压,其工作原理如图8所示[7].
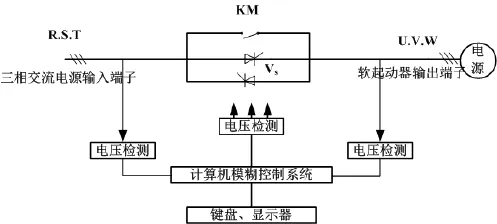
图8 异步电动软起动的工作原理
3.2软起动在MATLAB/Simulink中的建模与仿真
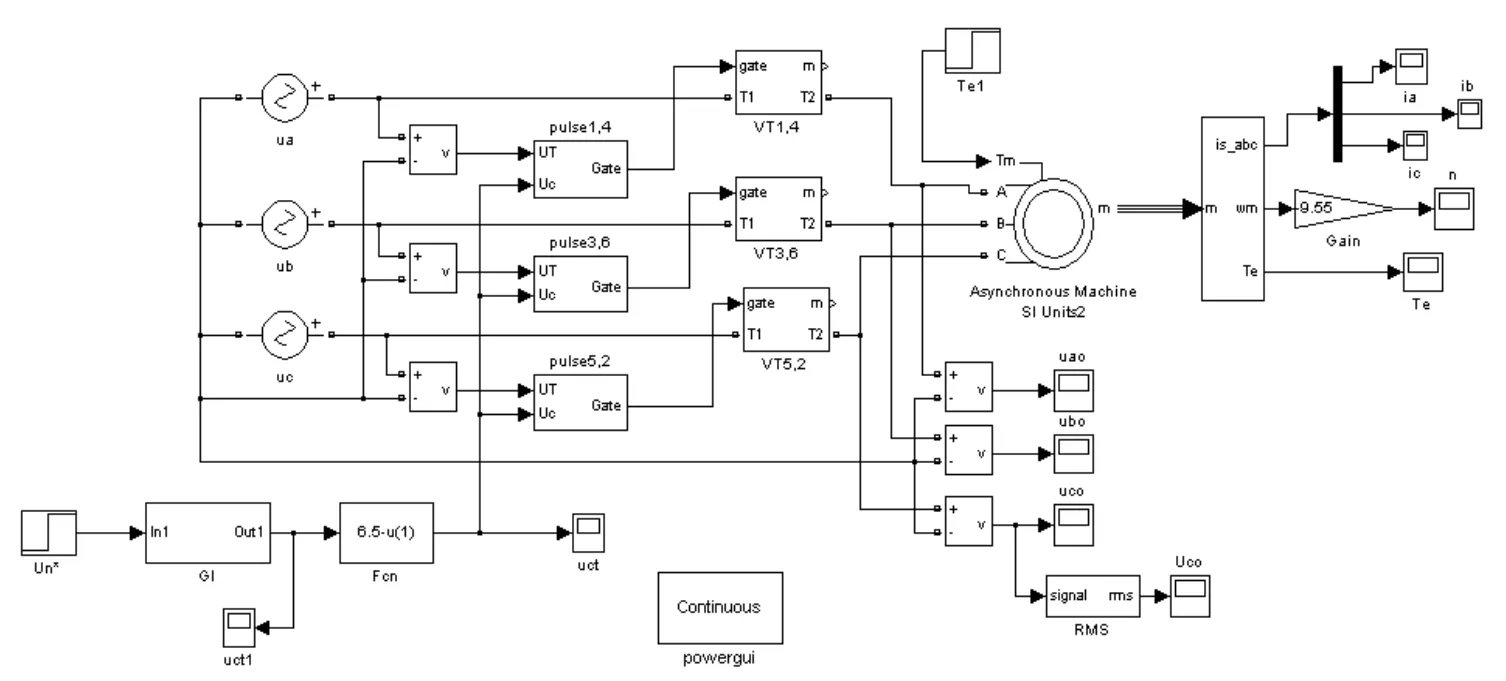
图9 异步电动机软起动的仿真模型
图9是交流电动机减压软起动器的仿真模型[8],由三相电源模块、异步电动机模块、 三相晶闸管调压模块、给定积分器模块、触发器模块、多路检测仪模块、放大器模块、电压和电流测量模块、示波器和控制部分组成,其中控制部分包括放大器模块、阶跃信号模块、函数匹配环节等部分组成.在图9所示的仿真模型中,非常关键的两个部分.一是控制部分,由step模块发出阶跃信号作为起动信号,给定积分器GI用来设定起动曲线,而函数匹配环节Fcn使控制信号和触发器pulse输入信号相匹配.其中给定积分器GI中的限幅器是用来设置积分时间常数的,通过改变限幅器的上下限来改变积分器的输出曲线的上升斜率.二是三相晶闸管调压电路部分,三相晶闸管调压器负责为异步电动机提供电压,当晶闸管的控制角比较大时,会使得三相晶闸管调压器的输出电压过低,从而使异步电动机的起动转矩过小,终使得电机难以起动; 反之,当晶闸管的控制角比电动机的功率因数角小时,会使三相晶闸管调压器不能调压,因此其输出的便是全电压.
异步电动机直接起动仿真结果如图10~12所示,其中图10为异步电动机软起动输入电压仿真波形,图11为异步电动机软起动电流仿真波形,图12为异步电动机软起动转速仿真波形.从图10可以看出,采用软起动方式,电动机在前一段时间以150V左右的电压起动运行,达到稳定运行后,以全电压供电运行; 从图11可以看出,在电机电流方面,起动电流相对很小,其峰值在20A左右,从起动至稳定运行的整个阶段,电流变化都比较平缓,这样便可以防止起动电流过大导致电机被烧坏的情况; 从图12可以看出,从电机的转速方面看,采用软起动方式,电机达到额定转速的时间相对要长,但是整个起动过程更加平缓.
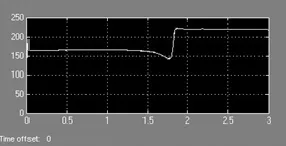
图10 异步电动机软起动输入电压仿真波形
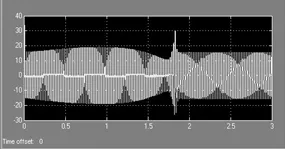
图11 异步电动机软起动电流仿真波形
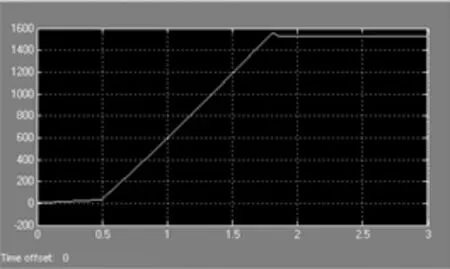
图12 异步电动机软起动转速仿真波形
4 结束语
本文分析了三相异步电动机三种起动方式的工作原理,并在MATLAB/Simulink中对三种起动方式进行了建模与仿真,最后对仿真结果进行了分析,仿真结果表明直接起动电动机有非常大的起动电流,而且转速在非常短的时间达到额定转速,对电机的损害是非常大的,而定子串电阻起动相比较直接起动,起动电流明显下降,电机转速达到额定时间延长.最后电动机采用软起动,起动电流更小,而转速在整个运行过程中更加平稳.
[1] 唐 介.电机与拖动[M].北京:高等教育出版社,2007
[2] 彭鸿才.电机原理及拖动[M].北京:机械工业出版社,2001
[3] 曹承志.电机、拖动与控制[M].北京:机械工业出版社,2001
[4] 王 颖.中压电动机传统起动方式的危害性[J].大电机技术,2004,4(1):42~45
[5] 任宇飞.感应电机软起动新技术[D].武汉:华中科技大学硕士论文,2005
[6] 赵相宾,刘国林.变频调速和软起动技术的现状和发展[J].自动化博览,2000,13(4):1~4
[7] 徐甫荣,崔 力.交流异步电动机软起动及优化节能控制技术研究[J].电气传动自动化,2003,25(1):1~7
[8] 洪乃刚.电力电子、电机控制系统的建模和仿真[M].北京:机械工业出版社,2006
The Comparative Study of Three Kinds of Starting Way for Three-Phase Asynchronous Motor
RONG Jun1,3,LI Yi-ming2,3,WAN Jun-hua1,3,ZHANG Min1,3,CHEN Xi1,3
(1.College of Information and Communication Engineering,Hunan Institute of Science and Technology,Yueyang 414006,China; 2.College of Computer Science,Hunan Institute of Science and Technology,Yueyang 414006,China; 3.Key Laboratory of Lightweight and Reliability Technology for Engineering Vehicle,Changsha 410014,China)
The paper studies the working principle of direct starting,series resistance starting of stator and soft starting for three-phase asynchronous motor,and analyzes the working characteristic of starting current and starting speed theoretically ,then the paper makes modeling and simulation for three methods for starting based on MATLAB/SIMULINK.Finally,the paper makes the comparing analysis for the simulation results,and compared with direct starting and series resistance starting of stator,soft starting can significantly reduce the starting current,and in terms of speed,soft starting can make the speed change more smoothly.
asynchronous motor; direct starting; series resistance starting; soft starting
TM46
A
1672-5298(2015)01-0050-05
2014-10-19
工程车辆轻量化与可靠性技术湖南省高校重点实验室基金资助(2014kfjj01)
荣 军(1978- ),男,湖南岳阳人,硕士,湖南理工学院信息与通信工程学院讲师.主要研究方向:电力电子技术
猜你喜欢
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
防爆电机(2020年5期)2020-12-14
哈尔滨铁道科技(2020年4期)2020-07-22
测控技术(2018年2期)2018-12-09
智能建筑电气技术(2015年5期)2015-12-10
智能建筑电气技术(2015年5期)2015-12-10
电测与仪表(2015年12期)2015-04-09
电机与控制应用(2015年10期)2015-03-01
