可伸缩折叠式四旋翼飞行器设计*
2015-11-23 03:05李波陈王红州刘晓栋徐兴国李彦锐
机械研究与应用 2015年2期
李波陈,王红州,刘晓栋,徐兴国,李彦锐
(合肥工业大学机械与汽车工程学院飞行器制造工程系,安徽合肥 230009)
0 引言
四旋翼无人飞行器只需改变四个电机的转速即可实现飞行器的飞行姿态控制,机动灵活[1]。同时四旋翼飞行器具有较高的操控性能,可以在小范围内起飞,悬停,接近目标,具有良好的军事侦察、搜索救援性能。但四旋翼无人飞行器结构外形复杂,不便携带,限制了其在特种侦察,搜索救援等领域的应用。国内外有关四旋翼无人飞行器的研究方向主要倾向于其飞行控制系统的研究,近年来四旋翼控制系统发展已较为成熟,例如:使用ATMEL公司的八位处理器研发的KK四旋翼飞控[2]、采用ATMEGA 328P处理器研制的MWC四旋翼飞控以及国内比较高端的NAZA飞控等,都可以实现四旋翼无人飞行器的起飞、定高定点悬停、巡航、航拍等功能。四旋翼无人飞行器结构外形的发展却较为缓慢,这在一定程度上制约了四旋翼无人飞行器应用领域的推广。
笔者根据四旋翼无人飞行器结构特点和飞行原理的分析,设计出具有空中自动伸缩、着陆后手动折叠功能的四旋翼机体。通过对机体结构受力分析、合理选材并进行强度校核,保证了机体结构合理、可以实现预期功能,最后通过三维建模、模型制作和飞行试验验证了该可伸缩折叠型四旋翼机体的可行性。
1 四旋翼飞行器飞行原理及力学分析
1.1 飞行原理
如图1所示为四旋翼无人飞行器俯视图[3],四旋翼飞行器通过调节四个电机转速大小来改变四个旋翼的升力大小,以此控制飞行器的姿态和位置。
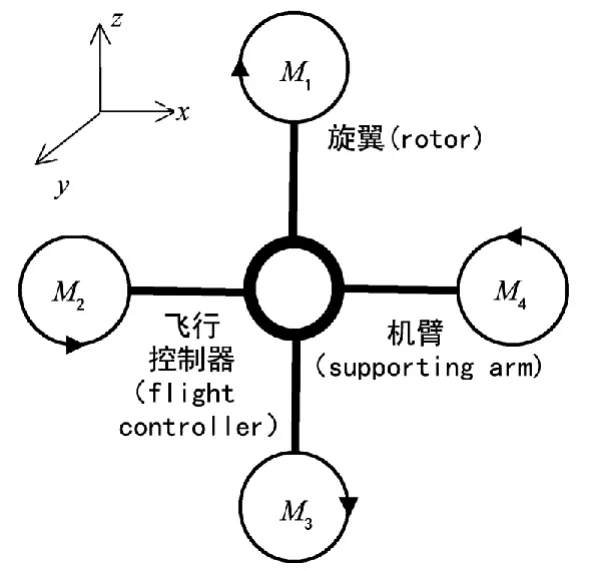
图1 四旋翼飞行器的结构俯视图
(1)垂直运动:保持四个电机转速相同,使四个旋翼总升力与机体重力平衡,四旋翼飞行器处于悬停状态;四个电机同时增加(减少)相同当量的转速,使四个旋翼总升力增加(减少),四旋翼飞行器沿z轴上升(下降)。
(2)偏航运动:同时增加(减少)电机1、3的转速,减少(增加)电机2、4的转速,使旋翼1、3反扭矩大于(小于)旋翼2、4反扭矩,机身绕Z轴逆时针(顺时针)转动,实现四旋翼飞行器的偏航运动。
(3)俯仰运动:保持电机2、4转速不变,同时增加(减小)电机1的转速,减小(增加)3相同的转速,使转速改变量相等,由1、3旋翼产生的不平衡力矩使机身绕x轴转动,实现俯仰运动。
(4)前后运动:在(3)的前倾(后仰)状态下,使飞行器保持一定向前(后)的倾角,则旋翼总拉力产生一个向前(后)的水平分量,带动飞行器在此方向水平向前(后)运动。
(5)滚转运动:保持电机1、3转速不变,同时增加(减小)电机2的转速,减小(增加)电机4的转速,使转速该变量相等,由2、4旋翼产生的不平衡力矩使机身绕y轴转动,实现滚转运动。
(6)侧向运动:与(5)的类似,飞行器在滚转时,会产生水平方向的分量,使飞行器向左侧或者右侧水平飞行。
1.2 悬停状态力学分析
建立如图2所示地面坐标系和机体坐标系[4-5],始状态时,机体坐标系与地面坐标系原点重合。
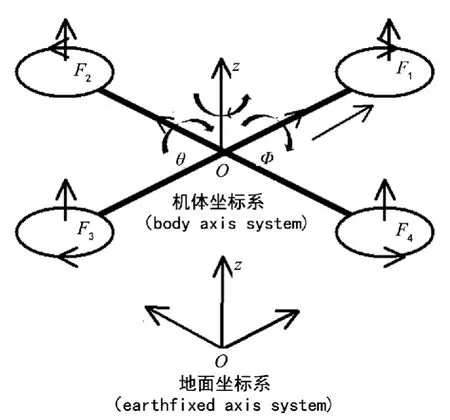
图2 四旋翼飞行器坐标系
机体在地面坐标系下的航向角、俯仰角、横滚角分别记作Φ、θ、ψ,机体坐标系到地面坐标系的变换矩阵R可以写为:

式中:S表示角度Φ的正弦值;Cφ表示角度Φ的余弦值。
对单个旋翼,需要考虑旋翼升力、陀螺仪力矩、旋翼反扭矩和机体总重力。单个旋翼的动力学分析如图3所示。
旋翼升力T、旋翼反扭矩τ与旋翼转速ω对应关系如下:

上式中除ω外,其余参数均为常数,则旋翼转速和升力T及旋翼反扭矩τ之间关系可简化为:

式中:KT、Kτ分别为旋翼升力比例常数和旋翼反扭矩比例常数。

图3 单个旋翼受力分析图
由于四旋翼飞行器具有结构对称性,假设机体中心与形心重合,则同一侧单个旋翼到质心的距离是相同的,设为l,单个机翼对整个机身质心的转矩为:
M=T·l (6)
旋翼在高速运转时受陀螺效应的影响会产生陀螺力矩,该扭矩可以表示为:⇀

⇀
式中“ω为旋翼绕自身回转轴的自转角速度矢量,ω为机体绕通过质心的三条轴线转动的角速度矢量。
悬停飞行时,整机仅受旋翼的升力和不平衡反扭矩作用。在垂直飞行时,机体绕三轴的角速度非常小,则相应的陀螺力矩也非常小,另外,相邻两个旋翼旋转方向相反,其上产生的陀螺力矩可以相互制约一部分,综合上述因素,在分析整机受力时,净陀螺力矩相对于其它力和力矩可忽略不计。因此在下文中,陀螺力矩对整机产生影响被忽略。
2 伸缩折叠结构设计与强度校核
2.1 伸缩结构设计
如图4所示,四旋翼飞行器伸缩机构由螺杆、圆锥齿轮、异步电机、圆柱滚子轴承、固定螺母及内、外伸缩杆构成。单个圆锥齿轮与电机输出轴相连,四个一组圆锥齿轮分别和四根螺杆相连,螺母固定在内伸缩杆里端,圆柱滚子轴承固定在外伸缩杆里端,保持内外伸缩杆沿直线传动。遥控器发射伸缩指令,由飞行控制系统控制异步电机正转,带动单个圆锥齿轮转动,通过齿轮传导带动四个一组圆锥齿轮转动,使四根螺杆转动,四根内伸缩杆同时向内收缩,同理,异步电机反转使四根内伸缩杆同时外伸。伸缩结构具体设计尺寸见表1。

表1 伸缩结构具体尺寸表

图4 伸缩结构图
2.2 折叠结构设计
如图5所示,四旋翼飞行器折叠机构由卡槽、中央桨盘上下层、合页、外伸缩杆组成。卡槽固定在中央桨盘上层,活页两侧分别连接外伸缩杆与中央桨盘上层。展开时,卡槽卡死外伸缩杆,由于桨拉力向上固定外伸缩杆。手动调节向下扳动外伸缩杆,使外伸缩杆折叠,当螺杆与中央桨盘下层垂直时,完成折叠过程。折叠结构具体设计尺寸见表2。

表2 折叠结构具体结构尺寸 /mm
2.3 关键结构强度校核
本文仅校核四旋翼飞行器在空中悬停、垂直起降两种状态下的结构强度,整机所受到的力包括旋翼提供的升力以及旋翼反扭矩。

图5 折叠结构图

图6 伸缩杆受力图
假设机体整体为均匀对称的刚体结构;认为四个旋翼与其相连的杆是正交的(故不考虑旋翼转动对伸缩的影响),其中结构受力关键部件主要包括方管剖面1和剖面2处强度和剖面2的扰度计算(如图6)。假设中央桨盘与四根外伸缩杆固定连接,视为刚体,内外伸缩杆均为固定端约束。
各内伸缩杆受到旋翼的提供的升力和旋翼的反扭矩作用。旋翼反扭矩对内伸缩杆施加水平方向弯矩,旋翼升力对内伸缩杆施加竖直方向弯矩。水平方向和竖直方向弯矩图如图7所示[6]。

图7 内伸缩杆弯矩图
由弯矩图可知:内伸缩杆最大危险截面为剖面1。取xy上面、xz后面与剖面1的交界处为一单元体,切应力和正应力方程分别为:

按照Tresca强度设计准则:

已知6061铝合金许用应力[σ]=228 MPa,将式(8)、(9)、(10)的值带入式(11)得:

则内伸缩杆强度符合要求。
计算挠曲线方程:

已知6061铝合金弹性模量E=75 GPa,代入式(13)得:

取最大值为 Y=0.13368 mm<0.5 mm,则外伸缩杆与内伸缩杆不会接触,对伸缩不造成阻碍。
如图6所示,外伸缩杆与中央桨盘视为固定端约束。旋翼反扭矩对伸缩杆施加水平方向弯矩,旋翼升力对伸缩杆施加竖直方向弯矩。水平方向和竖直方向弯矩图如图8所示。
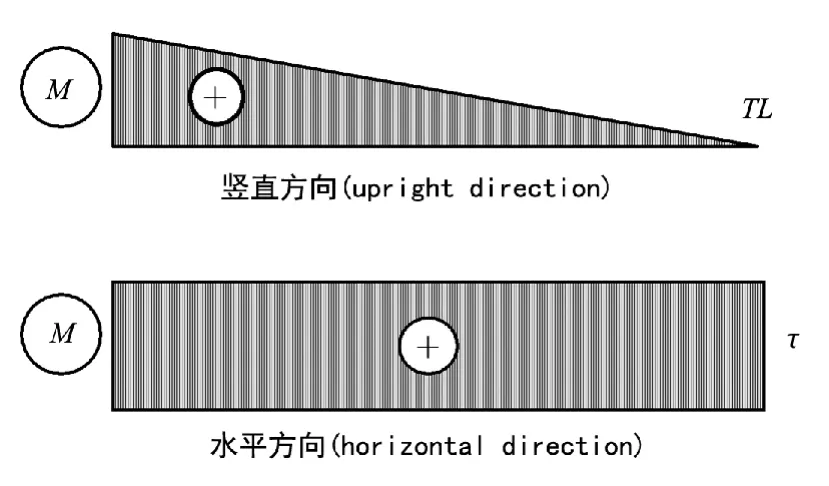
图8 外伸缩杆弯矩图
由弯矩图可知:外伸缩杆最大危险截面为剖面2。取xy上面、xz后面与剖面2的交界处为一单元体,切应力和正应力方程分别为:按照Tresca强度设计准则:


已知6061铝合金许用应力[σ]=228 MPa,将式(15)、(16)、(17)的值带入(18)得:

则外伸缩杆强度符合要求。
3 实验验证
根据对该折叠伸缩结构的力学性能分析,采用牌号为6061、尺寸分别为15mm×15mm×0.5mm和13 mm×13 mm×1 mm的铝合金方管作为四根伸缩机臂,3K小丝束碳纤板作为中央桨盘和其他固定装置制作总体尺寸为650 mm的四旋翼无人飞行器[7]。具体配置见表3。
经制作,四旋翼无人飞行器机架部分实物如图9所示。装配上飞控和动力等分系统后,测试电路,检查电路连接,用万用表测各部分电路电源电压是否正常。通过双手轻握感知飞行器能否稳定飞行,在确保无误条件下将飞行器遥控飞行。
在室内测试正常的条件,可进行在室外遥控飞行,验证伸缩机构的稳定性。四旋翼无人飞行器室外飞行效果如图10所示。

表3 四旋翼飞行器配件清单

图9 四旋翼飞行器机架部分

图10 四旋翼飞行器飞行图
4 结论
将伸缩、折叠机构与四旋翼无人飞行器的设计结合,通过对该四旋翼无人飞行器伸缩、折叠机构的力学分析与实验验证,设计和制作出具有空中自动伸缩、着陆后手动折叠功能的四旋翼无人飞行器。对四旋翼无人飞行器的结构外形设计进行了一定的探讨,得到了一种能够进行可靠飞行的新型四旋翼无人飞行器结构,为进一步改进四旋翼无人飞行器结构外形提供了新思路。
[1] 刘 伟.四旋翼无人飞行器设计与实验研究[D].哈尔滨:哈尔滨工程大学,2011.
[2] 刘 杰.四轴飞行器研究与设计[D].南京:南京邮电大学,2013.
[3] 江 斌.小型四旋翼低空无人飞行器综合设计[D].杭州:浙江大学,2013.
[4] 庞庆霈,李家文,黄文浩.四旋翼飞行器设计与平稳控制仿真研究[J].电光与控制,2012,19(3):51-55.
[5] 陈航科,张东升,盛晓超,王凯.四旋翼飞行器悬停状态姿态控制建模与仿真[J].计算机仿真,2013,30(13):41-45.
[6] 刘 俊,李炳文,任 锐.折叠式护帮板力学分析与强度校核方法[J].煤矿机械,2012,33(10):85-87.
[7] 雷荣兴.无线电遥控模型飞机动力系统的调配[J].南昌航空工业学院学报,2000,14(4):19-23.
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
装备制造技术(2020年1期)2020-12-25
空间科学学报(2020年4期)2020-04-22
电子制作(2019年9期)2019-05-30
电子制作(2018年2期)2018-04-18
北京航空航天大学学报(2016年8期)2016-11-16
北京航空航天大学学报(2016年3期)2016-02-27
小朋友·快乐手工(2015年5期)2015-06-06