一种便携式的乔木相对坐标测量仪的设计
2015-11-22 06:41军魏识广李
大众科技 2015年4期
陈 军魏识广李 林
(1.桂林电子科技大学电子工程与自动化学院,广西 桂林 541004;2.桂林电子科技大学生命与环境科学学院,广西 桂林 541004)
一种便携式的乔木相对坐标测量仪的设计
陈 军1魏识广2李 林1
(1.桂林电子科技大学电子工程与自动化学院,广西 桂林 541004;2.桂林电子科技大学生命与环境科学学院,广西 桂林 541004)
为了满足林业调查工作中对移动手持式测量仪体积小、重量轻、携带方便、价格低廉、容易操作的要求,设计了一种基于MSP430的便携式的乔木相对坐标测量仪。该设备由单片机、显示屏、GPS模块,存储器以及蓝牙模块等电子元器件组成,以MSP430单片机为核心控制器件,通过串口与GPS模块通信,接收GPS输出的定位信息,转化为乔木的相对坐标值,并将其值送入LCD实时显示,存储模块存储,蓝牙模块上传到外设。文章介绍了GPS定位的基本原理,绝对坐标转相对坐标的方法以及系统各部分的硬件及软件实现,并对样机进行了实测,结果表明:仪器精度上可以满足实际工作需要,具有很好的实用性。
相对坐标;MSP430;GPS
1 引言
测定乔木的相对坐标是林业生产和森林资源调查的重点和难点,它是生态学研究中非常关键的测量指标,它不仅可以为乔木的生长检测提供定位依据[1],而且有利于建立乔木竞争模型,模拟乔木生长模型的发展趋势。现阶段测定乔木坐标的仪器有电子经纬仪和全站仪等,但这些仪器具有携带困难、操作繁琐、使用复杂,对专业的知识需求较高等特点,更重要的一点是测得的数据都是待测点的绝对坐标值,想要获得其相对参考点的坐标值,还要经过人为的计算。因此在森林调查工作中,能方便携带和操作的仪器越来越突显其重要性。本文介绍的乔木相对坐标测量仪,很好的解决了上述难题,该仪器采用了GPS跟MSP430技术,能自动测量、显示、存储乔木的相对坐标值。
2 GPS系统
2.1GPS定位原理
以下用简单的说明和图解简要说明GPS定位原理[2]:
设GPS模块所在地(待测地点)坐标为(x,y,z),GPS模块搜索到的卫星坐标为(Xn,Yn,Zn),卫星到GPS模块的距离为Rn:(以下用三个卫星定位为例)
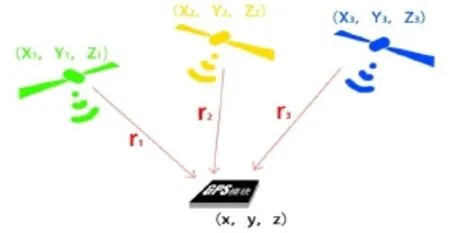
图1 GPS定位原理图
由以上图片可知,要获得待测点的坐标(X,Y,Z),笔者得知道GPS模块到各个卫星的距离:r1,r2,r3,以及各个卫星的坐标:(X1,Y1,Z1)、(X2,Y2,Z2)、(X3,Y3,Z3)。
距离(r1,r2,r3)的测量使用单程测量法:通过测量信号从卫星送到GPS模块所用的时间,乘以信号传播的速度,就可以得到GPS模块到卫星的距离:r=CΔT
ΔT可以从接收机直接获得,笔者可以把 GPS定位仪和GPS定位卫星的时间差异Ta当成一个未知变量,再增加一颗GPS定位卫星,即可通过求解四个等式的方程组,最后计算出四个未知数。

解方程,即可得出(x,y,z)坐标。
2.2绝对坐标转相对坐标方法
绝对坐标指的是对整个地球而言,以本初子午线为y轴,以赤道为 x轴的坐标轴,即我们常说的经纬度;而相对坐标是指,为了监测、研究的方便或其他目的,通过自行设定的坐标轴(坐标原点、y轴、x轴、单位)所计算出来的坐标,即为相对坐标[3]。
相对坐标的计算公式具体如下:

X为相对坐标的横坐标(km);Y为相对坐标的纵坐标(km);α相对坐标原点纬度(ddmm.mmmm);β相对坐标原点经度(dddmm.mmmm);α’为待测点纬度(ddmm.mmmm);β’为待测点经度(dddmm.mmmm),Rw为纬线所在圆的半径(km);J为单位经度所跨的距离(km/°)。
下面的问题就是怎么求得Rw和J。以下通过
autoCAD2012软件建立模型求单位经度所跨距离。

图2 单位经度跨度距离计算模型图
已知纬度为α(ddmm.mmmm),由于待测点不在赤道也不在两极,因此地球的半取用平均半径R=6371.393km。


Rw为纬线所在圆的半径(km);L’为纬线所在圆的周长(km);J为单位经度所跨的距离(km/°)。
3 系统的硬件设计
3.1系统整体结构设计
乔木相对坐标测量仪硬件整体分为两大部分:主控部分和GPS数据采集模块。其中主控部分由MSP430F149单片机、键盘、液晶显示、电源、外存储器等模块组成[4、5]。GPS数据采集模块由GPS-NEO-6M-001芯片、RT9166-3.3IC芯片、天线以及一些外设组成。其系统结构框图如图3所示。
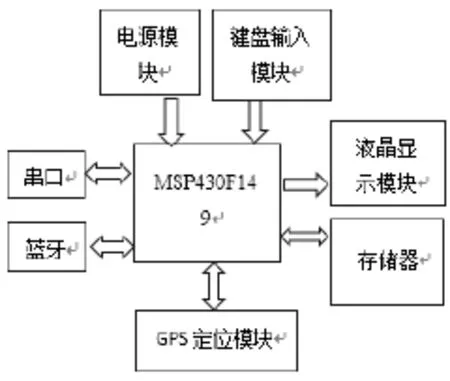
图3 系统结构框图
中央处理器:选用德州公司生产的低电压、超低功耗MSP430F149芯片(工作电压3.6V~1.8V,正常模式280微安,2.2V,待机模式1.6微安)[6]。MSP430F149是具有强大处理能力的具有16位总线的FLASH单片机。采用16位精简指令集结构,16位总线,寻址范围可达64K,具有统一的中断管理,接口丰富,有较高的处理速度。该芯片为FLASH型,可以在线对其调试和下载,方便实用,且对环境和人体的辐射小,可靠性能好,加强电干扰不受影响,功耗低的特点,非常适合用于电池供电的便携式测量仪。
GPS定位模块:GPS模块选用奋斗嵌入式开发工作室出品的一款高性能、强信号、抗干扰能力强的GPS定位芯片:GPS-NEO-6M-001[7]。该芯片接TTL电平,兼容3.3V和5V单片机系统,支持冷启动、温启动、热启动,其中冷启动为27秒,热启动时间为1秒。数据更新速率最高5HZ, 能够快速一次定位,自主定位2.5m,SBAS(基于卫星的增强系统)2m,速度精度可达 0.1m/s。串口通信速率有 4800bps,9600bps,38400bps可选。
电源模块设计:电源是任何一台仪器的能源供给原件,任何一台仪器都需要电源或其他能源作为能源供给来实现仪器的运行。对本设计而言,电源也是重要的组成部分之一。为了适应野外监测环境,电源要求容量大、续航能力强等,因此,本设计采用多渠道的能源供给,第一是可充电式5V锂电池作为电源供给;第二是太阳能电池作为电源供给[8]。其中可充电式锂电池作为乔木坐标测量仪的主要供电电源,太阳能电源作为应急电源、备用电源使用。
显示模块设计:考虑到仪器的体积、便于携带程度以及功率、能耗、续航能力等问题,选用体积小、能耗低、便于携带的液晶显示模块:LCM12864ZK。LCM12864ZK能够显示字母、数字、符号,具有睡眠、正常以及低功耗工作模式,可满足便携式仪器低功耗的需求[9]。MSP430f149与LCM12864ZK接口电路如图4所示:MSP430f149及GPS模块工作电压是3.3V,但是LCM12864ZK
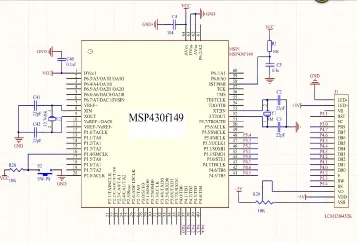
图4 MSP430f149与LCM12864ZK接口电路
工作电压是5V,故系统中加入电压转换模块如图5所示,其中P1和USB均为输入接口,可以选择其中一个作为5V输入电源。AS1117-33为稳压输出芯片,稳定输出3.3V电源为
MSP430f149单片机供电。
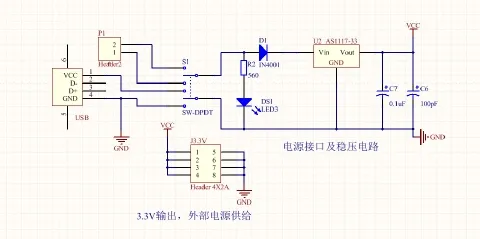
图5 稳压及电源电路
GPS定位模块如图6所示,该模块由GPS-NEO-6M-001芯片、无源天线,板载充电电池以及一些外设构成。其中后备电池在主电源断电后,可以维持半小时的GPS星历保护。在该设计中,只需使用RXD1、TXD1、VCC和GND4个引脚便可以完成对GPS-NEO-6M-001芯片的设置。其中RXD1为串行数据接收引脚,TXD1为串行数据发送引脚,可直接与430的串口直接连接[10]。
4 系统的软件设计
GPS-NEO-6M-001采用美国国家海洋电子协会针对海用电子设备制定的报文格式协议NMEA -0183协议。该GPS卫星数据报文使用ASCII码编码,该编码比较直观并且易于处理,其默认的输出波特率为:38400bps,其包括8位数据位,1位起始位,1位终止位,没有奇偶校验。由于本设计所需要的卫星GPS数据不多,关键是经纬度,因此,为了节约RAM存储空间,同时提高运算速度,采用GLL卫星数据报文格式[11]。其标准格式如下:

其中:纬度,格式:ddmm.mmmm;经度,格式:dddmm.mmmm;UTC格式:hhmmss;定位状态:A为有效定位,V为无效定位;模式指示:A为自主定位,D为差分,E为估算,N为数据无效;
2014年,林赛(天津)工业有限公司将继续秉承客户至上的原则,不断为客户提供优质、快捷、可行的服务。美国林赛喷灌机,为作物提供完美灌溉,为地球节约每一滴水!
4.1GPS信息接收软件设计
该系统采用中断方式接收并且处理 GPS传送过来的数据信息,将其转化为相对坐标值后,在LCD上显示相关信息,因此系统软件主要分一下几个部分:GPS信息接收程序模块、相对坐标转换程序模块、液晶显示程序模块。其工作过程如下:首先由GPS信息接收程序模块接收数据报文,并判断数据是否有效;若有效,相对坐标转换程序模块就会将 GPS数据报文的格式(ddmm.mmmm)转换为可用的格式(dd.dddddd),将绝对坐标转换为相对坐标;并将相对坐标的值送入LED上显示。GPS信息接受程序的工作原理如图7所示:

图7 GPS数据报文接收程序流程图
程序开始收到串口中断信号,RI置0,找出报文首标识符”$”,若找到,开始接收报文数据,由报文可知,每个数据后都有“,”,对逗号“,”的数量进行统计就可以标识出不同数据的位置,当遇到结束标识符“*”时,就停止接收数据。在开始接受报文数据时,首先判断数组data.top[]中的第五个和第六个字符分别是否为“L”、“L”,若是,表明接收到“$GPGLL”,当接收到一个逗号后,开始接收纬度数据,收到后将其ASCII码转化为十进制数,存入latitude[]数组中,然后依次接收南北,经度,东西以及状态信号,当出现第六个逗号时,接收数据有效字符AV,A表示数据有效,V则表示数据无效,需要重新判断接收,当接收到的状态信号为A时,此时数据接收完毕,串口接收中断标志清零。
4.2相对坐标转换程序设计
由于从GPS模块传来的数据报文信息是度、分格式的,而我们测量的相对坐标值是米格式的,因此程序中必须加入相对坐标转换程序。首先将将卫星纬度数据度、分格式转化为含小数点的度格式,然后将得到的待测点纬度减去相对坐标原点纬度,得到纬度差值,接着调用绝对值函数,得到正的差值,最后调用纵坐标计算函数,并且将纵坐标的各个位分离,分别存入数组中。由相对坐标转换原理可知,单位纬度所跨的距离是相同的,而单位经度所跨的距离是不同的,因而在编写程序时,经度、纬度相对坐标转换的方法有所不同,首选得到正的经度差值,这与纬度的原理一样,得到经度差值后,计算待测点所在的经线的周长,接着调用单位经度所跨距离函数,最后调用横坐标计算函数,并且将横坐标的各个位分离,分别存入数组中。
4.3主程序设计
系统的主程序流程图如图8所示,首先对单片机以及显示模块初始化。选择串口工作方式1,调用串口中断服务子程序,对GSP信息进行提取,当信息采集完以后,将其转化为相对坐标值,再发送到显示模块进行显示,并将有用数据存储起来。

图8 系统主程序流程图
5 样机实测及精度分析
根据上述设计制作了基于MSP430单片机便携式的乔木坐标测量仪样机,我们首先通过软件对测试坐标仪器进行校准后,才开始进行进一步模拟实际工作的坐标测量测试。我们选择桂林电子科技大学花江校区14栋宿舍楼后方的小树林作为样块,进行测试。其中实测结果如下表:(标准值由Google Earth得到)

表1 所选参考原点数据表
由表1可以看出,所选参考点的标准值与实测值几乎相等。
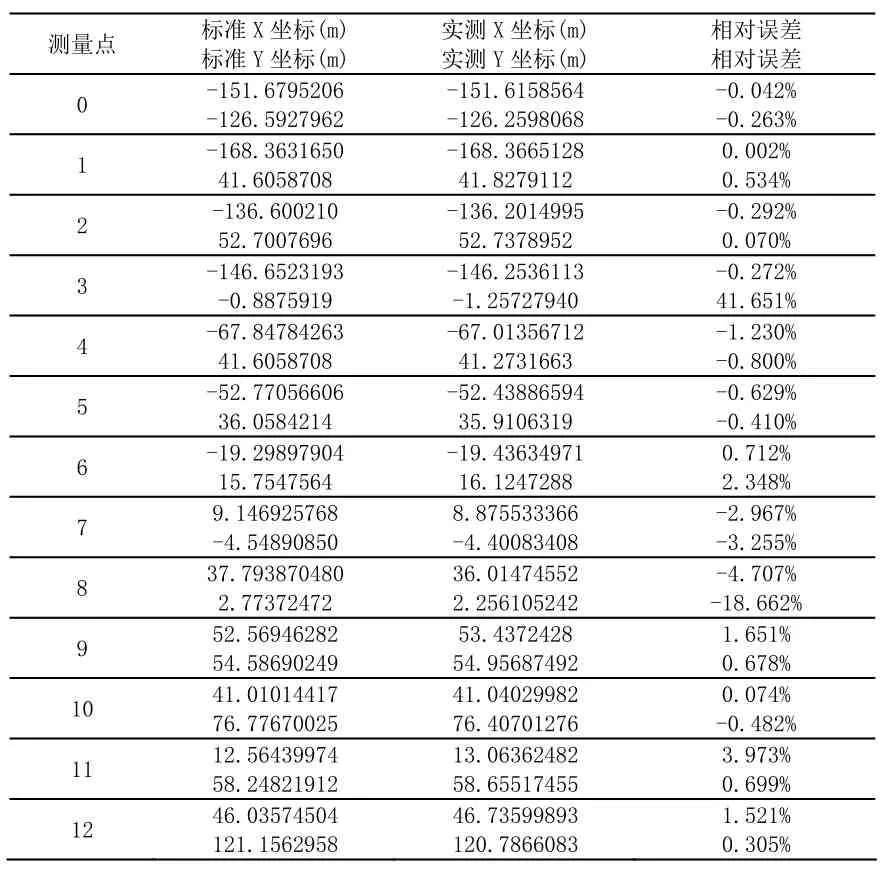
表2 所选测量点数据表
由上表可以得出:
(1)通过计算求出平均差距,纬度:0.307246621米,经度:0.474226325米,即相对坐标测量精度为纬度:<0.5米,经度:<0.5米;
(2)由于坐标测量仪的精度一定,因而当测量点与相对坐标原点距离越近时,相对误差越大,相反距离越大时,相对误差越小;
误差分析:在测量中,GPS定位卫星是不断运动着的,卫星数据会产生偏差[12、13];天气影响,当时阴天,云层较厚,可能影响测量;仪器本身的机械误差等。
6 结束语
围绕便携式仪器的低功耗、高精度这一原则,本研究设计了一种基于MSP430单片机的低功耗乔木坐标测量仪。通过模拟实际工作进行的实测,经过校正后,设计的坐标测量仪能够很好地对森林中乔木坐标进行测量,精度上可以满足实际工作需要,同时具有体积小,质量轻,便于携带,低成本,具有较强的实用性。
[1] 贾长久.森林调查设计适应环境保护的探索[J].吉林农业(学术版),2011,442(4):165-169.
[2] 王惠南.GPS导航原理与应用[M].北京:科学出版社,2003.
[3] 徐宗成.GPS卫星定位在测量工作中的坐标转换[J].交通世界,2008,20(15):35-38.
[4] 李光飞.楼然苗.单片机课程设计实例指导[M].北京:北航出版社,2004.
[5] Jose Luiz Berg.The Integration Between EAI and SOA[J]. SOA Magazine,2011,12(9):231-235.
[6] 解宁波,曹红松.基于单片机的GPS接收机设计[J].机械管理开发,2011,(4):45-48.
[7] 李斌.基于MSP430单片机的GPS定位系统设计[J].制造业自动化,2010,6(32):61-64.
[8] 马兰,袁卫.基于GPS的数据采集系统设计[J].现在电子技术,2010,(15):61-63.
[9] Mohammad Rehan,Goknur zu Akyuz.Enterpise Application Integration (EAI),Service Oriented Architectures(SOA) and their relevance to e-supply chain formation [J].African Journal of Business Management,2010,4(13):2604-2614.
[10] 佚名.GPS-NEO-6M-001芯片产品说明书[M].奋斗工作室,2010.
[11] 罗荻.提一种GPS定位系统接口电路的设计[J].电子技术与软件工程,2014,5(3):139-142.
[12] 李成丰.提高 GPS测量精度的分析及措施[J].改革与开放,2009,54(11):177-180.
[13] 王炎.提高 GPS定位技术高程测量精度的要素及方法[J].北京测绘,2012,54(2):56-59.
Design of a portable treesrelativeCoordinates measuring instrument
In order to meet the requirement of forestry survey work on mobile handheld altimeter instrument which has the advantages of small size, light weight, convenient carrying, low price requirements, easy to operate, the design of a portable trees relative coordinate measuring instrument based on MSP430. The device is based on angle sensor, microcontroller, display, ultrasonic ranging module, GPS module, Bluetooth module and other electronic components. The MSP430 microcontroller as the core device to control the device, through the serial port module to communicate with the GPS, to receive location information, and the useful information into the LCD real-time display, storage module stores. This paper introduces the basic principle of GPS positioning,method of absolute coordinates into relative coordinates, the various parts of the system hardware and software and the prototype test. Results show that the instrument accuracy can meet the demand of practical work, which has the very good practicability.
Relative coordinates;MSP430;GPS
S758
A
1008-1151(2015)04-0073-04
2015-02-11
陈军(1987-),男,桂林电子科技大学电子工程与自动化学院硕士研究生,研究方向为生态测量仪器;李林(1978-),女,桂林电子科技大学生命与环境科学学院副教授,研究方向为环境监测、生态测量仪器等。
猜你喜欢
建材发展导向(2021年13期)2021-07-28
学校教育研究(2019年21期)2019-11-11
电子制作(2019年9期)2019-05-30
中学生数理化·中考版(2018年11期)2019-01-31
齐鲁周刊(2017年29期)2017-08-08
电子制作(2017年7期)2017-06-05
天文爱好者(2016年6期)2016-12-21
测绘学报(2014年2期)2014-01-11
中学政史地·初中(2009年11期)2009-01-05