
基于宏程序的数控车床编程方法研究
2015-11-21 11:01:08陈农娣
新教育时代电子杂志(教师版) 2015年17期
陈农娣
(广东省工业高级技工学校 广东韶关 512005)
基于宏程序的数控车床编程方法研究
陈农娣
(广东省工业高级技工学校 广东韶关 512005)
本文主要针对宏程序的数控车床编程的方法展开了研究,对相关的数学理论作了详细的介绍,并提出了一系列的编程方法和技巧,以期能为有关方面的需要提供有益的参考和借鉴。
宏程序 数控车床 编程方法
由于数控技术没有直接可调用的指令,在一些比较特别的编程中就需要宏程序进行工作。而宏程序具有通用性强、程序短、效率高、检查和修改方便等优点,在数控车床的编程中逐渐得到了广泛的应用。基于此,本文就宏程序的数控车床编程的方法进行了研究,相信对有关方面的需要能有一定帮助。
1.相关数学理论介绍
1.1 特征曲线方程
以椭圆曲线方程为例,x,y为直角坐标系的横坐标和纵坐标,a,b为长短轴,θ为椭圆上任意一点与原点的连线与x轴形成的夹角。
需要注意的是在数控车床编程中,z,x为编程坐标系的横坐标和纵坐标,故直角方程要进行相应变换,即此处x表示半径值。
在椭圆方程中,a若在x轴方向上,b在z轴方向上,则方程应变为:即长短轴与坐标轴存在一一对应关系。
关于如何选择坐标系的问题,一般情况下建议采用直角坐标系,因为其符合我们编程坐标的轴数。但当已知起点和终点对应坐标原点的夹角时,应采用参数坐标系。因此已知条件不同,选择的坐标系不同。
1.2 坐标的平移及坐标的变换
1.2.1 坐标的平移问题
首先要确定坐标坐标平移前后的原点。其次,找出平移前的坐标原点与平移后的坐标原点存在的关系。最后进行一次换算即可。
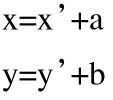
上式即一点在坐标系平移前后之坐标关系式。
1.2.2 坐标的旋转问题
首先要明确旋转的角度,然后根据矢量叠加原理,确定
变换方程即可。
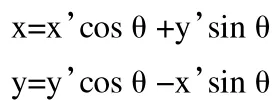
上式即为经过旋转θ角后在直角坐标系中某一点坐标的关系式。
1.2.3 坐标平面内任意变换问题
若是坐标变换中,既存在平移变换,又存在旋转变换,建议优先进行平移变换再进行旋转变换,符合由简单到复杂的原则。
2.编程方法与技巧
2.1 特征曲线宏程序的使用步骤
2.1.1 选定自变量。
一般有以下两种情况:
(1)若已知标准方程,非圆曲线中的X和Z坐标均可以被定义成为自变量,一般选择变化范围大的一个作为自变量。但一旦给定起点和终点的已知条件,则应选择已知条件较多的该轴坐标为自变量。
(2)参数方程一般只有一个变量,所以这个变量就是自变量。
2.1.2 确定自变量变化范围。
值得注意的是,必须明确该坐标值的坐标系是相对于非圆曲线自身的坐标系,其起点坐标为自变量的初始值,终点坐标为自变量的终止值。
2.1.3 进行函数变换,
确定因变量相对于自变量的宏表达式。在标准方程中因为存在根号,所以因变量有正负两个,但是根据图纸可以直接判断取舍一个。函数变换得:,舍正取负。在参数方程中,因为X和Z分别对应同一个自变量,所以不用进行函数变换。
2.1.4 进行坐标变换
根据※1.2坐标系转换,将自身坐标系转换成编程坐标系 (工件坐标系)的过程。这样,才可以在机床上实现正确加工。
2.1.5 利用WHILE/DO循环语句完成宏程序编制。
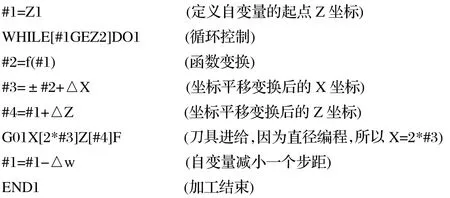
一般格式为:

需要注意的是,【循环体】包括函数变换、刀具进给和自变量自增三部分。
刀具进给一般采用G01指令。自变量自增(减)目的是为了使循环体得以循环,例如x=x+1,自增(减)值可以是1以外的数字,数值越大,步距越大,加工精度越低,数值越小,步距越小,加工精度越高。精度越高,数控系统运算量越大,进给速度越慢,加工效率越低,因此必须根据加工要求合理选择步距。
下面笔者以WHILE/DO语句编写一段椭圆加工程序。
2.2 特征曲线实例编程
2.2.1 标准椭圆宏程序编程
加工图1所示椭圆轮廓,棒料Φ45,编程零点放在工件右端面。
分析:
(2)根据已知条件令Z为自变量。
(5)因为编程零点放在工件右端面,所以必须将椭圆中心变换至编程零点,根据平移公式得出:x=x';z=z'-60
(6)编写WHILE/DO语句如下:



图1
2.2.2 抛物线宏程序编程分析图2:
(1)已知该抛物线方程为:。令Z为自变量。
(2)根据已知条件,自变量Z变化范围在自身坐标系中为【1,15.626】。
放眼全省,玉溪市全面落实河(湖)长制为重点,建立覆盖全流域的责任体系,坚决打好新时代抚仙湖保卫战;大理州认真总结洱海流域水环境保护治理工作经验,把“生态+”的理念融入全州产业发展……“绝不以牺牲环境为代价来发展经济”,成为云南各族群众在改革开放进程中的共识。
(3)函数变换:。因为x在原点下方,舍正取负。
(4)因为编程零点放在工件右端面,所以必须将曲线中心变换至编程零点,根据平移公式得出:x=x'+20;z=z'-25.626
(5)编写WHILE/DO语句如下:
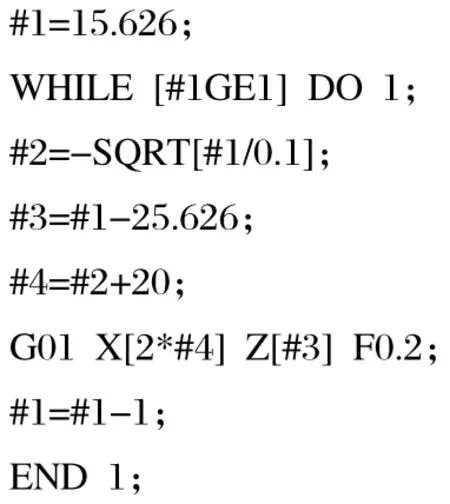

图2
2.2.3 斜椭圆宏程序编程分析图3:
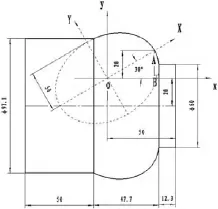
图3
(1)根据已知条件令θ为自变量。因为起点和终点不在同一象限,而且x、y不存在一一对应函数关系,故不能以x或y为自变量,而应该以θ为自变量。
(2)自变量范围需要通过计算求得。根据参数方程x=a*cosθ或y=b*sinθ,只要知道起点和终点的x或y的的坐标值,就可以求得起始角和终止角。
已知在xoy坐标系中,计算得到:
起点x=50-12.3=37.7,y=60/2-20=10,
终点x=97.1/2-20=28.55y=47.7+12.3-50=-10;
在XOY坐标系中,分别计算起点和终点的X坐标值(根据※1.2坐标系转换公式)
起点X=xcos30°+ysin30°=37.7*cos30°+10*sin30°=37.649;
同理,终点X=5.6125;
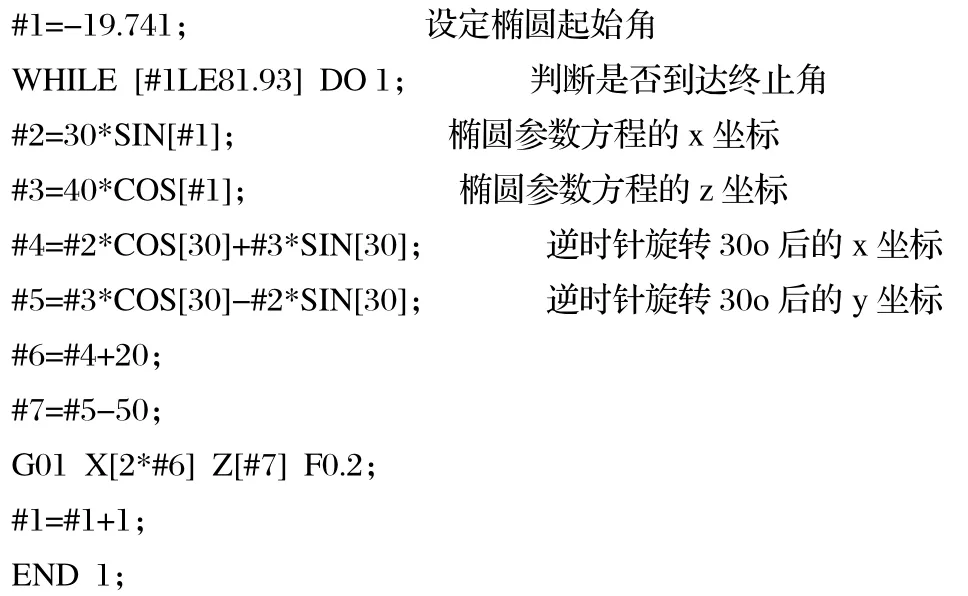
将计算出的起点和终点值带入公式 x=a*cosθ,求得起始角θ1=-19.741o和终止角 θ2?=81.93o;故自变量 θ 范围为[-19. 741,81.93]。
(4)根据已知得到椭圆参数方程:x=40*cosθ,y=30*sinθ。
(5)因为编程零点放在工件右端面,所以必须将椭圆中心变换至编程零点,根据平移公式得出:x=x'+20;z=z'-50;
(6)编写WHILE/DO语句如下:
结语
综上所述,宏程序是数控系统的一种扩展功能,具有通用性强、程序短、效率高、检查和修改方便等优点,在数控车床的应用中能有极大的帮助。而本文就针对宏程序的数控车床编程的方法作了系统的探讨,旨在能为数控车床技术的发展进步提供帮助。
[1]程启森、张俊.数控车床非圆曲线宏程序编程优化处理[J].煤矿机械. 2014(07).
[2]罗根云、于小莎.浅谈数控车床编程中宏程序的巧用[J].科技资讯. 2010(11).
猜你喜欢
智能制造(2021年4期)2021-11-04 08:54:44
制造技术与机床(2019年12期)2020-01-06 03:17:48
现代苏州(2019年16期)2019-09-27 09:31:02
语言与文化论坛(2019年3期)2019-04-13 02:25:04
制造技术与机床(2017年4期)2017-06-22 11:18:05
湖北文理学院学报(2017年2期)2017-04-16 05:09:06
燕山大学学报(2015年4期)2015-12-25 02:20:01
深圳职业技术学院学报(2015年5期)2015-11-30 06:22:22
焊接(2015年9期)2015-07-18 11:03:53
制造技术与机床(2015年10期)2015-04-09 07:05:42
