
基于时栅的双回转工作台设计
2015-11-18 12:24朱革吴武峰周启武
机床与液压 2015年16期
朱革,吴武峰,周启武
(重庆理工大学电子信息与自动化学院,重庆 400054)
目前国内外的回转工作台即第四轴,通常只有一个工作台或者一个回转轴,这往往不能满足一些特殊领域的专用仪器的特殊要求,比如,材料分析领域中用到的X 射线衍射仪的测角仪,这类仪器不仅要求具有高精度的角度测量功能,还要求具有两个负载工作台,并以1∶ 2 的角速度比联合驱动,在联合驱动过程中注重角度关系的配合以及测量的精度,对装置自身的定位要求并不高。若将测角仪的定位精度加以改善,其实质便是一种特殊的精密转台装置。
文中设计的双回转工作台,采用同心同轴结构设计,双轴通过两台步进电机独立控制,可同时同向旋转也可同时逆向旋转,通过控制电机的转速,可实现双轴以1∶ 2 的角速度比联合驱动,再结合作者具有自主知识产权的时栅角位移测量技术[1],使得双回转工作台具备了测角仪的基本功能。
1 双回转台需实现的基本功能和技术要求
双回转台需要实现X 射线衍射仪中测角仪的基本功能:(1) θ-2θ 联动功能[2]。这种θ -2θ 联动功能见图1。样品随内转台绕中心O 轴作θ 转动,同时探测器随外转台绕中心O 轴作2θ 转动,在转动过程中,内外转台的角速度始终保持1∶ 2 的比值。(2)高精度角度测量功能。测角准确度优于0.001°,角度测量的重现性优于±0.000 2°。(3) 其他要求。内转台承载力不小于1 500 N,外转台承载力不小于200 N,内转台600 mm 高度处的圆心全跳动小于12 μm,安装在外转台的探臂圆心全跳动小于12 μm,内外转台的同轴度在5~10 μm 之间。

图1 X 射线衍射测角仪θ-2θ 联动
2 双回转台的工作原理及设计方案
双回转台的工作原理是:在工作台启动前,内外转台的位置均处于初始位置0°线;启动后,脉冲信号驱动步进电机1 和9 分别以v 和2v 的速度工作,步进电机通过两组具有相同减速比的齿轮减速装置(同步带轮) 2、3、10、11 进行第一级减速,再通过具有相同传动比的蜗轮蜗杆副6、7、12、13 进行第二级减速,动力通过轴驱动内外工作台实现θ 转动和2θ 转动,在传动过程中内外转台始终保持1∶ 2 的角速度比,从而实现θ-2θ 联动。双回转台的设计方案如图2 所示。
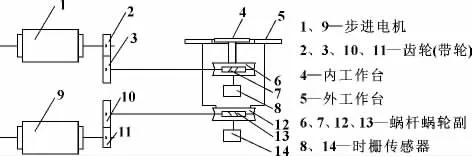
图2 双回转台的设计方案图
3 双回转台的结构设计
根据设计要求,双回转台的步距角小于0.001°,故可选择步距角θ=0.9°的步进电机与传动比为1 000的减速装置,折算到转台的步距角为Δθ=0.000 9°≤0.001°,转台一次定位所输出的脉冲总数为N=s/Δθ,其中s 为转台该次定位的驱动位移量。
3.1 双回转台的总体结构设计
综合考虑双回转台的外形尺寸要求,以及保证双回转台具有较高的同轴度和较小体跳动误差,设计出如图3 所示的机械结构。
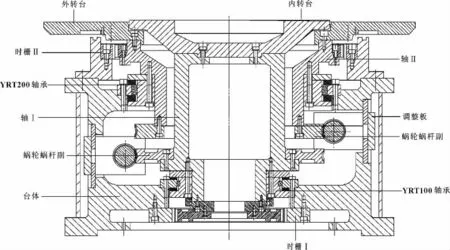
图3 机械结构图
图中,内外转台分别与轴Ⅰ和轴Ⅱ相连,轴Ⅰ和轴Ⅱ分别通过YRT100 轴承和YRT200 轴承与台体相连,在轴Ⅰ和轴Ⅱ上又分别连接有蜗轮蜗杆副和时栅传感器Ⅰ、Ⅱ。从图中还可以看出,轴Ⅰ和轴Ⅱ拥有相同的中心轴,外转台套在内转台外面,并且内外转台相互独立,这就是前面所说的同心同轴结构。这种相互独立的结构设计,在实现联动功能上,不再依靠机械上的联动方式,而是通过控制内外转台各自的角速度来实现,控制起来更加灵活多变、互不影响。
3.2 传动比分配及传动齿轮参数设计
内外转台采用相同技术参数的减速齿轮装置。一级减速采用3M 圆弧齿形同步带:小带轮齿数Z1=24,分度圆直径D1=23 mm,大带轮齿数Z2=96,分度圆直径D2=92 mm,传动比i1=4;二级减速采用蜗轮蜗杆副:蜗杆头数:z1=1,分度圆直径d1=30 mm,蜗轮齿数z2=250,蜗轮分度圆直径d2=250 mm,传动比i2=250;总的传动比i=i1×i2=1 000。
3.3 电机的选型
根据前面所述,采用的步进电机必须克服低速爬行问题。德国的百格拉三相混合步进电机采用交流伺服控制原理,几乎无共振区、无爬行、无噪声,具有高速扭矩大、启动频率高、驱动器可靠性好、性价比高等优点[3],故为双回转工作台选用百格拉步进电机作为驱动元件。
3.3.1 内转台电机的选型
内转台零部件总质量30.48 kg,由三维软件可得内环零件的转动惯量:

最大负载m1=150 kg,负载半径为r1=0.1 m,负载的转动惯量:

负载和内转台零件总的转动惯量之和:

驱动负载和内转台零件的所需的转矩:

其中:ε 为负载和内环零件的启动加速度,ε'为电机轴端的加速度,传动比i=1 000,百格拉步进电机空载下的最高启动速度n=6.3 r/s,最高启动频率f≈8.5 kHz,YRT 回转轴承的启动摩擦力矩通常为工作力矩的2.5 倍,即Mf=2.5 ×3 N·m=7.5 N·m;因此电机轴端所需的静力矩:

这里计算的电机轴端所需的静力矩,是通过空载下最高启动速度和最高启动频率计算得出的,而实际上电机在带负载的情况下启动速度和启动频率要小很多,因此实际所需的电机轴端静力矩应比0.34 N·m小很多,故选择德国百格拉三相混合步进电机VRDM364/50LH,其最大静力矩为Mmax=0.51 N·m,足够满足上述要求[4]。
3.3.2 外转台电机的选型
同理,可根据内转台电机的选型方法来确定外转台电机的型号。外转台零部件总质量50.89 kg,转动惯量1.19 kg·m2;负载探臂可看成是长度为361.5 mm 的一根细直杆,其近端点固定在外转台上,并随外转台绕轴心旋转,近端点与轴心的距离为138.5 mm,最大载质量20 kg,通过计算可得负载的转动惯量约为2.26 kg·m2,折算到电机轴端所需的最大静力矩约为0.4 N·m。因此外转台电机同样选用德国百格拉三相混合步进电机VRDM364/50LH。
3.4 测量元件的选择
双回转台的θ-2θ 联动功能必须要有高精度的测量元件作保证。目前,国际上生产的转台所用的测量元件主要有两类:(1) 光电编码器和光栅尺;(2)由旋转变压器和感应同步器构成的测角系统[5]。X 射线衍射仪的测角仪通常选用光电编码器。但光电编码器通常对环境的要求比较苛刻,而旋转变压器和感应同步器的组合对自身的安装要求比较高,因此,双回转台选用时栅作为测量元件。时栅是一种全新原理的角位移传感器,它“以时间测量空间”,因彻底回避了精密机械刻线而使加工难度和成本大大降低,抗油污粉尘能力强,智能化程度高[6]。2004年5 月,时栅传感器样机经法定权威检测部门——中国测试技术研究院检定精度为±0.8″,达到计量光栅水平。图4为选用的场式时栅的原理示意图[7]。
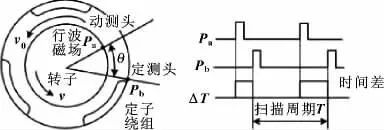
图4 场式时栅原理示意图
3.5 轴承的选择
双回转工作台需要选择与回转轴在尺寸上保持一致的轴承,同时还需要保证转台具有高轴向和径向的承载力,以及高旋转精度。P2 级精度的YRT 推力向心轴承,该型轴承具有高轴向和径向承载能力、高倾斜刚度和极高的精度,适用于回转工作台、卡盘和铁刀头以及测量和实验中的轴承配置。表1 为选用的YRT100 和YRT200 推力向心轴承的参数,可以看出:该轴承的承载力满足前文中对双回转台负载质量的要求。又双回转台选用的步进电机,其最高转速为3 600 r/min,经过减速装置减速后,驱动转台的最高转速为3.6 r/min,远远小于轴承的极限转速,故YRT 推力向心轴承符合双回转台的设计要求。此外,在安装YRT 推力向心轴承时需控制安装螺钉的扭紧力矩,尽量使转台轴承的预紧应力为螺栓屈服极限的70%,这样,一方面能满足螺栓最大轴向应力的要求,另一方面也可有效降低其最大交变应力,提高螺栓的疲劳寿命[8]。

表1 轴承参数
4 转台精度分析
设计的双回转台主要面向衍射仪中的测角仪,因此,对双回转台的测量精度和旋转精度要求比较高,而对双回转台的定位精度没有提出特殊要求。双回转台的测量精度主要取决于选用的时栅角位移传感器的精度,目前时栅转台的稳定性可达±0.5″,高于双回转台±0.000 2° (±0.72″) 的重现性精度。双回转台的旋转精度主要有以下两个影响因素:(1) 从3M圆弧齿形同步带的小带轮开始,到内外工作台之间的传动误差,这里主要是蜗轮蜗杆副的传动精度影响比较大,因此,有必要保证蜗轮蜗杆副的加工精度以及安装精度。(2) 转台轴的垂直度、径向跳动和轴向晃动都会影响转台的旋转精度,因此,在保证回转轴加工精度的同时,还需要对轴和轴承的安装进行反复的调试。此外,双回转台作为测角仪,外转台是安装探测器的地方,故外转台的圆度要求要比内转台的高。
5 结束语
基于时栅的双回转工作台是一种全新的回转工作台,其同心同轴结构设计及具有的独立回转功能,是对传统回转工作台作为第四轴在功能上的延伸,在精密机床加工领域以及角度计量领域都有着较大的参考和应用价值。
[1]彭东林,刘小康,朱革,等.时栅位移传感器原理与发展历程[J].重庆理工大学学报:自然科学版,2010,10:40 -45.
[2]姚心侃.多晶X 射线衍射仪的技术进展[J].现代仪器,2001(3) :1 -3,10.
[3]张戈.电阻绕线机总体方案及结构设计[D].成都:西南交通大学,2011.
[4]范超毅,范巍.步进电机的选型与计算[J].机床与液压,2008,36(5) :310 -313,324.
[5]霍守财.基于DSP 和CPLD 的圆感应同步器转台测角系统研究[D].哈尔滨:哈尔滨工程大学,2009.
[6]陈自然,彭东林,刘小康,等.基于时间序列的时栅数控转台动态建模研究[J].中国机械工程,2011,22(23) :2853 -2857.
[7]彭东林,刘成康,谭为民.时空坐标转换理论与时栅位移传感器研究[J].仪器仪表学报,2000(4) :338 -342.
[8]许明奇,周琳,欧阳巧琳.转台轴承预紧螺栓强度分析[J].轴承,2013(4) :16 -18.
猜你喜欢
周口师范学院学报(2022年2期)2022-06-23
机械管理开发(2021年12期)2022-01-27
机械设计与制造(2021年7期)2021-07-26
机械设计与制造工程(2021年3期)2021-04-16
机械管理开发(2020年1期)2020-03-14
中国特种设备安全(2019年8期)2019-10-14
潍坊学院学报(2017年2期)2017-04-20
邵阳学院学报(自然科学版)(2015年2期)2015-06-05
机械工程师(2015年10期)2015-02-02
湖南大学学报·自然科学版(2014年2期)2014-12-25
