
汽车智能LED 前照灯照明系统算法研究
2015-11-18 13:16孟昭军魏生越张祥军薄化钢
灯与照明 2015年1期
孟昭军,魏生越,张祥军,薄化钢
(1.辽宁科技学院 电气与信息工程学院,辽宁 本溪 117004;2.成都工业学院 电气与电子工程系,四川成都 610031)
0 引言
前照灯作为汽车的主要照明工具,关系到驾驶人和行人的生命安全。实际驾驶过程中,由于道路、环境以及驾驶人自身问题等动态不确定因素,传统的汽车前照灯照明系统不能随车速、转弯等变化而自动调整照射距离、明暗程度等参数,严重影响驾驶人对外界的判断,或者给对向行驶车辆造成眩光,不利于安全行驶。所以,国内外开始研究可以随外界环境或车辆本身变化而自动改变照射距离以及自动调整亮度的智能前照灯系统。相对国外汽车工业发达国家,中国汽车智能前照灯系统还有一定差距。
为了解决上述传统汽车前大灯所存在的问题,要求汽车智能前照灯系统具备如下基本功能:汽车在高速行驶时,能根据车速自动调整前大灯前方的照射距离和根据对向来车自动调整灯光亮度;汽车转弯时能根据车速和转弯角度自动调整前大灯水平照射角度,减少盲区。因此,汽车智能前大灯系统的研究涉及车速、转弯半径、车身高度等动态参数,这些参数之间相互影响。要使汽车智能前大灯系统随外界条件变化而自动调整,首先要确定这些参数间的数学模型。在此基础上,AFS 控制系统根据方向盘转角、车速等输入信号并依据数学模型来控制前大灯的转角和亮度等,实现汽车前大灯的智能控制。
文章主要以安全刹车距离为有效照明的判断依据,研究汽车车速、方向盘转角、弯道半径与汽车前大灯调整角度之间的关系,建立了内、外前大灯水平调整和垂直调整角度计算公式,并对公式进行了修正。然后在MATLAB/Simulink 平台上建立汽车AFS 仿真模型,并给出仿真结果。
1 前大灯调整角度的计算
汽车智能型前大灯系统,也可称汽车自适应前大灯系统,即汽车AFS(adaptive front-light system),该系统的车载传感器实时监测相关信息,AFS 控制器实时读取和处理相关信号,发出指令,驱动智能前大灯调整照射角度并输出合适光型,汽车AFS 的组成如图1 所示。
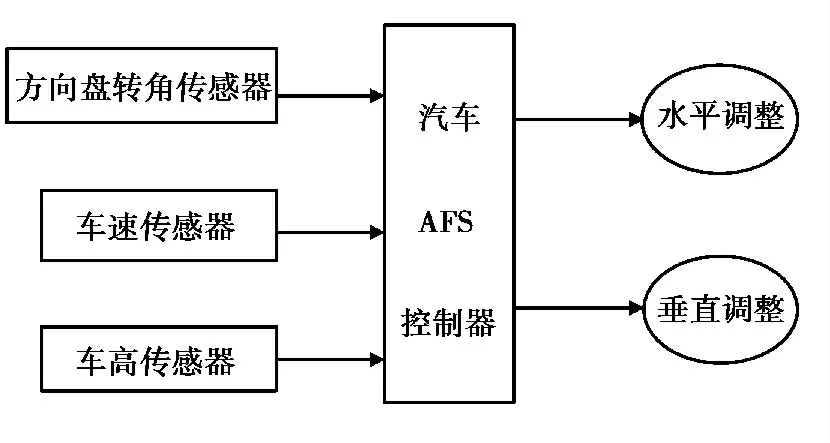
图1 汽车AFS 的组成
1.1 汽车安全刹车距离
汽车安全刹车距离是从驾驶员踩下制动踏板的时刻到汽车在制动力的作用下完全停止的时刻,这段时间内汽车所行驶的路程,由刹车距离和反应距离两部分组成。辽宁省交通管理局研究的一组实际刹车距离数据,如表1 所示。

表1 汽车车速与安全刹车距离对应
由表1 可知,随着车速的增加,刹车距离增加,且车速越高,刹车距离的增加幅度越大。在实际驾驶中,车速是连续变化的,因此需要建立车速和安全刹车距离的连续函数关系式。
将表1 的10 对数据进行曲线拟合,即可得到相对应的连续函数关系式。利用MATLAB 可实现最小二乘法曲线拟合,二次函数拟合结果得到的汽车安全刹车距离计算公式为

式中,v——汽车车速(km/h);
S——安全刹车距离(m)。
1.2 前大灯水平调整角度
影响前大灯水平调整角度的因素主要有车速和弯道半径。根据转向盘与前轮之间的关系可以得到前轮转角角度,再根据阿克曼转向几何原理计算弯道半径。系统根据检测到的转角、车速信号,经AFS 控制器发出相应指令至汽车前大灯驱动系统,驱动前大灯水平转动,以调整照射角度。
根据阿克曼转向原理,得到转弯半径公式:

式中,D——汽车轴间距(m);
R——内侧车轮转弯半径(m);
δ——内侧车轮转角(°)。
当汽车进入弯道时,以汽车安全刹车距离作为汽车前大灯有效照明距离判定标准,照明需覆盖安全刹车距离S。根据前大灯水平偏转角θ、安全刹车距离S、转弯半径R之间的几何关系可得到前大灯水平转角θ 的计算公式

式中:θ——前大灯水平转角(°);
R——转弯半径(m);
v——车速(km/h)。
根据公式(3)可知,当转弯半径较小时,前大灯调整角度θ 将增大,这可能超过实际前大灯调整系统的最大允许角,造成电机烧毁,所以需要对公式(3)进行修正。为提高前大灯使用寿命,将公式(3)减去10度,修正为
汽车转弯时,外侧大灯需要提供前方照明,内侧减少盲区,所以外侧前大灯水平转角应小于内侧前大灯水平转角。一般外侧前大灯水平调整角度约为内侧的1/3。
资料表明,外侧前大灯水平调整角度最大为5°,内侧前大灯水平调整角度最大为15°。将式(2)代入(4)中,最后得到内侧大灯调整角度为

外侧大灯调整角度为

1.3 前大灯垂直调整角度
汽车在行驶时,车速越高要求前大灯照射距离就越远,以便给驾驶人足够的反应时间。另外,当汽车前后载重量变化或车辆加减速时,前照灯的照射方向就会改变。这些因素的变化都会产生行车安全隐患。为使前照灯保持在正确的高度,以避免给对向来车或前车造成眩光,同时又确保驾驶人和车辆的安全,需要对前大灯俯仰角度进行控制。
国家对汽车前大灯配光性能有严格的规定,配光性能要符合GB 4599—94。依据GB 4599—94 进行汽车前大灯配光测试时,汽车前大灯与配光屏幕的距离为25 m。过B 点的明暗截止线的水平部分在H-V 线的下面,且垂直距离为25 cm,点A 在H-V 线上方,且垂直距离为25 cm。由图2 可知,直线BB'与水平线的夹角为α,直线AB'与水平线之间的夹角为β。
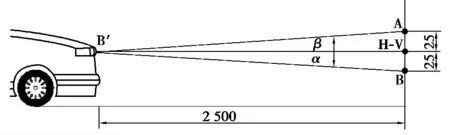
图2 汽车前大灯光线
为了确保驾驶员得到充足的照明视野并且考虑到不给对面来车驾驶员造成眩光情况,垂直向上调整角度不能超过角度β,汽车前大灯垂直向下调整角度不能超过角度α。由图2 可得

所以前大灯垂直转角上下限为0.6°。
2 汽车AFS 仿真
为了验证上述数学模型的正确性,笔者在MATLAB/Simulink 环境下建立了汽车AFS 仿真模型。汽车AFS 仿真模型系统如图3 所示。
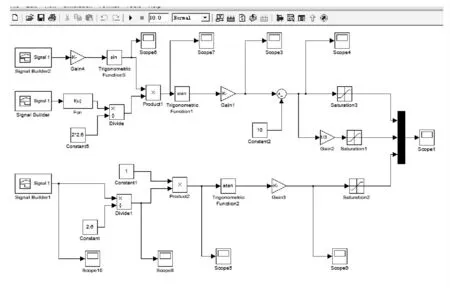
图3 汽车AFS 仿真模型系统
图3 中,车速、前轮转角、汽车前后轮高度差为汽车AFS 的信号输入量,可根据仿真需要设置其相应的波形,在前三个信号输入后,经过中间的模块进行运算,最后将结果输入“Scope”模块。在该模块可以观察到内、外侧前大灯理论水平调整角度和理论垂直调整角度的动态输出波形。
根据第1 节建立的水平和垂直方向的数学模型,利用MATLAB,在Simulink 环境下建立的AFS 仿真模型,通过改变车速、汽车前轮转角和汽车前后轮高度差输入信号,经过中间计算,输出相应转角波形。由上建立的仿真系统,取v=30 km/h,前车轮转角δ=30°,车前后轮高度差h=0.1 m,设置相关波形输入,经过中间模块进行运算,在“Scope”得到波形如图4所示。汽车垂直方向、汽车前轮外侧转角、汽车内轮转角详细波形分别如图5~图7 所示。

图4 Scope 波形

图5 汽车垂直方向转角波形

图6 汽车前轮外侧转角波形

图7 汽车内侧车轮转角波形
3 小 结
文章研究了汽车智能前大灯水平和垂直调整角度与车速等因素的数学模型。利用前大灯调整角度数学模型在MATLAB/Simulink 中建立了汽车AFS 仿真模型。从仿真结果来看文中给出的数学模型满足要求。根据研究的模型,AFS 控制系统可实时检测汽车转角、车速、车身高度变化,并按设定程序驱动前大灯进行水平和垂直照射角度的调节,以达到夜间行车安全的目的。
[1]雷雨海.前照灯智能化控制[J].交通科技与经济,2004(5):42~43
[2]房旭,姚勇,刘军,等.智能汽车前照灯系统研究[J].汽车技术,2006:17~20
[3]夏先扬.欧美国家汽车车速、前照灯与行车安全[J].安全技术,2009(6):20~23
[4]陈建林.基于驾驶模拟器的汽车AFS 系统控制策略研究[D].武汉理工大学,2009
[5]戎辉,龚进峰.AFS 系统关键技术研究[J].汽车电器,2008(5):15~18
[6]蒋勇平.汽车主动转向头灯系统的研究[D].华南理工大学,2010
[7]崔惠中,关智伟.智能前照灯系统(AFS)系统研究现状综述[J].天津工程师范学院学报,2008,3(1):47~54
[8]陈建林,吴青,等.汽车AFS 系统车灯转角动态模型研究[J].汽车技术,2010:45~47
[9]卫修明,张晓玲.随动转向汽车前大灯定位控制研究[J].安徽工程科技学院学报,2009,24(4):23~27
[10]刘建勋,邓天民.汽车前照灯随动转向规律分析与研究[J].客车技术与研究,2008(3):9~13
[11]李新良,迟永斌.汽车AFS 头灯随动转向规律研究[J].汽车技术,2011(8):36~39
[12]关志伟,崔惠中等.汽车AFS 前照灯转角动力学建模仿真分析[J].汽车技术,2009(5):64~68
[13]承维宠等.汽车行驶纵向安全距离具体数值的研究[J].湖北警官学院学报,2010(3):90~92
[14]侯小梅,刘建勋.汽车前照灯随动转向控制系统边界条件研究[J].重庆交通大学学报,2009,28(2):298~301
猜你喜欢
科技资讯(2019年1期)2019-04-27
汽车维护与修理(2018年7期)2018-10-13
科技资讯(2017年24期)2017-09-15
科技创新与应用(2017年19期)2017-07-08
汽车维护与修理(2016年4期)2016-11-26
中国塑料(2016年10期)2016-06-27
科普童话·百科探秘(2015年6期)2015-10-13
伴侣(2015年5期)2015-09-10
大众科学(2015年10期)2015-09-10
汽车零部件(2014年7期)2014-06-23
