
鲁棒控制在高速运动控制中的应用研究
2015-11-17 09:23:34尚美杰刘丹崔洁徐品烈肖雅静
电子工业专用设备 2015年12期
尚美杰,刘丹,崔洁,徐品烈,肖雅静
(中国电子科技集团公司第四十五研究所,北京 101601)
鲁棒控制在高速运动控制中的应用研究
尚美杰,刘丹,崔洁,徐品烈,肖雅静
(中国电子科技集团公司第四十五研究所,北京 101601)
半导体封装设备中对运动控制有着较高的要求,尤其对于需要高速运行的设备来说,传统的PID控制已经不能满足要求。研究了高速运动控制下鲁棒控制的应用,系统地介绍了一套H∞鲁棒控制器的设计方法,最后通过仿真及实验的例子验证了鲁棒控制在高速运动控制上的优越性。
鲁棒控制;H∞控制;高速运动控制
电机稳定可靠并且高性能的运行一直是运动控制工程师的追求,当然不同的设备对电机运动的要求也不相同。半导体设备向来对电机运动有着比较严格的要求,尤其是在高精度和高加速度上尤为突出。目前工程上普遍应用的还是基于PID的运动控制算法,该方法有易上手的优点,但是应用该方法时参数的调节通常需要采用在线试凑的方法,这样对于初始接触此方法的工程师来说无疑是一项挑战,并且采用此方法并不能发挥系统的最高性能,即使利用仿真获得最佳参数,也需要先获得控制对象的精确模型方可行,然而在实际的控制系统中,要得到控制对象的精确模型是很困难的,甚至是不可能的。因为实际的控制对象有着其本身的不确定性,并时刻会受到外界的干扰。因此我们要寻找一种解决方法,该方法使得当存在不确定性和干扰的情况下,反馈控制器仍然能够使系统稳定并满足要求。
进入20世纪80年代,专门用于分析和处理具有不确定性系统的控制理论-鲁棒控制理论产生了。鲁棒控制理论中引人注目的有H∞控制理论、结构奇异值理论和Kharitonov区间理论等,而H∞控制理论是目前解决鲁棒控制问题比较成功且比较完善的理论体系。H∞控制最早是从频域发展起来的。该方法目前形成了完整的一套理论体系,成为分析和设计不确定系统强有力的工具。
1 H∞控制理论
H∞控制可以归结为使某一闭环传递函数阵的H∞范数最小或者小于某个预先指定正数的控制方法,即H∞控制问题可以看成以式(1)为性能指标的最优控制问题。

2 标准的H∞控制设计
考虑如图1所示的系统,由输入信号u,w到输出信号z,y的传递函数P(s)称为广义被控对象,它包括实际被控对象和为了描述设计指标而设定的加权函数等。
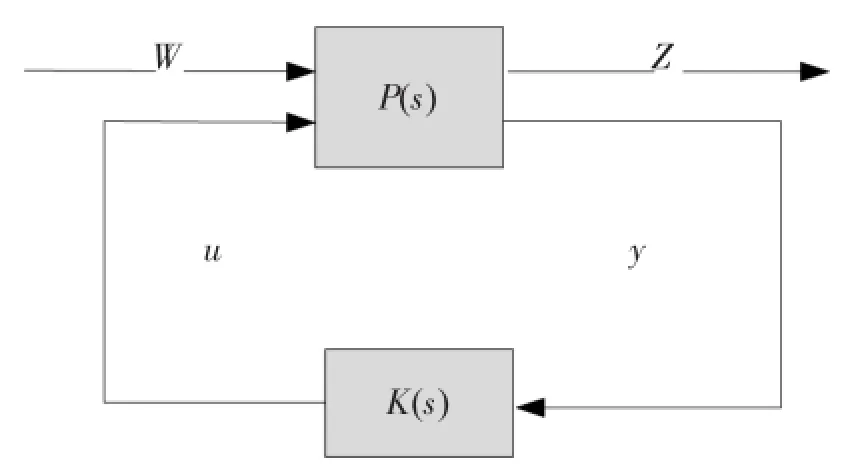
图1 标准的H∞控制问题
其中:
u为控制输入信号;
y为观测量;
w为外部输入信号(或者为了设计而定义的辅助信号);
z为被控输出信号(或者应设计需要而定义的评价信号);
K(s)为控制器。
设传递函数P(s)的状态空间实现由下式给出,即:

上式还可以表示如下:

从w到z的闭环传递函数为:

H∞标准设计问题即对于给定的广义被控对象P(s),判定是否存在反馈控制器K(s),使得闭环传递函数内部稳定,且。如果存在这样的控制器,则求之。
3 混合灵敏度优化问题
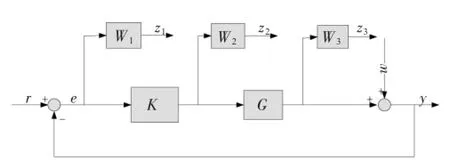
图2 混合灵敏度优化问题
实际当中许多的控制问题均可统一于标准的H∞控制问题。而H∞控制问题又包括灵敏度最小化问题、鲁棒镇定性问题、混合灵敏度优化问题,跟踪问题等。这里主要介绍混合灵敏度优化问题的解决方法,该方法在实际情况中应用比较多。
对图2所示的系统,令S=(I+GK)-1(灵敏度函数),R=K(I+GK)-1,T=GK(I+GK)-1(补灵敏度函数),则w到希望输出z1,z2,z3,的传递函数分别为W1S、W2R、W3T选取目标函数:

在该优化设计中W1,W2,W3的选择是至关重要的一步,加权函数间接反映了系统的各种性能指标要求,如系统的动态品质要求、鲁棒性要求、抗干扰能力的要求等。对于这3个权值函数的选取一般有以下原则。
W1的选取:在低频段,为了有效地抑制干扰的影响或精确地跟踪输入信号,W1的直流增益应大于误差比例系数和干扰抑制比例系数,且要求该增益值尽量大;而对于超出系统要求的高频范围则无严格的要求。所以W1一般应具有积分特性或高增益低通特性。
W2的选取:由于W2可以限制控制量的大小,可以防止系统在实际的工作过程中产生严重的饱和现象,基于此考虑W2的静态增益应该适当的大;然而当W2的幅值由小变大时,控制系统的剪切频率会由大变小,所以为了保证有足够的带宽,W2的静态增益应该适当地小。所以在实际的设计中W2的值要适当的选取,在混合灵敏度设计中一般选择为一常实数。
W3的选取:由于W3表示的系统的乘性不确定性的范数界,因此具有高通的特性。具有高通特性的W3,其上升斜率可取大一些,这样可以保证闭环系统对高频干扰的抑制。
4 仿真及实验结果
下面以某半导体封装设备中的电机模型为对象展开,借助于matlab里面的鲁棒控制箱进行仿真设计该模型的速度环参数,并从频域的角度分析该方法的优越性。
以下为所讨论的电机系统模型,该模型是通过大量的实验获得。


利用matlab鲁棒控制工具箱,求解相应的速度环控制器:

A,B,C,D,Ak,Bk,Ck,Dk,的值如下:


如图3从该速度环控制器的闭环频谱中可以看到该方法设计的控制器带宽达到500 Hz,充分利用了系统的带宽,而采用单纯的传统PID控制是比较难达到这样的带宽。令位置环控制为P控制(P=0.06)将该控制器应用在实际的电机系统中,位置环响应如图4,如果以1 μm为考察标准的话,运动指令结束后2 ms稳定在指定位置,可见其快速性。

图3 速度环闭环传递函数
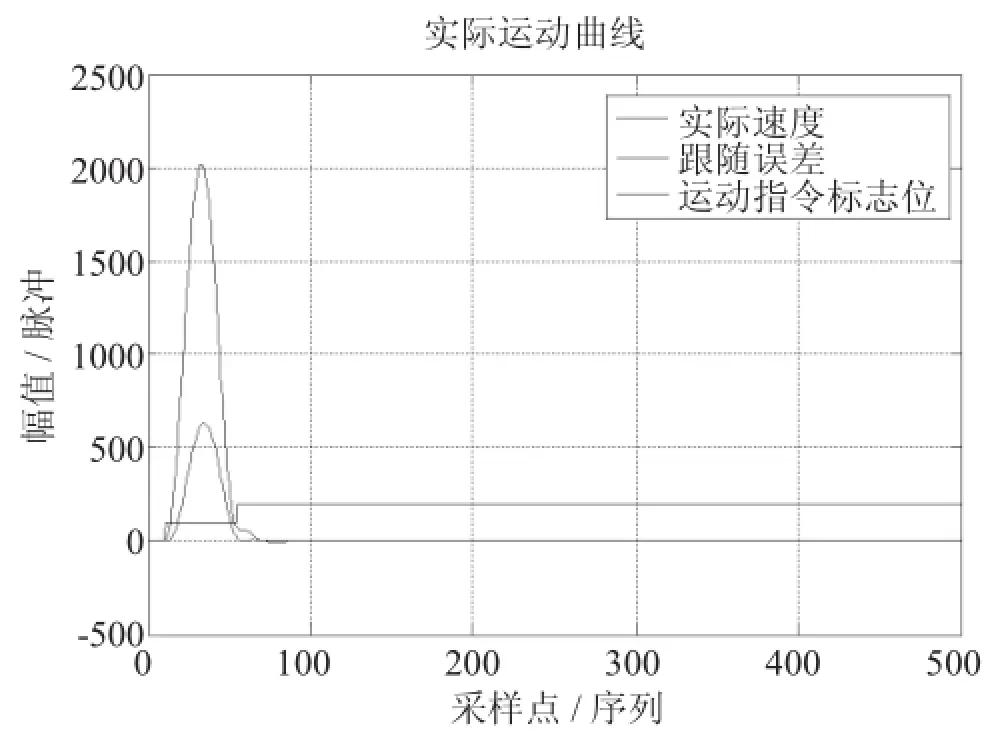
图4 实际电机运动曲线
5 总 结
本文系统地介绍了一种适用于高速运动控制系统的控制方法。该方法较传统的PID方法来说有其独到的优势,是基于抗干扰和模型不确定性考虑的控制方法,通过对某半导体封装设备上的电机模型进行仿真和实验验证,证明了该方法的有效性和优越性。
[1]黄曼雷.鲁棒控制理论及应用[M].哈尔滨工业大学出版社.2007.
[2]吴旭东,解学书.鲁棒控制中的加权阵选择[J].清华大学学报(自然科学版).1997,37(1):27-30.
[3]Alexander Lanzon.Weight optimisation in loop-shaping [J].Automatica,2005,(41):1201-1208.
[4]M.Osinuga,S.Para,A.Lanzon.Smooth weight optimazation in loop-shaping design[J].Systems and control letters,2010,(59):663-670.
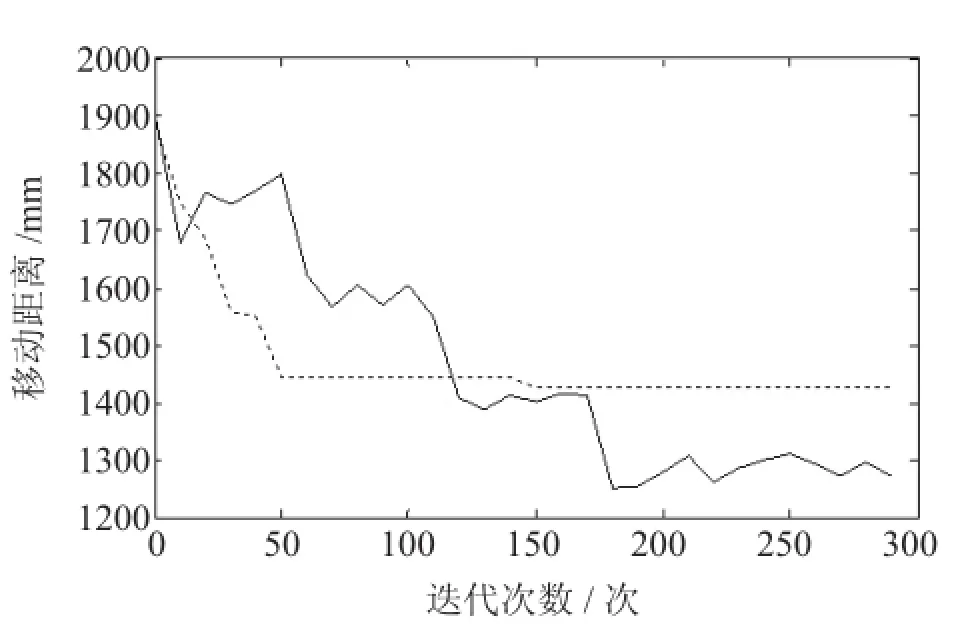
图4 单亲进化遗传算法和本文算法优化过程图(实线为改进遗传算法)
相比较前俩者,本文所提出的基于复合算子的改进遗传算法有相对更好的收敛性和全局性,目标函数值在后半段趋于全局最优解,是三种方法中最好的,能更好的完成贴装路径优化,提高贴装效率。
参考文献:
[1]K.Srihari,Sundarraman,Raghavan.A Process planning system for PCB assembly using TAB and SMT.[J]Advanced manufacturing technology.Springer-Verlag London Limited,1994,9:311.
对于油井压力、产液量、含水相对较高的“三高”井组,从油藏工程角度,对连通注水井进行方案跟踪调整,对高含水层下调水量,降低无效注水,2017年对21口井、39个注水层段进行了注水方案优化,控制无效注入水9.4×104m3,累计节约电量15.09×104kWh,在平衡注采关系的同时兼顾了节水节电。
[2]杜轩,李宗斌,贾晓晨.基于遗传算法的复合式贴片机贴装过程优化[J].西安交通大学学报,2009(5):86-90.
[3]曾又姣,金烨.基于遗传算法的贴片机贴装顺序优化[J].计算机集成制造系统,2004,10(2):205-208.
[4]雷霆,徐凯.多头拱架型贴片机贴装顺序优化[J].计算机测量与控制.2006,14(9):1185-1187.
[5]袁鹏,刘海明,胡跃明.高速高精度多功能贴片机及产业化关键技术研究[D].华南理工大学,2005.10.
[6]朱光宇,罗哲,陈志锦.基于差分算法的贴装顺序优化问题求解[J].中国工程机械学报,2012,10(4):391-397.
[7]俞国燕,郑时雄,刘桂雄,黄平.复杂工程问题全局优化算法研究[J].华南理工大学学报.2000.28(8):104-110.
[8]袁鹏,刘海明,胡跃明.基于伞布搜索法的贴片机贴装顺序优化算法[J].电子工艺技术,2007,28(6):316-320.
[9]翟梅梅,基于交叉算子改进的遗传算法求解TSP问题[J].淮南师范学院学报.2009.11(5):114-119.
[10]杜轩,李宗斌,高新勤,闫利军.基于遗传算法的转塔式贴片机贴装过程优化[J].西安交通大学学报,2008,42(3):295-299.
[11]M.O.Ball,Sequencing of Insertion in Printed Circuit Board Assembly[J].Operations Research.1988,36(2):192-201.
[12]Nevalainen.Optimization of the movements of a component placement machine.European Journal of Operational Research.1989,38:167-177.
[13]Burke Edmund,New models and heuristics for component placement in printed circuit board assembly.In Proceedings of the1999 IEEE International Conference on Information.1999:133-140.
[14]袁鹏,刘海明,胡月明.基于伞布搜索法的贴片机贴装顺序优化算法.电子工艺技术.2007,(l):316-350.
[15]杜轩,李宗斌,高新勤等.基于遗传算法的转塔式贴片机贴装过程优化.西安交通大学学报.2005,(3):295-299.
[16]田福厚,李少远.贴片机喂料器分配的优化及遗传算法求解.控制与决策.2005,20(8):959-956.
The Application of Robust Control in High Speed Motion Control
SHANG Meijie,LIU Dan,CUI Jie,XU Pinlie,XIAO Yajing
(The 45thResearch Institute of CETC,Beijing 101601,China)
Semiconductor packaging equipment requires higher performance in motion control. Traditional PID control can not satisfy the equipment especially needing to run in high speed.This article studies the application of robust control in high speed motion control.A set of robust control based on H∞is introduced.Finally,simulation and example in laboratory prove the superiority of robust control in high speed motion control.
Robust control;H∞control;High speed motion control
TM301.2
A
1004-4507(2015)12-0042-05
2015-11-23
猜你喜欢
自动化学报(2019年6期)2019-07-23 01:18:22
测控技术(2018年7期)2018-12-09 08:58:46
厦门理工学院学报(2016年1期)2016-12-01 04:50:41
北京航空航天大学学报(2016年7期)2016-11-16 01:51:01
光学精密工程(2016年4期)2016-11-07 09:05:39
系统工程与电子技术(2016年4期)2016-08-24 07:46:18
电子工业专用设备(2015年4期)2015-05-26 09:10:40
电子工业专用设备(2014年8期)2014-09-17 01:50:14
电子工业专用设备(2014年2期)2014-08-09 07:41:48
电子工业专用设备(2014年4期)2014-07-04 01:42:34
