高速公路平直路段雾霾天气下的IDM跟驰模型分析
2015-11-09 01:31:22王嘉宇李泽州张家伟涂辉招同济大学道路与交通工程教育部重点实验室上海201804
交通运输研究 2015年1期
王嘉宇,李泽州,张家伟,涂辉招(同济大学道路与交通工程教育部重点实验室,上海 201804)
高速公路平直路段雾霾天气下的IDM跟驰模型分析
王嘉宇,李泽州,张家伟,涂辉招
(同济大学道路与交通工程教育部重点实验室,上海 201804)
雾霾等恶劣气候对交通安全带来严重威胁。为分析雾霾天气下驾驶行为规律,利用高逼真度驾驶模拟器,构建了高速公路平直路段雾霾天气场景,开展了自由加速、紧急制动和跟驰试验;基于采集的试验数据利用遗传算法对IDM(Intelligent Driver Model)跟驰模型进行了标定,并与晴天同路段标定参数进行了对比分析。结果显示,雾霾天气下IDM模型中起步加速度和舒适减速度参数并无显著差异,但安全距离、安全车头时距、期望速度等参数比晴天情况显著减小,由此表明雾霾天气下的交通冲突风险显著增大,应加强雾霾天气下的安全管理。
IDM跟驰模型;雾霾天气;遗传算法;模型验证;高逼真驾驶模拟器
第1卷 第1期|2015年2月
0 引言
霾是一种大量极细微的干尘粒均匀地浮游在空中,使水平能见度小于10.0km的空气普遍混浊的天气现象[1]。雾霾是雾和霾的组合词,尽管两者存在能见度、颜色、相对湿度的差异,但我国不少地区已把阴霾天气现象统称为“雾霾天气”。雾霾天气的突发性和能见度显著下降对驾驶员的驾驶行为造成了很大的影响。祝站东[2]定量研究了能见度对行车速度的影响,即在一定范围内能见度每降低50m,行车速度大约会下降15%。赵佳[3]利用驾驶模拟器分析和讨论了雾天对各风险层级的驾驶行为的影响。
微观车辆跟驰模型是交通仿真的基础。跟驰模型在20世纪50年代由Herman提出,Reushel和Pipes开始研究。截至现今60余年以来,学者们对跟驰模型已进行了大量研究,并提出诸如刺激反应模型[4]、生理-心理模型[5-6]、安全距离模型[7]、期望车头间距模型[8]等众多的跟驰模型。2002年,D.Helbing等人基于广义力模型提出了智能驾驶员模型(Intelligent Driver Model,简称IDM)[9]。朱山江改进了IDM模型在期望距离非负和反应时间上的缺陷,并研究了车队在信号灯前停止和再启动的行为[10]。Treiber采用线性加和的方式将IDM扩展为多车模式,即将前方若干辆车与目标车辆的速度差、间距分别代入IDM并计算出多车加速度,再求和得到综合的加速度[11]。敬明将反应时间和车型作为车辆的个体特征加入到IDM模型中,并对信号灯放行状态和稠密交通流扰动传播进行了仿真[12]。陈喜群提出了考虑前方多车影响的一般化IDM模型,并加入了非线性权重指标的影响,通过线性稳定性理论分析,得到了新模型的一般化稳定条件[13]。
纵观以往众多跟驰模型研究,车辆跟驰模型的标定与验证所选用数据绝大多数是基于正常驾驶条件下的交通流数据,少有在雾霾天气下对模型进行标定。同时我国交通环境、交通流构成、驾驶员心理特性等方面与国外有着较大差异,并缺乏雾霾天气下跟驰模型的实测。因此,研究雾霾天气下驾驶员跟车行为,建立车辆跟驰模型,对减少雾霾天气下的交通事故,建立相应应急疏散措施具有重要的现实意义。
1 试验设计
本试验招募了21名拥有驾照的熟练驾驶员作为试验人员,均为男性。在预试验中有1名驾驶员出现了头晕现象,其余20名驾驶员均能很好地适应驾驶模拟器。表1为试验样本的基本信息。试验仪器采用同济大学8自由度驾驶模拟器。试验场景选取了高速公路上的平直路段,设计车速为120km/h,双向4车道,坡度小于3%,试验的前后车均为小客车,车长5m。在试验车道以外的车道不设置旁车,避免对试验产生干扰。
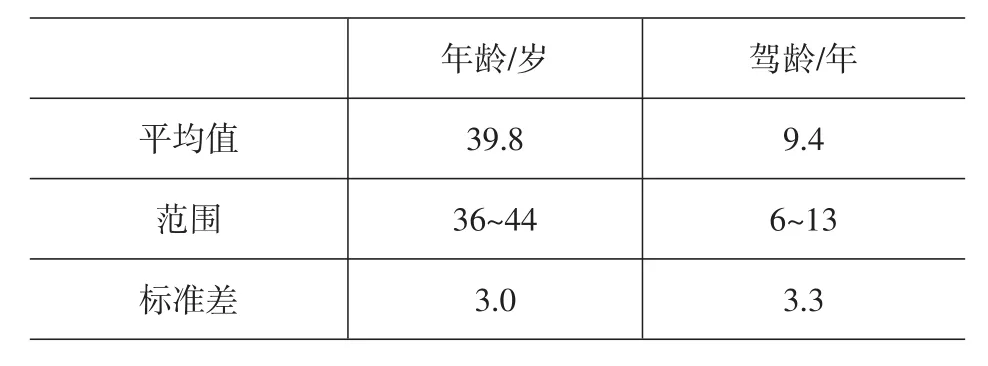
表1 试验样本基本信息
试验自变量为能见度,取浓雾下80m为设置能见度,并设置晴天作为对比。试验中,参考了《风、雨、雾、雪天气等级划分标准》中雾的等级对应的能见度范围,见表2,同时考虑了驾驶模拟器中环境变量的设置程度对驾驶员模拟试验时感官的刺激。
本研究由4个试验组成:预备试验、自由加速试验、紧急制动试验和跟驰试验。
(1)预备试验
驾驶员被告知操作规范并在试验场景中自由驾驶5min。在此过程中,驾驶员将经历加速、减速、平稳行驶的过程,掌握踩踏油门和刹车板的动作。5min的试驾结束后,驾驶员将填写一份问卷,以此来确定是否有“模拟器病”。若驾驶员没有“模拟器病”,休息5min后正式开始试验。
(2)自由加速试验
驾驶员在自由流的情况下,按照自身驾驶习惯加速到期望速度vo并维持该速度30s,听到减速指令后,按照自身驾驶习惯减速至vo2并维持该速度30s,最后按照自身驾驶习惯减速至0。每位驾驶员重复以上过程2次。
(3)紧急制动试验
前车以0.8m/s2的加速度从0加速到100km/h,驾驶员驾驶后车跟随前车行驶。当后车行驶距离超过2km且与前车的车头时距大于1.5s时,屏幕显示“SPEED UP”字样,提示驾驶员靠近前车,使车头时距小于1.5s;当后车与前车车头时距小于1.5s并保持2s以上时,前车以4m/s2的减速度突然刹车,驾驶员经过反应后,紧急制动防止追尾。驾驶员轮流试验,每人每两次试验间隔10min,以消除紧张感,使试验更真实。每位驾驶员重复以上过程2次。
(4)跟驰试验
在晴天和80m能见度雾霾天气下分别观测前车速度随时间的变化。晴天前车速度分为四个阶段:加速阶段、高速平稳阶段、减速阶段和低速平稳阶段。加速阶段经历3s加速度为0.7m/s2的短时加速和42s加速度为0.8m/s2的加速到达110km/h。高速平稳阶段速度在100km/h和120km/h之间小幅度加减速。减速阶段从100km/h以1.5m/s2的减速度减速到40km/h。低速平稳阶段,速度在40km/h和60km/h之间小幅度加减速,如图1所示。80m能见度雾霾天也包括加、减速阶段和平稳阶段,具体划分如图2所示。
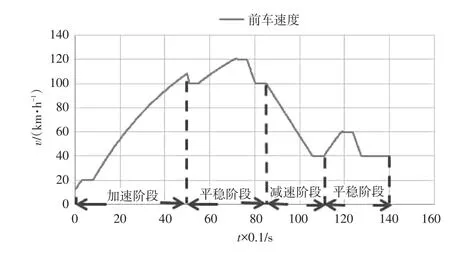
图1 晴天前车v-t图
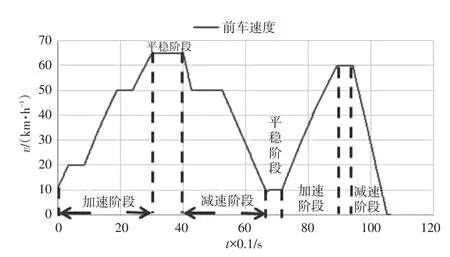
图2 80m能见度雾霾天气前车v-t图
2 IDM跟驰模型
IDM(Intelligent Driver Model)模型的参数数量少、意义明确且与经验符合很好,并能用统一的模型描述从自由流到完全拥堵流的不同状态。以下将IDM模型简化为适用于交通流密度较小、平衡流状态、高速接近时的紧急刹车状态下的三种形式[11],并分别加以分析。
2.1模型形式
IDM模型中假定后车加速度aα为后车速度vα、前后车相对距离sα以及与前车速度差Δvα的连续函数,公式如下:


另外,有:

式中:lα表示车长,只与车型相关。
2.2模型分析
2.2.1交通流密度相对较小

这表明后车加速度为其速度的减函数,当vα=0时,加速度最大为a;当vα=v0时,达到期望速度值,加速度为0。加速度指数δ表征了加速度下降的方式(见图3)。当δ→∞时,后车以恒定加速度达到期望速度;当δ=1时,加速度由松弛时间τ=v0/a的指数关系决定,在这种情况下IDM模型和气体动力学模型相似。
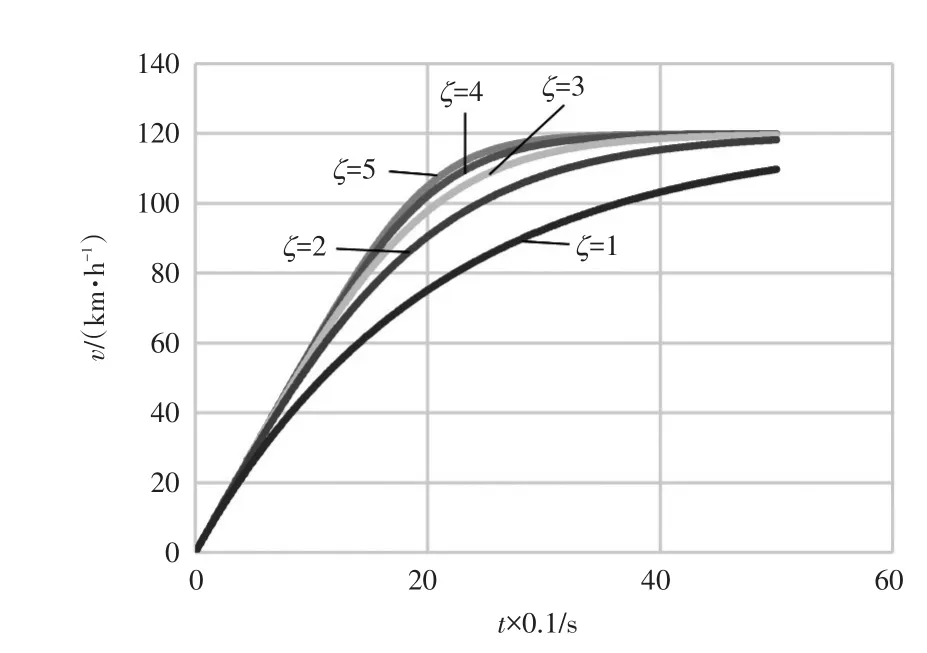
图3 期望速度为120km/h、加速度指数d d=1~5时的v-t图
2.2.2平衡流状态
在平衡流状态中,后车aα≈0,Δvα≈0,后车与前车保持一个平衡跟车距离 se() vα,由式(1)、式(2)联立可以得到:

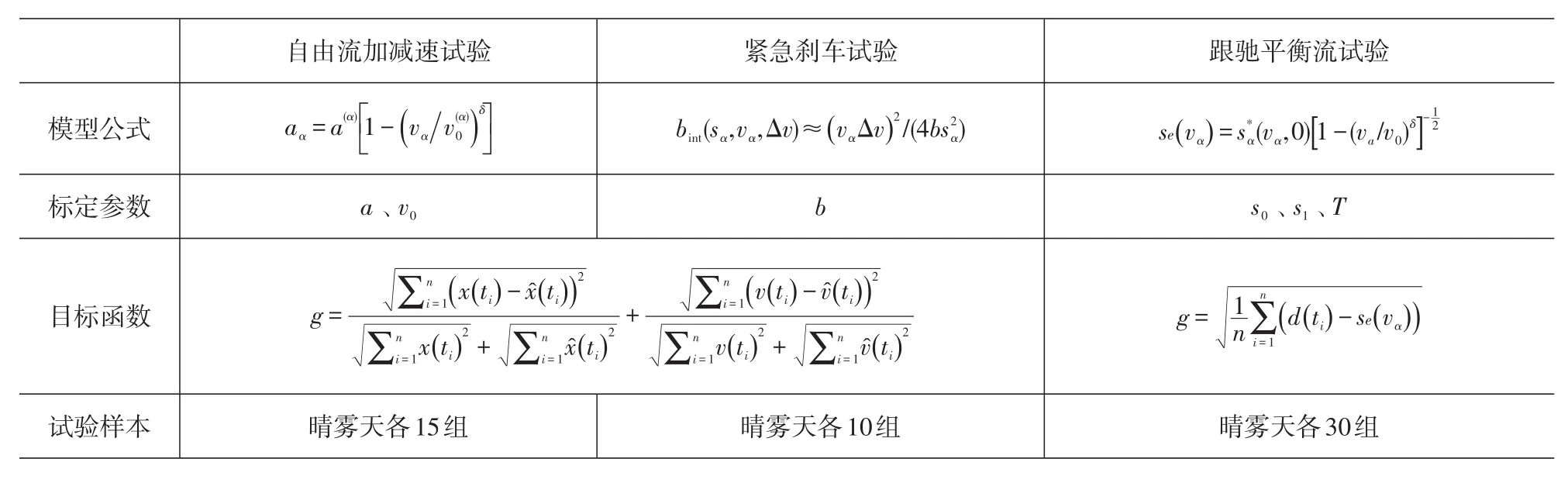
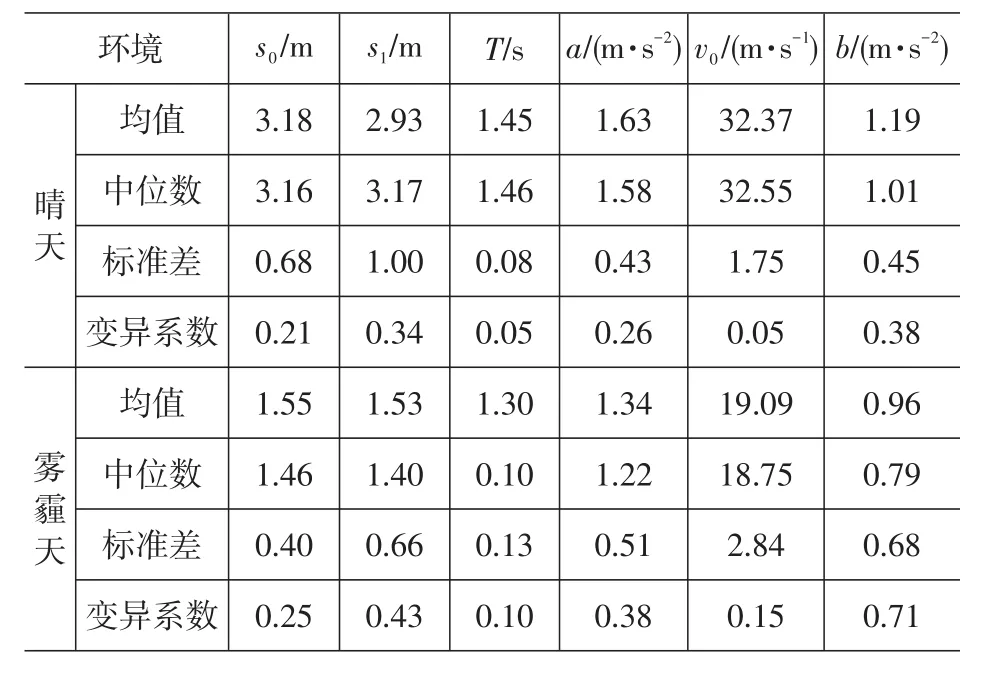
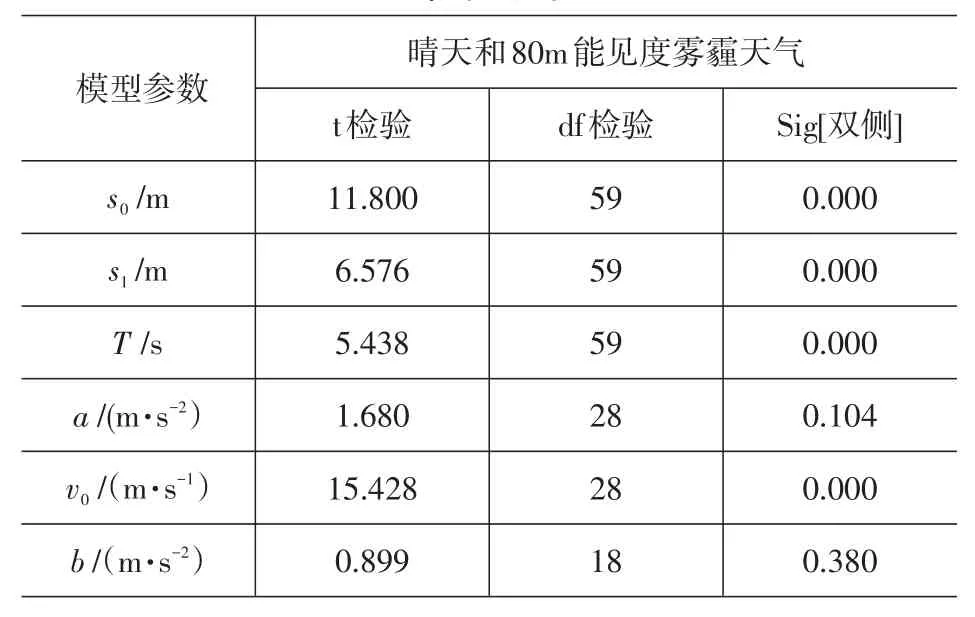
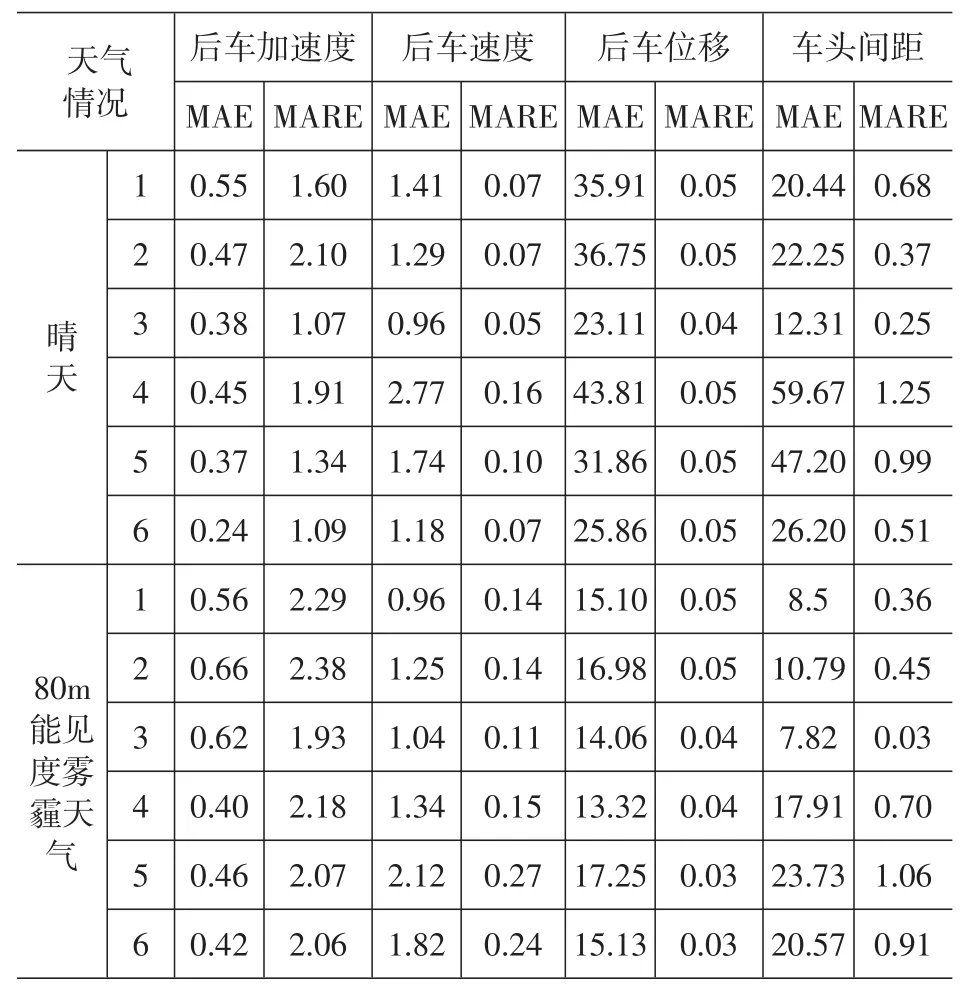
特别的,当交通流为拥堵平衡,即 vα< 2.2.3高速接近时的紧急制动过程 当后车以高速接近静止的前车时,式(2)中的平衡项s0+vαT相对非平衡项vαΔvα/2ab可以近似地忽略,此时后车制动减速度项可以表示为: 这个式子反映了智能减速行为。特殊的,当后车以速度v驶向静止前车时,即Δv=va,由动力学方程可以得到不发生碰撞的最小减速度为: 将式(8)代入式(7)得到: 其中 β=bmin/b,所以当 β≤1时,碰撞不会发生,即要求舒适减速度b≥bmin,从而在与前车处于安全距离的时候,IDM模型的制动减速度小于动力学的最小减速度,而当后车与前车的距离越来越近时,驾驶员会采取更大的减速度来避免碰撞。这和实际情况非常吻合。 2.3模型标定方法 由上述三个试验(自由加速试验、紧急制动试验、跟驰试验)获取的试验数据包括前后车速度、前后车加速度、后车位移和跟驰距离等。根据美国HCM(1994版)[14]和何民[15]等人对于跟驰状态判定的研究,以车头时距≤5s作为判定跟驰状态的指标并对原始数据进行删选。 以删选后的前后车速度、前后车加速度、后车位移和跟驰距离作为已知量,通过IDM模型得到仿真值,优化目标为表3所示的目标函数;利用遗传算法对模型进行标定,标定结果如表4所示。 表3 IDM模型标定方法 表4 晴天和80m能见度雾霾天气模型参数描述统计 下面分别对几项重要的试验参数进行数理统计和分析。各指标在95%置信度下的双侧t检验结果如表5所示。 表5 晴天和雾霾天模型参数95%置信度下双侧t检验结果 3.1静止安全距离参数s0 晴天和雾霾天静止安全距离的均值分别为3.18m和1.55m,晴天为雾霾天的2倍,而标准差分别为0.68m和0.40m,变异系数为0.21和0.25,说明晴天由于行驶车速较快,驾驶员倾向于保持较大的跟车距离。对s0进行95%置信度下的双侧t检验结果(见表5)表明晴天和雾霾天差异明显。 3.2与速度相关的安全距离参数s1 晴天和雾霾天与速度相关的安全距离参数的均值分别为2.93m和1.53m,晴天也几乎为雾霾天的2倍,其标准差分别为1.00m和0.40m。对s1进行95%置信度下的双侧t检验结果(见表5)表明晴天和雾霾天差异明显。该参数反映了速度变化对理想跟车距离的影响程度:由于晴天车速较快,跟车距离较大,速度的波动对跟车距离的影响更大。 3.3安全车头时距T 车头时距是评价驾驶安全性的重要指标,代表当前车刹车时,后车驾驶员所具有的最大反应时间,它不随本车速度的变化而波动[16],多受个人状态和环境影响较大。由试验得到的晴天和雾霾天安全车头时距均值分别为1.45s和1.30s,晴天略高于雾霾天,说明雾霾天驾驶员更加小心谨慎。其标准差分别为1.00s和0.40s,对T进行95%置信度下的双侧t检验结果(见表5)表明晴天和雾霾天差异明显。由于在驾驶模拟器中驾驶员的心理紧张程度较高,投入精力更多,晴天和雾霾天的安全车头时距都小于研究[17]得到的1.5s这一临界值。 3.4起步加速度a 晴天和雾霾天起步加速度均值分别为1.63m/s2和1.34m/s2,其标准差分别为0.43m/s2和0.51m/s2,表明晴天驾驶员起步时会选择较大的加速度,而雾霾天视线受到干扰采取谨慎起步。但是对a进行95%置信度下的双侧t检验结果(见表5)表明晴天和雾霾天无明显差异,表明能见度对起步加速度的影响不大。 3.5期望速度v0 晴天和雾霾天期望速度均值分别为32.37m/s和19.09m/s,其标准差分别为1.75m/s和2.84m/s。受能见度影响,雾霾天期望速度均值下降了41%,标准差增加了62%,可见雾霾天不同驾驶员的期望速度差异更大。这是由于不同的驾驶员对雾浓度感觉不同,可以承受的心理阈值也不一样,趋向于开到不同的期望速度,而晴天驾驶员在自由流状态下驾驶员都趋向于开到限速120km/h左右。对v0进行95%置信度下的双侧t检验结果(见表5)表明晴天和雾霾天差异明显。 3.6舒适减速度b 晴天和雾霾天舒适减速度的均值分别为1.19m/s2和0.96 m/s2,表明晴天驾驶员的舒适减速度略大于雾霾天,而其标准差分别为0.45m/s2和0.68m/s2,对b进行95%置信度下的双侧t检验结果(见表5)表明晴天和雾霾天无明显差异,这也表明在减速过程中能见度对舒适减速度的影响不明显。 以往对跟驰模型的参数标定多将输入数据代入模型中,计算得到一系列输出值(多为加速度),计算与实际加速度值的误差,从而评估模型的效果,但是这种方法不能够完全反应连续数据中误差的累计对模型效果的影响[18]。本文采取了基于过程的方法对模型进行检验,选取后车的初速度、初始跟车距离以及前车的速度作为模型的输入,然后根据标定的IDM模型得到整个跟驰过程中的后车驾驶行为。 选取未参与标定的数据进行模型验证,晴天和雾霾天各有6组数据。通过计算得到后车的加速度、速度、位移和两车车头间距的平均绝对误差(MAE)和平均相对误差(MARE)的值,如表6所示。由此可以判定:速度和位移的模型输出值与实测值的误差较小,整体模拟效果较好。 表6 IDM模型输出结果 其中,MAE和MARE按照下式进行计算: 式中:yi为实测值;ŷl为模型输出值;n为样本数。 跟驰模型是微观交通仿真的重要模型,IDM模型用统一的模型形式描述了从自由流到完全拥堵流的不同状态,且所用参数数量少、意义明确并与经验符合很好。本文以IDM模型为例,利用8自由度驾驶模拟器进行试验,得到前后车的加速度、速度、位移等实测值,通过遗传算法进行模型参数的标定,得到了六个模型参数在80m能见度雾霾天气和晴天的值。结果表明,能见度对静止安全距离参数、与速度相关的安全距离参数、安全车头时距、期望速度有显著影响,而对起步加速度和舒适减速度无显著影响。分析中也发现驾驶员的年龄、驾龄对参数有影响,例如年长的驾驶员安全车头时距较年轻驾驶员会稍大些,但是由于试验开展不易,试验样本数不足,难以对驾驶员性别、年龄、驾龄等特征对模型参数的影响作出定量分析。后续将开展低能见度下驾驶行为在微观交通仿真的应用,同时扩展雾霾天气下考虑反应时间、驾驶员属性和前方多车影响的跟驰模型的研究。 [1]中国气象局.地面气象观测规范[M].北京:气象出版社,2003. [2]祝站东,荣建,周伟.不良天气条件下的驾驶行为研究[J].武汉理工大学学报:交通科学与工程版,2010,34 (5):1040-1043. [3]赵佳.基于驾驶模拟试验的雾天对驾驶行为影响的研究[D].北京:北京交通大学,2012. [4]Gazis DC,Herman R,Potts RB.Car-Following Theory of Steady-State Traffic Flow[J].Operations Research,1959,7 (4):499-505. [5]Fritzsche H-T,AG D-B.A Model for Traffic Simulation[J]. Traffic Engineering and Control,1994,35(5):317-321. [6]M.VA.Single Regime Speed-Flow-Density Relationship for Congested and Uncongested Highways[C]//Transportation Research Board 74th Annual Meeting.Washington D.C.: TRB,1995. [7]Gipps PG.A behavioral car-following model for computer simulation[J].Transportation Research Part B:Methodologi⁃cal,1981,15(2):105-111. [8]MF A,RF B.A Linear Acceleration Car-Following Model Dev Elopment and Validation[C]//Transportation Research Board 77th Annual Meeting.Washington D.C.:TRB,1998. [9]D.Helbing.Micro-and Macro-Simulation of Freeway Traffic [J].Mathematical and computer modelling,2002(35):517-547. [10]朱山江,屈山,史其信.对智能驾驶员模型的改进及其应用[J].中南公路工程,2006,31(3):135-139. [11]M T,A H,D H.Congested Traffic States in Empirical Ob⁃servation and Microscopic Simulations[J].Physical Review E,2000,62(2):1805-1824.[12]敬明,邓卫,刘志明,等.基于车辆个体特征的IDM模型研究[J].交通信息与安全,2012,30(5):10-13. [13]陈喜群,杨新苗,史其信,等.智能驾驶员模型及稳定性分析[C]//第五届中国智能交通年会暨第六届国际节能与新能源汽车创新发展论坛优秀论文集(上册).北京:电子工业出版社,2011:87-92. [14]National Research Council.Special Report 209:Highway Ca⁃pacity Manual[M].3rd ed.Washington D.C.:TRB,National Research Council,1994. [15]何民,荣建,任福田.判定跟驰状态的研究[J].公路交通科技,2001,18(4):74-78. [16]Taieb-Maimon M,Shinar D.Minimum and Comfortable Driving Headway:Reality Versus Perception[J].Human Factors,2001,43(1):159-172. [17]Lewis-Evans B,Waard DD,A.Brookhuis K.That's Close Enough—A Threshold Effect of Time Headway on the Ex⁃perience of Risk,Task Difficulty,Effort,and Comfort[J]. Accident Analysis&Prevention,2010,42(6):1926-1933. [18] 王殿海,陶鹏飞,金盛,等.跟驰模型参数标定及验证方法[J].吉林大学学报:工学版,2011,41(1):59-65. Intelligent Driver Model in Haze Weather on Straight Section of Expressway WANG Jia-yu,LI Ze-zhou,ZHANG Jia-wei,TU Hui-zhao Adverse weathers like haze weather pose a serious threat to traffic safety.A high fidelity driv⁃ing simulator was used to investigate the influence of haze weather condition on driving behavior.Scenar⁃ios with clear and haze weather conditions on straight section of a expressway were set up for the investi⁃gation,for which the weather conditions were defined by the visibilities.The three stages of free accelera⁃tion,emergent braking and car-following were conducted.Then,based on the experimental data,the ge⁃netic algorithm was proposed to calibrate the IDM(Intelligent Driver Model)car-following model.The re⁃sults show that the haze weather condition has no significant influence on the start acceleration rate and the comfortable deceleration rate,but it significantly reduces the safety distance,the safety distance headway,the expected speed in IDM car-following model.This implies that the emergency traffic man⁃agement should carefully pay attention to the significant increased potential safety conflicts in case of haze weather. IDM(Intelligent Driver Model);haze weather;genetic algorithm;model validation;high fidelity driving simulator U491.254 B 2095-9931(2015)01-0086-06 10.16503/j.cnki.2095-9931.2015.01.015 2014-11-18


3 试验结果分析
4 模型验证
5 结语
(Key Laboratory of Road and Traffic Engineering of the Ministry of Education,Tongji University, Shanghai 201804,China)
猜你喜欢
疯狂英语·新读写(2021年8期)2021-11-05 08:44:28
阅读(低年级)(2021年2期)2021-04-08 02:16:27
汽车维修与保养(2020年11期)2020-06-09 05:42:16
Advances in Meteorological Science and Technology(2019年6期)2019-12-30 11:45:42
作文小学中年级(2018年6期)2018-06-28 05:51:22
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
光学精密工程(2016年3期)2016-11-07 09:03:34
中国交通信息化(2016年6期)2016-06-06 07:11:30
海洋气象学报(2016年3期)2016-02-28 14:27:42
气象研究与应用(2016年4期)2016-02-27 12:23:16