基于6—UPS并联构型的运动学建模与仿真
2015-11-04 12:11李晓刚林新峰胡耀增
山东工业技术 2015年21期
李晓刚+林新峰+胡耀增

摘 要:为了更好的对机构进行优化设计和了解机构的运动特性,对机构进行运动学仿真分析是一种常要的研究方法;本文针对6-UPS并联平台结构,用adams软件对其运动学的位移、速度、加速度进行仿真分析,并观察验证其合理性。
关键词:并联机构;6-UPS;adams仿真
DOI:10.16640/j.cnki.37-1222/t.2015.21.106
0 前沿
由于并联机构的设计和计算比较费时费力,因此研究者不断地在寻找一种实用的方法以解决这个问题,借鉴于新的科学技术,许多最新的高效的大型综合的动力学仿真软件都集成了许多强大的仿真和后处理功能,通过这些功能可以较快的建立仿真模型和对模型进行仿真研究,从而避免了求解繁琐的方程组。
1 6-UPS并联机构建模
通常一个复杂的并联机构包含许多简单的实体构件,本文在对设计和仿真结果不产生影响的情况下,对整个机构进行了必要的简化,并添加必要的约束。建立6-UPS并联平台简化后的虚拟样机模型如图1所示:
2 虚拟样机工作环境的设置
为了使样机模型仿真结果和后处理结果的输出方便,本文对影响虚拟样机的结果输出可能产生的影响的相关因素进行了相关修改设置:选取通用的国际单位制,设置适当比例和重力的方向;为了方便区别和找寻某个部件,对部件的名称进行了重命名,并用不同颜色进行区分。
建立完六自由度并联平台的虚拟样机模型后,添加各种约束来约束和限制多余的约束,确保各个构件组成一个完整的机械系统。
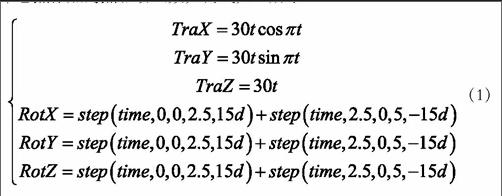
对虚拟样机添加完约束之后,然后添加相应的驱动,对动平台中心点添加的点驱动函数如公式如1所示:
(1)
3 并联平台运动学的仿真
由于力和力矩对并联平台作用的情况产生的影响不是很大,这里对其不在考虑。由于并联平台的运动不是某个构件的单一运动,而是许多构件的协调运动,因此其驱动函数复杂且难以准确的确定,因此在仿真时,本文从运动学逆解着手来研究,观察并且查看其是否发生部件相互干涉的情况和是否能够达到预期的运动状态。就并联平台而言,最能体现运动平台的运动性能的是空间螺旋线运动。本文在保证各个铰链在约束范围内转动,同时通过添加空间螺旋线运动来进行运动学仿真,其空间运动运行轨迹如图2所示。在运动平台运动公式用如(2)所示的函数表示动平台中心点的运动规律:
(2)
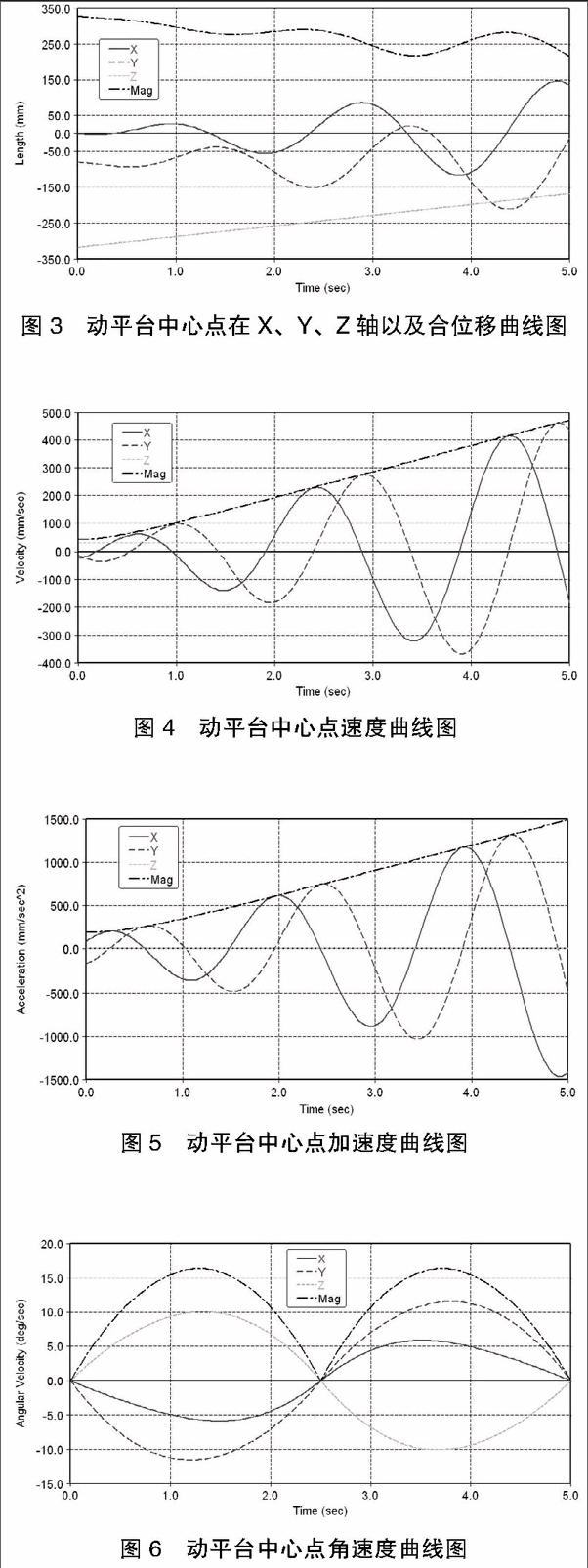
对动平台中心点添加方程组(2)所表示的运动函数,并对其进行逆解处理。在求解的过程中,动平台中心在X和Y轴都是做正弦运动,且振幅不断逐渐增加;而在Z轴则做直线运动,则此时动平台中心点的各参数个曲线如图3、4、5、6、7。
通过对图3可以分析,动平台中心点的位移沿Z方向做匀速直线运动,沿X和Y方向做振幅逐渐增大的正弦运动,合位移是X、Y、Z三个方向在空间的合成。
通过图4和图5可以看出,动平台中心点速度沿Z方向做匀速运动,加速度为零;速度和加速度沿X、Y方向做振幅逐渐增大的正弦运动;合成方向速度和加速度则是对应的各个方向速度在空间的合成。
从图6和图7可以看出,动平台中心点角速度和角加速度在X和Y方向先增大后减小,角速度是按照近似正正弦运动,以2.6秒为分界线,加速度在2.6秒取得最值;而在Z方向加速度呈现出是先减小后增大的变化趋势,在2.6秒达到了极小值。由于在2.6秒是角速度发生改变的时间,所以在角加速度的极大值发生在2.6秒,不论怎么变化,其合成角速度恒为正值。
4 结论
本文利用虚拟仿真分析软件强大的建模和分析功能,对并联机构进行仿真,并对速度加速度和位移分析,并对模型参数进行了优化设计,不仅缩短了研发周期的同时使得成本得到了降低,而且大大地提高了工作效率。
参考文献:
[1]王知行,陈辉,石勇.用七轴联动并串联机床加工汽轮机叶片[J].世界制造技术与装备市场,2002(06): 31-32.
[2]江崇民,王振宇,王哲元.XNZD2415型数控龙门并联机床简介[J].机械工程师,2003(02):53-54.
[3]黄玉美,史文浩,高峰等.混联式六轴联动数控机床6PM2的方案创新[J].制造技术与机床,2003(06):20-21.
[4]王希民,史家顺,胡明等.PTT滑块式并联钢锭修磨机床的开发[J].机械制造,2003(11):29-31.
[5]M. Weck,D. Staimer. Application Experience with a Hexapod Machine Tool for Machiningcomplex Aerospace Parts[J]. The 3rd Chemnitz Parallel Kinematics Seminar. Chemnitz,Germany,2002: 807-815.
作者简介:李晓刚(1986-),男,山东临沂人,硕士研究生,助教,研究方向:机械工程。endprint
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
装备制造技术(2020年4期)2020-12-25
电脑报(2020年12期)2020-06-30
河北省科学院学报(2020年1期)2020-05-25
电脑报(2019年4期)2019-09-10
制造技术与机床(2018年11期)2018-11-23
时代农机(2016年6期)2016-12-01
少儿美术·书法版(2016年1期)2016-02-06
海军航空大学学报(2015年1期)2015-11-11
环境科技(2015年4期)2015-11-08