考虑钢丝绳柔性的塔式起重机仿真系统开发
2015-11-04 06:19:33吕玉兰曹旭阳王殿龙
计算机工程 2015年9期
王 欣,吕玉兰,曹旭阳,王殿龙,焦 博,刘 磊
(1.大连理工大学机械工程学院,辽宁大连116023;2.大连益利亚工程机械有限公司,辽宁大连116025;3.中国科学院长春光学精密机械与物理研究所,长春130033)
考虑钢丝绳柔性的塔式起重机仿真系统开发
王 欣1,吕玉兰1,曹旭阳1,王殿龙1,焦 博2,刘 磊3
(1.大连理工大学机械工程学院,辽宁大连116023;2.大连益利亚工程机械有限公司,辽宁大连116025;3.中国科学院长春光学精密机械与物理研究所,长春130033)
针对塔式起重机司机培训和考核效率低、成本高、安全性差等问题,提出一种基于虚拟现实技术的培训考核仿真系统。在Virtools软件平台上构建交互式三维视景仿真系统,模拟司机在真实塔式起重机上的培训和考核操作,研究起升钢丝绳的悬链线方程,结合Virtools软件的物理系统,实现对钢丝绳的柔性仿真,包括钢丝绳的悬链线表达和摆动仿真,依据考核标准,建立考核评价体系,加入碰撞检测功能,实现考核评价机制,自动完成考核评价。仿真结果表明,该系统能较好地体现物体运动与碰撞的真实性,具有较强的可操作性。
动力学模型;硬件设备;悬链线方程;人机交互;虚拟现实
1 概述
塔式起重机(以下简称塔机)应用广泛,是国民建设的重要装备之一,但安全事故多发,保证和加强塔机的培训势在必行。在真实的塔机上进行培训与考核,不仅耗资大,而且受地域和环境的限制,有些特殊情况(如超重、超力矩)危险性大,难于在真实塔机上实现[1]。因此,塔机仿真培训系统成为一种新模式,在国内外都取得了较好的发展。
文献[2-4]对三维实体建模技术及模型优化技术进行了研究,并对塔机模型进行了简单的人机交互驱动。文献[5-6]分析和研究了视景系统建模中几何建模、运动学建模、碰撞检测等相关技术要点。文献[7-10]对塔式起重机的载荷摆动特性等动力学特性进行了分析,为塔机培训系统载荷运动的真实表现提供了很好的借鉴。其中,文献[7]结合计算机数学模型及塔机的力学物理特性,建立了基于开源物理引擎(Open dynamic Engine,ODE)的塔机的动力学模型;文献[8]利用V irtools中的物理模块创建了被吊物摆动模型;文献[9-10]建立了塔机的动力学模型,分析了载荷摆动特性,并在虚拟操作系统中再现了载荷的运动特性和摆动特性。文献[11]开发了相对完整的塔机模拟培训系统,并通过手柄与按钮控制虚拟场景中起重机的动作。文献[12-13]提出了塔机安装及驾驶培训系统的初步方案。文献[14]开发了一种多人虚拟安全培训系统,实现塔机虚拟装配。文献[15]研制了一种3D+的模拟器,通过佩戴相应头部设备,使视景可以根据操作者转动而随动。
上述文献多是对塔机虚拟培训装配技能的实现,且在模型的精细度和几何运动的复杂性方面都待进一步研究。本文从培训考核角度,研究实现相对完整的塔机培训考核仿真系统,通过结合实际司机室联动台座椅和六自由度平台等物理平台,使操作者具有作业的真实感,采用3DS M ax建立塔机及工作场景的三维模型,应用V irtools软件的物理特性体现塔机与重物的动作真实性。为突出逼真性,依据悬链线理论,对柔性起升钢丝绳进行实时仿真,依据考核标准,建立考核评价体系,真实反应考核场景与操作者动作,实现虚拟培训考核。
2 仿真系统设计
仿真系统由工作主机、并联六自由度运动平台、BARCO Gem ini被动立体投影系统、三维立体眼镜、联动台座椅以及电气控制柜等相关硬件设备构成。其系统结构如图1所示,各硬件设备如图2所示。本文系统的软件框架如图3所示,由三维建模、实时仿真、数据处理、系统功能实现4部分组成,并开发有软硬件设备的接口,实现人机交互。在模型的真实性体现方面,应用3DS M ax技术实现三维模型的逼真度,如图4所示。应用V irtools软件的物理特性实现钢丝绳与重物的摆动特性,并引入悬链线理论,实现钢丝绳的柔性仿真。在安全操作方面,建立起重机的各种安全限位机制、超载限制及速度控制,包括小车变幅限位、吊钩升降限位、力矩限制器和重量限制器等,以真实再现塔机的各种动作。

图1 仿真系统结构示意图

图2 仿真系统结构硬件设备组成

图3 塔机培训考核仿真系统软件框架

图4 塔机三维模型
图5 是力矩限制器控制程序脚本。为场景模型赋予物理属性,实现实时碰撞检测。在操作者操作的真实感方面,除常规视角控制外,还提供操作者视角控制和吊钩视角控制,如图6所示。将实际司机室安装在六自由度平台上,让操作者真实体验座椅、手柄和按钮的感受,以及实际场景中可能存在的动感。在人机交互方面,可方便建立和设置塔机、被吊物及环境参数,提供城市、沿海、山地等工作场景,显示起重机的信息状态及各种动作提示信息。建立考核评价系统,实现定点停放、绕杆运行与击落木块的考核仿真,给出操作者对重物的操作轨迹,对其动作规范程度与准确程度给予客观评判。本文系统的操作流程如图7所示,分为培训和考核两大模块。当操作者坐在司机室座椅上,佩戴三维立体眼镜观看屏幕后,即通过联动台座椅(或是鼠标键盘)与仿真系统进行人机交互,控制系统中模型的运动,鼠标键盘操作映射关系如表1所示。可感受六自由度平台振动和视景中模型做出的实时反应,体验最真实、最具有沉浸感的塔机仿真系统,完成在真实塔机上进行的各项培训和考核内容。

图5 力矩限制器的程序脚本

图6 操作者视角和吊钩视角

图7 本文系统操作流程

表1 鼠标键盘操作的映射关系
3 钢丝绳的柔性建模与仿真
从图8可以看出,塔机结构刚度大,在三维建模和动作仿真时,可以将其看作刚体,通过3D建模技术与相应运动学仿真技术即可实现其逼真性与运动特性。但其中钢丝绳部件往往因直径小长度大而表现出明显的柔性特性,空载时更为明显,吊载时,其柔性会导致重物的摆动,影响重物精确定位。为真实再现钢丝绳的柔性,本文引入悬链线理论,并应用V irtools软件中的物理特性,来表现钢丝绳与重物的摆动特性。

图8 塔机起升钢丝绳的悬垂效果
根据作业情况,首先对钢丝绳做如下假设[16]:
(1)钢丝绳只承受轴向拉力,不承受压力以及弯矩。
(2)钢丝绳在线弹性范围内工作。
(3)钢丝绳自重均布,形成悬链线的形状。
(4)悬链在滑轮处的张力,由吊钩和重物重力总和产生,起升倍率不同时,张力不同。
对钢丝绳进行受力分析,如图9(a)所示。取微元段,如图9(b)所示,可求得悬链线方程:

其中,a=(λg)/H,λ是钢丝绳的线密度(kg/m),g是重力加速度(m/s2),H是微元段拉力T的水平分量(N);c1,c2是积分常数。

图9 悬链结构受力分析
由于C处的导数为0,又因:

可解得:

代回式(1),得关于悬链线系数a和最低点C的横坐标χC的悬链线方程:

结合各已知条件可以得下面的方程组:

其中,T1为钢丝绳在B点的拉力(N);α为B点处T1与X轴的夹角;χB,yB为B点处的横纵坐标;β为塔机起重臂与水平方向的夹角。方程组式(4)为超越方程组,以α,χC为变量,应用数值逼近法对求解,求解流程如图10所示,可以求得关于L,T1的悬链线方程。

图10 悬链线求解流程
根据所求得的悬链线方程,将其用SDK语言编程,利用Virtools中的3D Transformations/Curve相关BB(Building Blocks)完成钢丝绳实时显示,流程图如图11所示。

图11 悬链线在V irtools中的流程
程序脚本如图12所示。以小车幅度45 m空载和带载1 t为例,仿真效果如图13所示。从图中可以看出,空载和吊载工况下钢丝绳的柔性较为明显。

图12 钢丝绳的悬链线形式实时渲染的脚本程序
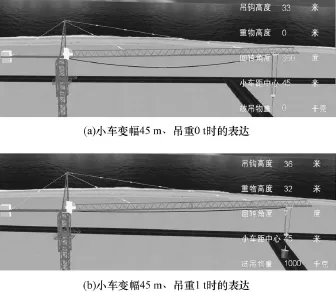
图13 起升钢丝绳在仿真系统中的表达
4 考核评价体系建立与仿真
本文系统依据《起重机司机安全技术考核标准》的考核办法、考核时间、考核评分标准,建立考核评价体系(考核评价标准如表2所示)。通过考核操作者的动作,对比考核标准,给出综合考核评价。在考核评价体系中,依据考核标准,设置2项考核内容:(1)吊起水桶定点停放;(2)吊起水桶在标杆内运行和击落木块。

表2 定点停放、绕杆运行和击落木块的考核标准
在进行操作仿真时,由于引入了钢丝绳的柔性特性,致使其带着被吊水桶出现摆动特性,这体现了真实的作业运动状态,摆动的幅度与频率会随操作者对动作操控的速度变化而变化,因此增加了操作真实性与难度。在考核过程中,重要的环节是挂钩、碰撞仿真及对操作结果的评判。2项考核内容都需要首先将吊钩挂在被吊水桶上,如果吊钩与水桶偏离过大,即便按下挂钩按钮,也始终挂不上钩,这将影响考核操作时间。为此,本文系统提供靶心闪烁提示功能,当吊钩落在可挂钩的区域内,会出现靶心闪烁,提示操作者可以进行挂钩,如图14所示。

图14 定点停放考核的仿真
为实现定点停放项目考核的结束动作,这里特别设置了摘钩按钮。如果操作者通过系统提供的司机室视角和吊钩视角判定被吊水桶到达指定位置,则可按下摘钩按钮,系统由此判断水桶是否完全落在指定位置的圆圈区域范围内,如果存在出圈情况,将按考核标准扣分。
对于绕杆运动与击落木块项目,其难点是被吊水桶绕杆过程中与杆的碰撞检测问题,这里是通过V irtools软件提供的物理模块实现的,将被吊水桶与杆均赋予物理特性,则可进行实时碰撞检测。但要特别注意两物体的物理特性匹配问题,若设置不当,将会出现碰到但不倒和一碰就倒的严重失真现象,因此,物体重要参数设置如表3所示。图15是绕杆运行和击落模块场景。

表3 绕杆运行和击落木块考核项目中模型的参数设置

图15 绕杆运行和击落木块考核仿真
最后记录操作轨迹,对不按操作规程操作的动作,如击落木块时到车,或定点停放过程中下降超过2次停顿等情况,进行扣分处理。
5 仿真算例
以定点停放考核项目为仿真算例。首先进入仿真系统,输入操作者信息,如图16所示。

图16 学员信息输入界面
然后选择定点停放考核项目,进入考核场景。计时开始,操作者完成相应考核动作,界面上显示起重机的工作状态,如图17所示。

图17 考核过程仿真
考核结束,系统显示被吊水桶的操作轨迹,如图18所示,对其动作规范性和准确性进行评判,最后给出考评成绩,如图19所示。

图18 操作轨迹绘制

图19 考核成绩评定
6 结束语
本文结合司机室联动台座椅、三维投影设备、立体音响等硬件设施,通过碰撞检测与物理系统,引入悬链线理论,真实再现场景中物体的柔性特征与运动特性,为操作者提供高沉浸感的操作环境。依据考核标准构建考核评价体系,实现评判机制,完成各项考核仿真,给出客观考核评价。算例结果表明,该系统操作具有真实性、合理性与高效性,为培训机构提供安全、高效、经济的培训考核途径。今后将用六自由度平台表现塔式起重机仿真系统的动感,包括获取控制六自由度平台运动的位姿参数,以及对PMAC运动控制卡进行编程驱动六自由度平台运动,以实现塔式起重机操作时的动感仿真。
[1] 刘佩衡.塔式起重机使用手册[M].北京:机械工业出版社,2002.
[2] 张佳福,董明晓,张 强,等.基于Creator的塔式起重机建模技术研究[J].起重运输机械,2008,(9):47-49.
[3] 朱翠兰,董明晓,邱鲁江,等.塔式起重机视景仿真系统场景建模与驱动[J].山东建筑大学学报,2012,27(3):284-288.
[4] 宋开功,陈清奎,李永帅,等.基于Virtools的塔式起重机模拟培训系统三维模型技术研究[J].机电产品开发与创新,2010,23(1):90-91.
[5] 王湛彬,高崇仁.塔式起重机模拟器视景系统建模技术的研究[J].机械工程与自动化,2008,(146):37-39.
[6] 万 华,周 凡,胡银丰.水下三维场景实时成像系统[J].计算机工程,2013,39(12):280-284.
[7] 杨珠敏.塔式起重机模拟系统实时仿真关键技术的研究与应用[D].武汉:武汉理工大学,2011.
[8] 陈登冲.基于Virtools的塔式起重机操作模拟培训系统[D].济南:山东大学,2011.
[9] 朱翠兰.塔式起重机虚拟操作系统建模技术研究[D].济南:山东建筑大学,2012.
[10] 徐书娟,董明晓,脱建智,等.运用VEGA软件实现塔式起重机载荷摆动仿真[J].起重运输机械,2010,(7):17-19.
[11] 丁 宾,刘海平,邵晓根,等.虚拟现实技术在塔吊模拟培训系统中的应用[J].制造业自动化,2012,34(10):135-137.
[12] 孟宪颐,刘 勇.虚拟现实技术在塔机司机训练培训中的应用[J].中国工程机械学报,2006,4(4):444-447.
[13] 韩秋楠,孟宪颐,李 芳.塔式起重机安装及驾驶培训系统的开发[J].建设机械技术与管理,2011,24(12):127-130.
[14] Li Heng,Greg C,Martin S.Multiuser Virtual Safety Training System for Tower Crane Dismantlement[J]. Journal of Computer in Civil Engineering,2012,26(5):638-647.
[15] Juang JR,Hung W H,Kang S C.Sim Crane 3D(+):A Crane Simulator with Kinesthetic and Stereoscopic Vision[J].Advanced Engineering Informatics,2013,27(4):506-518.
[16] 黄耀怡.大型动臂吊机起臂时臂架结构总稳定性设计[J].工程机械,2010,41(10):36-41.
编辑 刘 冰
DeveloPment of Tower Crane Simulation System Considering Flexibility of W ire RoPe
WANG Xin1,LV Yulan1,CAO Xuyang1,WANG Dianlong1,JIAO Bo2,LIU Lei3
(1.School of Mechanical Engineering,Dalian University of Technology,Dalian 116023,China;2.Dalian YILIYA Construction Machinery Co.,Ltd.,Dalian 116025,China;3.Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033,China)
Based on virtual reality technology,a simulation system for training and checking tower crane driver is developed to solve the problem of low efficiency,high cost and poor safety when using a real tower crane.In Virtools,an interactive 3D visual working environment is built,where a driver can simulate visual tower crane's operation with real operating feeling.The flexible simulation of w ire rope is the key problem.By catenary theory,hoisting rope's mathematics equation is built,and its flexible and swing simulation is studied with the physical functions provided by Virtools.According to relative standards and rules,automatic check and evaluation system is established,which is embed in this proposed simulation system.Simulation results show that this system can well reflect the authenticity of object motion and collision.And this system is excellent in operability.
dynamic model;hardware equipment;catenary equation;human-computer interaction;virtual reality
1000-3428(2015)09-0303-08
A
TP391
王 欣,吕玉兰,曹旭阳,等.考虑钢丝绳柔性的塔式起重机仿真系统开发[J].计算机工程,2015,41(9):303-310.
英文引用格式:Wang Xin,Lv Yulan,Cao Xuyang,et al.Development of Tower Crane Simulation System Considering Flexibility of W ire Rope[J].Computer Engineering,2015,41(9):303-310.
10.3969/j.issn.1000-3428.2015.09.056
中央高校基本科研业务费专项基金资助项目(DUT14ZD221);辽宁省高等学校创新团队支持计划基金资助项目(LT2014001);大连市科学技术计划基金资助项目(2013A16GX111)。
王 欣(1972-),女,副教授、博士,主研方向:数字教学,数字媒体,虚拟现实;吕玉兰,硕士研究生;曹旭阳,副教授;王殿龙,教授;焦 博,硕士;刘 磊,研究员。
2014-09-02
2014-11-04 E-m ail:wangxbd21@163.com
猜你喜欢
机械工业标准化与质量(2022年7期)2022-08-12 02:12:24
中国特种设备安全(2022年3期)2022-07-08 02:23:06
科学与财富(2021年33期)2021-05-10 14:54:29
无线互联科技(2018年20期)2018-12-27 11:36:00
测控技术(2018年5期)2018-12-09 09:04:14
中国特种设备安全(2018年12期)2018-03-15 05:35:30
温州医科大学学报(2016年9期)2016-10-31 07:47:26
哈尔滨医药(2015年4期)2015-12-01 03:58:01
筑路机械与施工机械化(2015年10期)2015-11-07 17:49:05
建筑机械化(2015年7期)2015-01-03 08:09:04