
OpenCV耦合三目视觉的标准件目标定位研究与应用*
2015-11-03 07:17张亚荣裴志利
组合机床与自动化加工技术 2015年1期
张亚荣,裴志利
(1.通辽职业学院信息技术系,内蒙古通辽 028000;2.内蒙古民族大学计算机科学与技术学院,内蒙古通辽 028000)
OpenCV耦合三目视觉的标准件目标定位研究与应用*
张亚荣1,裴志利2
(1.通辽职业学院信息技术系,内蒙古通辽 028000;2.内蒙古民族大学计算机科学与技术学院,内蒙古通辽 028000)
在制造业自动化生产过程中,需要对标准件上某些目标进行定位,从而以此为依据对生产件进行校准。由于标准件为金属物品,且表面粗糙,打光成像后,目标背景复杂,而当前的图像目标定位算法不稳定。对此,文章提出了一个基于OpenCV与三目视觉的标准件定位机制。首先基于三个Basler工业相机实现图像采集;然后基于形态学处理与阈值分割处理得到目标的大致区域,再通过轮廓匹配得到目标的精确坐标,轮廓特征有周长、长宽比、长宽差。最后引入特征判断机制,实现不良检测。最后测试了该机制性能,结果表明:与普通的图像目标定位算法相比,在图像目标特征不明显,且背景复杂时,该机制具有更好的定位与检测效果,准确定位出图像目标的轮廓。
图像目标定位;标准件;三目视觉;轮廓匹配;特征判断;OpenCV
0 引言
随着工业、制造业自动化的蓬勃发展,机器人作业、机器视觉检测等技术在工业领域内得到广泛应用,已在很大程度上推动了制造业自动化的发展[1]。机器视觉检测在工业自动化领域的作用主要有:引导机器人机构做目标定位和抓取、对产品进行不良检测,对产品表面进行距离测量等等。其中的目标定位是视觉检测的基础,为了取得良好的目标定位效果,诸多学者进行了研究,并提出了许多不同的目标定位算法,主要包括基于静态大差异特征识别定位算法与基于聚类直方图的二次分类定位算法[2-4]。如赵大伟[5]等人通过提取图像区域特征建立一个搜索区间,增强区域特征寻优性能,消除特征小差异带来的定位干扰,实验结果表明其算法具有良好的视觉定位效果。李翀伦[6]等人提出了一种基于聚类直方图的二次分类方法,即通过将滑动模块间多维统计特征作为度量依据,将图像对比转化为对直方图间分类统计特征的比较,从而实现对缺乏明确轮廓的目标的快速位置估计。结果表明其算法具有更优异的定位性能,视觉效果好。
尽管上述这些定位机制能够取得较好的视觉效果;但是这些算法不稳定,当目标背景复杂时,这些算法就难以使用,定位质量较差,存在明显的定位偏差。
对此,本文提出了一个基于OpenCV与三目视觉的标准件定位机制。并测试了本文机制与传统定位算法的定位性能。
1 标准件目标的整体定位机制
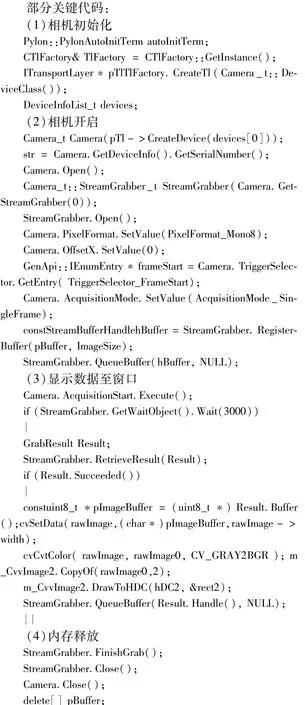
首先基于三个Basler工业相机实现图像采集,因为一块标准件上有3个目标需要定位,因此本文机制采用三个摄像头分别抓取三个目标所在视野,然后分别定位。本文选用的摄像头是工业相机,品牌型号为Basler acA2500-14gm/gc,标准件目标定位属于精细要求,故采用工业相机取高分辨率图像[7-8]。工业相机SDK函数往往庞大而复杂,打通相机与PC成为该项目第一个难点。首先研究Basler相机SDK底层函数,然后用C++进行调取,最终实现相机与PC数据通道,即实现相机取像功能、相机开启与关闭功能。
标准件目标是两个圆,一个矩形框,如图1所示。取像完成后,首先对采集的目标区域进行阈值分割得到包含目标区域二值图,再通过轮廓匹配得到目标的精确坐标,轮廓特征有面积、周长、长宽比、长宽差。最后引入特征判断机制,实现定位。以上算法采用C++平台联合OpenCV实现。本文机制整体框架如图2所示。

图1 标准件目标
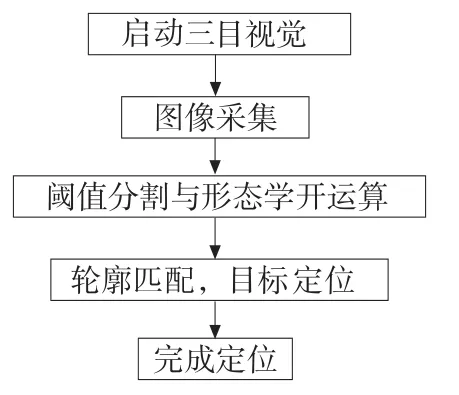
图2 本文定位机制架构
2 三目视觉采图机制
经过本文采用C++连通三个工业相机和PC,并控制摄像头的开启、取像、关闭。系统效率高,无内存泄露,功能完整,视野清晰,如图3所示。
采用OpenCV将相机采集的原始数据,即图像裸数据,转换为OpenCV可以处理的IplImage数据,为后续图像处理、定位打好数据基础。

图3 三目视觉效果图
3 基于OpenCV标准件目标定位
以三目视觉采集得到的标准件的左圆目标与矩形目标为测试对象,分别见图4与图7;再利用本文定位机制用阈值分割[9-10]与形态学开运算[11-12]处理图4与图7,得到目标区域二值图,如图5、图8所示;最后采用轮廓匹配,定位出目标,如图6、图9所示。从图中可知,轮廓匹配主要基于面积、周长、长轴短轴比、长轴短轴差。经过调试,可计算出经验值范围,从而判断是否为目标。
其中,L为周长;S[n]为目标轮廓边缘像素点组成的数组;CDB为目标轮廓长轴与短轴的比例;axis代表长轴;ayis代表短轴;CDC为目标轮廓长轴与短轴的差值。
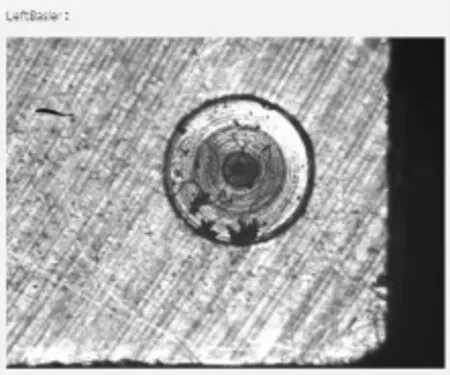
图4 原图
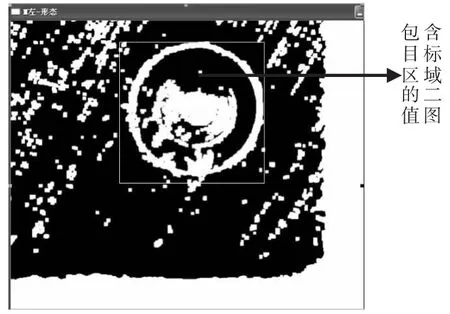
图5 阈值分割与形态学开运算处理效果图
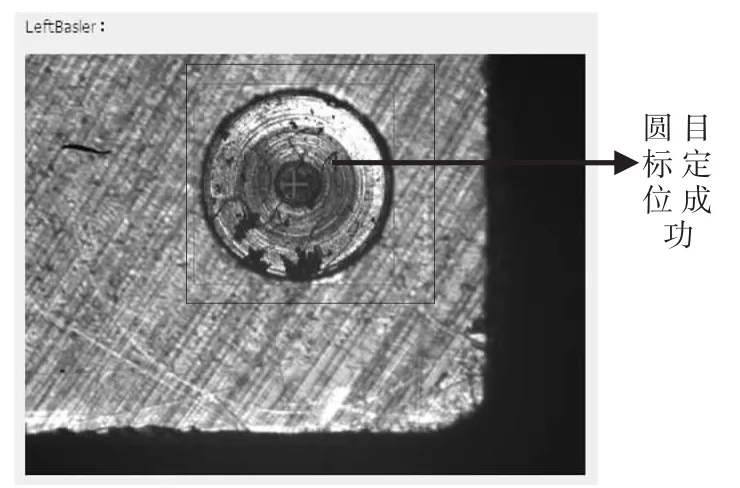
图6 圆目标定位效果
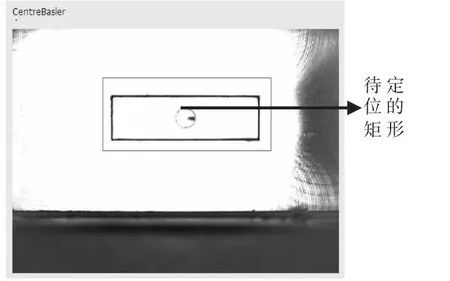
图7 原图

图8 阈值分割与形态学开运算处理效果图
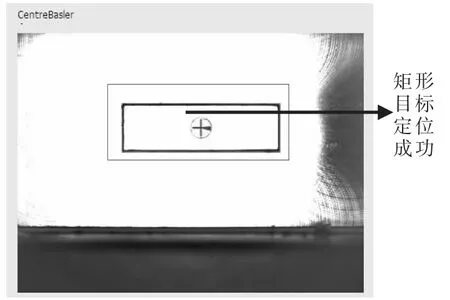
图9 矩形目标定位效果

4 实验与讨论
为了体现本文机制的优越性,将传统的图像目标定位机制视为对照组;并采用Intel3.5 GHz双核CPU,8GB内存,Windows Xp系统,根据相关程序,在Matlab平台上来测试这些机制性能。
本文定位机制通过三个工业相机,并基于C++、OpenCV编程完成对目标视野的取像,通过阈值分割、形态学处理、轮廓匹配得到目标的精确坐标。从图10中可知,在图像目标特征不明显,且背景复杂时,本文机制能够准确定位目标位置;而传统定位方式是基于静态大差异特征识别定位算法,在定位图像目标时,往往存在定位不准确,如图11、图12所示。

图10 本文标准件定位软件运行效果图
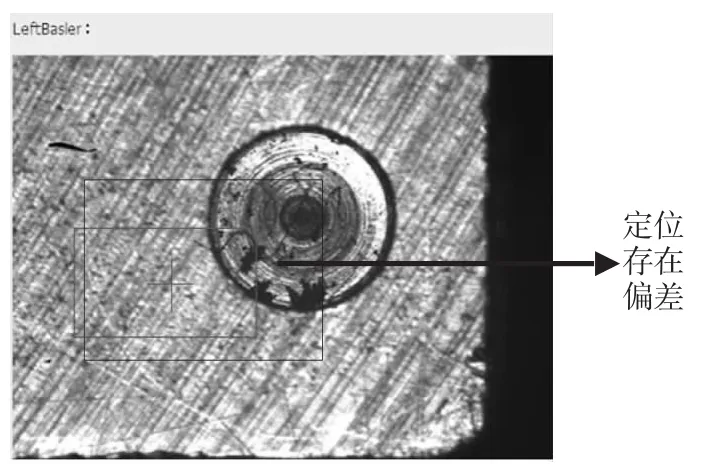
图11 传统定位效果图
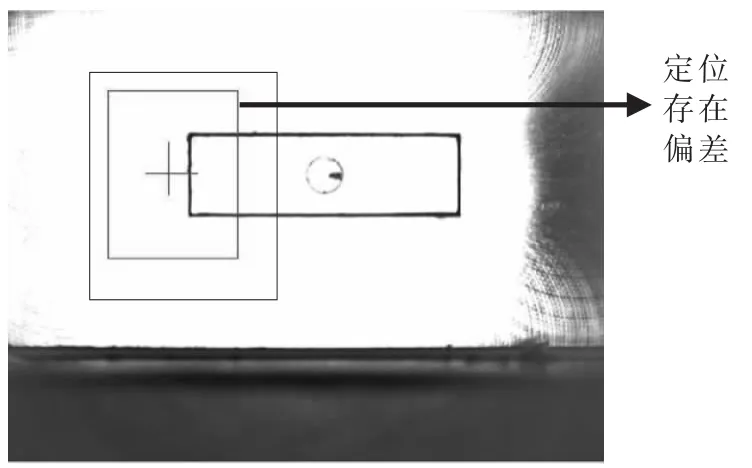
图12 传统定位效果图
5 结论
为了解决标准件目标定位问题,本文提出了一个基于OpenCV与三目视觉的标准件定位机制。首先基于三个Basler工业相机实现图像采集;然后基于形态学处理与阈值分割处理得到目标的大致区域,再通过轮廓匹配得到目标的精确坐标。最后引入特征判断机制,实现定位。最后测试了本文机制性能,结果表明:与普通的图像目标定位算法相比,在图像目标特征不明显,且背景复杂时,本文机制具有更好的定位与检测效果。
[1]潘武,张莉彦,徐俊成.基于机器视觉的工件的在线检测[J].组合机床与自动化加工技术,2012(7):75-78.
[2]祁晓玲,赵霞霞,靳伍银.基于机器视觉的轴类零件几何尺寸测量[J].组合机床与自动化加工技术,2013(1):65-67.
[3]陈伟华,马琼雄,陈月军.基于VisionPro的工业机器人视觉定位系统[J].组合机床与自动化加工技术,2012(2):81-83.
[4]周帆,江维,李树全,等.基于粒子滤波的移动物体定位和追踪算法[J].软件学报,2013,24(9):2196-2213.
[5]赵大伟,陈刚.机载不定视觉下的图像小目标定位算法仿真[J].计算机仿真,2013,30(10):108-111.
[6]李翀伦,杨露菁,刘忠.复杂背景下红外图像目标的快速定位[J].海军工程大学学报,2013,33(10):2886-2890.
[7]NooriH,Saryazdi S.A bilateral image inpainting[J].IJST Trans Electr Eng,2011,25(E2):95-108.
[8]SM Ali.Brain Tumor Extraction in MRI images using Clustering and Morphological Operations Techniques[J].International Journal of Geographic Information Application System and Remote Sensing,2013,4(1):11-24.
[9]RB Xu,Y Xie,X Guo.Natural Human-Computer Interaction Based on Finger Tracking[J].Applied Mechanics and Materials,2013,380(15):482-4387.
[10]贾天奇,张冲,郑姣.基于模糊距离的自适应阈值分割算法[J].计算机工程与设计,2014,35(3):857-860.
[11]E Varga,PMT Pattynama,A Freudenthal.Manipulation of mental models of anatomy in interventional radiology and its consequences for design of human-computer interaction[J].Cognition,Technology&Work,2013,15(4):457-473.
[12]R Su,C Sun,C Zhang.A new method for linear feature and junction enhancement in 2D images based on morphological operation,oriented anisotropic Gaussian function and Hessian information[J].Pattern Recognition,2014,47(10):3193-3208.
(编辑 李秀敏)(编辑 李秀敏)
The Location Research and Application on The Target of Standard Parts Based on OpenCV and Trinocular Vision
ZHANG Ya-rong1,PEI Zhi-li2
(1.Department of Information Technology,Tong Liao Vocation College,Tongliao Inner Monggolia 028000,China;2.College of Computer Science and Technology,Inner Monggolia University of the Nationalities,Tongliao Inner Monggolia 028000,China)
In the process of manufacture automation production,some target positioning on the standard parts was needed,and on this basis to produce a calibration.Because of the standard parts were made of metal objects,and the surface is rough,imaging after polishing,target with complex background.And the current image target localization algorithm is not stable,when the target is very small,which make characteristics not obvious,make poor quality of positioning.To solve this,this paper proposes a target-location of standard parts based on opencv and trinocular vision.First of all,based on three industrial camera to realize Image acquisition;Then based on threshold segmentation and morphological processing target area is acquired,target precise coordinates is obtained by contour matching again,contour features of area,perimeter,aspect ratio,width is poor.Characteristics determine mechanism is introduced,for detecting adverse. Finally tested in this paper,the mechanism of performance,the results show that,compared with ordinary image target localization algorithm in the image where the target is very small,which make characteristics not obvious,mechanism in this paper has better positioning effect,pinpoint the outline of the image target.
image orientation;standard parts;trinocular vision;contour matching;industrial camera;OpenCV
TH161;TG659
A
1001-2265(2015)01-0067-04 DOI:10.13462/j.cnki.mmtamt.2015.01.019
2014-10-19
国家自然科学基金资助项目(61163034);国家自然科学基金资助项目(61373067);内蒙古自然科学基金资助项目(2013MS0911);内蒙古民族大学科学研究项目(NMD1231);内蒙古自治区“草原英才工程”(2013);内蒙古自治区“青年科技领军人才”(NJYT-14-A09);内蒙古自治区“321人才工程”二层次人选(2010)
张亚荣(1974—),女,内蒙古通辽人,通辽职业学院讲师,硕士,研究方向为计算机辅助制造、图像处理,(E-mail)ZhangYarong1974@ 163.com;通讯作者:裴志利(1968—),男,内蒙古通辽人,内蒙古民族大学教授,博士,硕士生导师,研究方向为计算机图形技术、模式识别。
猜你喜欢
铁道货运(2022年10期)2022-10-27
机械工业标准化与质量(2022年4期)2022-08-12
内蒙古教育(2021年22期)2021-03-08
装备制造技术(2020年1期)2020-12-25
制造技术与机床(2019年11期)2019-12-04
科学与财富(2019年18期)2019-07-10
新西部下半月(2018年9期)2018-12-13
铁道通信信号(2018年3期)2018-04-19
中国交通信息化(2017年4期)2017-06-06
现代企业(2015年9期)2015-02-28
