
地铁设备限界自动成图系统的开发与应用
2015-10-31 00:49张云龙杨松林张成平
都市快轨交通 2015年1期
张云龙 杨松林 张成平 李 阳 师 海
(北京交通大学土木建筑工程学院 北京 100044)
地铁设备限界自动成图系统的开发与应用
张云龙杨松林张成平李阳师海
(北京交通大学土木建筑工程学院北京100044)
根据《地铁限界标准》中的地铁设备限界计算原理,对车辆限界、设备限界的算法进行简化改进,计算出车辆限界、设备限界坐标。以Microsoft Visual Basic 6.0为开发平台,实现直线段和曲线地段地铁设备限界自动计算、自动设计、CAD图的自动绘制,以提高设计效率。通过在北京地铁6号线西延工程初步设计中的应用,验证该算法的可行性和系统使用的灵活性。
地铁;车辆限界;设备限界;自动成图系统
1 发展概况
目前,大部分的国家和地区是根据国际铁路联盟UIC505标准来制定自己的地铁限界标准,UIC505标准是基于已确定的基准轮廓线来粗略计算的,需要计算后增加安全量。德国于1977年颁布了用于城市轨道交通的Bostrab限界标准,考虑了可能的全部误差,引入了一些动力参数,利用Bostrab标准不需要考虑增加安全量。所以,相对于UIC505标准,Bostrab标准更加精确,更适用于地铁限界的确定[1]。
随着计算机技术的迅速发展,目前国内针对地铁限界设计的CAD系统也取得了一定的发展,北京城建设计研究总院和上海铁道大学(现同济大学)合作开发了地铁限界设计、校核CAD 系统等。
地铁限界直接影响到地铁工程土建部分的投资规模,对地铁造价有重要影响,所以确定一个既能保证车辆运行安全又不增大隧道空间的经济、合理的断面尺寸,是地铁限界设计的任务和目的[2-3]。笔者针对北京地铁6号线西延工程,设计出了地铁设备限界的CAD自动成图系统,实现了自动计算、设计、成图的功能,并在工程中得到了应用,效果良好。
2 地铁车辆限界、设备限界的计算方法
车辆限界、设备限界的计算坐标是垂直于轨道中心线的二维平面坐标,横坐标轴X轴与设计轨顶平面相切,纵坐标轴Y轴过标称轨距平分点并垂直于轨顶平面,构成了基准坐标系[4]。
设备限界计算流程如图1所示。
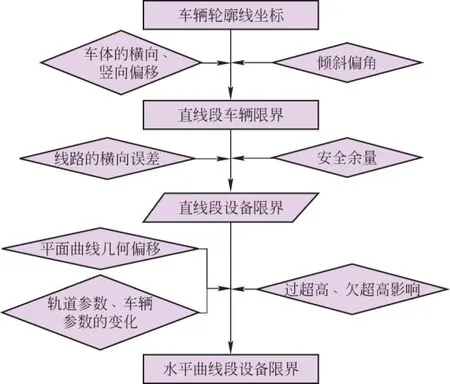
图1 设备限界的计算流程
2.1车辆限界计算
车辆限界的计算以列车在平顺直线上、整体道床的轨道上以额定速度运行为基本条件,分为高架线(或地面线)车辆限界和隧道内车辆限界两种类型,根据不同的外部条件选取参数,按照车体、转向架(构架、簧下部分、踏面、轮缘)、受电弓(受流器)三部分车体限界的偏移量进行计算[5-6]。
首先根据地铁线路运营选用的车型,确定车体轮廓线的控制点坐标;然后考虑各个计算要素(偏移量);最后是控制点坐标加上(减去)偏移量。根据这些动态偏移量,计算得到的最大动态包络线就是车辆限界[7]。由于CJJ 96—2003《地铁限界标准》规定的车辆限界计算公式过于复杂,不方便实际工程应用,所以在此规范基础上简化了计算公式,计算出了车辆接近限界,并利用设备限界的计算公式,得到了直线段设备接近限界。
2.1.1部分计算参数
车辆至轨顶面高度h,车辆最大宽度w,车体长度L,车体计算长度l,车辆定距(或称全轴距)a,转向架固定轴距a′,最小竖曲线半径r,中央弹簧计算挠度f,轴箱弹簧计算挠度f′。
2.1.2车体的偏移及倾斜
1) 车体的横向偏移量,其几何示意见图2。

图2 车体横向偏移几何示意
心盘中心总的偏移量k=b+c+d+e+g,端部横向偏移量m=(l/a)k,则车体的横向偏移量为
∑X=m+i
(1)
式中,b、c、d、e、g、i分别代表轮缘与轨头间隙、轮缘横向磨耗、轮对组装公差、摇枕横动量、上下心盘间隙、车辆横向制造误差。
2) 车体的垂直上下偏移量。


图3 车体竖向偏移几何示意

② 车体在竖曲线上的垂直偏移量。
端部偏移量为o={(L)2-[(a)2+(a′)2]}/8R,其中R是竖曲线的半径。
铅垂方向总偏移量(考虑端部)为
∑Y下=Y下+o
(2)
∑Y上=Y上+o
(3)
3) 车体在直线上运动时,由于以上因素产生倾斜角度α。旁承引起的倾斜度为α1,中央弹簧一侧下沉引起的偏斜角为α2,轴箱弹簧一侧下沉引起的偏斜角为α3,制造公差及车体运行后产生的倾斜角为α4,则总偏移倾斜角为α=α1+α2+α3+α4
2.1.3车辆接近限界

(4)

(5)
式中,h0为坐标原点至旋转中心的垂直距离,x、y为车体轮廓线坐标。计算坐标原点是线路中心与车体中心重合处。
为预留将来鼓形车的发展需要,一般考虑车体侧部车辆限界加宽50 mm。由于车体运动时会产生向左或向右侧滚,因此应对这两种工况分别计算,并取计算结果大者为最终车辆限界[8]。
2.2设备接近限界计算
设备接近限界的计算,是根据车辆接近限界的各点坐标和线路部分的计算参数而综合考虑的。
2.2.1线路部分计算参数

2.2.2直线段设备接近限界的计算公式
(6)
(7)
式中,X、Y为设备接近限界坐标,A为安全余量(根据《地铁限界标准》规定进行取值)。
上述计算公式适用于刚性道床。
2.2.3水平曲线地段设备限界的计算
水平曲线地段设备限界是在直线设备接近限界的基础上加宽加高的,曲线地段车辆限界或设备限界应按平面曲线几何偏移量、过超高或欠超高引起的限界加宽和加高量、曲线轨道参数及车辆参数变化引起的限界加宽量计算确定[9]。
曲线几何偏移、过超高或欠超高和曲线轨道参数及车辆参数变化引起设备限界的加宽和加高,其计算公式见参考文献[2]。
2.3车辆限界和设备限界偏移量总和
1) 车体横向加宽和过超高(或欠超高)偏移方向相同时,曲线外侧
ΔYa=Ta+ΔYQa+ΔYca
(8)
ΔZa=-ΔZQa
(9)
曲线内侧
ΔYi=Ti+ΔYQi+ΔYa
(10)
ΔZi=-ΔZQi
(11)
2) 车体横向加宽和过超高(或欠超高)偏移方向相反时曲线外侧
ΔYa=Ta-ΔYQa+ΔYca
(12)
ΔZa=ΔZQa
(13)
曲线内侧
ΔYi=Ti-ΔYQi+ΔYci
(14)
ΔZi=ΔZQi
(15)
式(8)~(15)中,ΔYa、ΔYi分别为曲 线 外、内 侧 设 备偏移量总和;Ta、Ti分别为曲线外、内侧车体横向加宽量,ΔYQa、ΔYQi分别为曲线外、内侧曲线几何偏移引起的车体横向加宽量,ΔYca、ΔYci分别为曲线外、内侧曲线轨道参数及车辆参数变化引起的车体及转向架车辆限界或设备限界加宽量,ΔZQa、ΔZQi分别为曲线外、内侧过超高或欠超高引起的设备限界竖向偏移量,ΔZa、ΔZi分别为曲线外、内侧设备限界的加高量。
3) 直线地段车辆限界或设备限界各点坐标值加上ΔYa(ΔYi)和ΔZa(ΔZi)值后,形成曲线地段设备限界。
3 地铁设备限界计算系统
地铁设备限界计算系统是在Microsoft Visual Basic 6.0平台开发而成的计算机辅助成图系统,具有自动计算A型、B1型、B2型车辆在不同的工况下设备的限界坐标、自动成图、绘制表格功能。根据用户需求,系统主要实现如图4所示的几个模块。

图4 地铁设备限界计算自动成图系统软件功能模块
3.1车辆类型信息选择模块
按照《地铁限界标准》规定的3种标准车型信息设计相应的SQL数据库表,地铁设备限界计算成图系统启动后,软件提示选择车辆类型信息,包括车辆类型、线路敷设方式、超高参数、旋转方式以及曲线半径参数输入。
3.2计算模块
计算模块包括直线段车辆限界坐标计算、直线段设备限界坐标计算和曲线段设备限界坐标计算;计算模块的数学模型是根据本文第2节确定的。
3.3CAD自动绘图模块[10]
本系统大部分运算工作就是通过各种算法计算各控制点的坐标。该模块负责将设计相关数据传递至AutoCAD中并完成绘图。为了保证设计结果的正确性,模块还设置了设计参数的检查功能。
3.4绘制表格模块
首先需要使用AddTable方法创建Mytable对象,然后采用AddText方法添加点号、坐标,就完成了表格的自动绘制及坐标的自动添加。
4 实例应用
北京地铁6号线西延工程设计范围为起点至一期工程起点的区段,全线约8.957 km,车辆采用与一期、二期工程一致的标准B2型车,区间最高运行速度100 km/h,车站最高速度55 km/h,允许瞬间超速5 km/h,正线区间均设置区间疏散平台。
软件使用是以北京地铁6号线西延工程直线段B2型车辆的地下线车辆轮廓线、车辆限界图以及设备限界图为例。
4.1程序计算流程
1) 选取工程对应的标准B2型车,该车辆的轮廓线坐标、车辆结构参数、轨道参数、动力学参数、变形和误差参数等已经内置于程序模块中,无需输入。
2) 输入运算参数,区间最高运行速度100 km/h,选取不旋转模式,线路敷设方式的隧道(地下线)以及接触网高度4 040 mm。
3) 输入最小曲线半径300 m,轨道超高120 mm,程序调动自动绘图、自动绘制表格模块,在CAD上生成北京地铁6号线西延工程标准B2型车地下线曲线段的设备限界图以及设备限界坐标表,如图5所示。

图5 北京地铁6号线西延工程B2车型地下曲线段设备限界图及内外侧坐标
4.2程序的可靠性验证
为了检验地铁设备限界自动成图系统的精度,利用程序计算A型高架线(或地面线)直线段车辆限界、设备限界坐标值(见表1、2),与《地铁限界标准》中在相同参数条件下的设备限界坐标进行对比分析。
由表1、2可以看出,通过地铁设备限界CAD自动成图系统计算所获得的高架线(地面线)A型车辆限界坐标、直线段设备限界坐标,可以发现系统计算的坐标值与《标准》中的坐标基本一致,所以说程序精度满足实际工程的要求。
5 结语
1) 在《地铁限界规范》基础上,对车辆限界算法进行了简化,并利用设备限界的计算公式,得到了直线段设备限界,新的算法和程序具有方便灵活性。
2) 地铁限界计算CAD成图系统在北京地铁6号线西延工程限界设计中得到了应用,提高了限界设计的效率,降低了设计成本,具有良好的实用性。
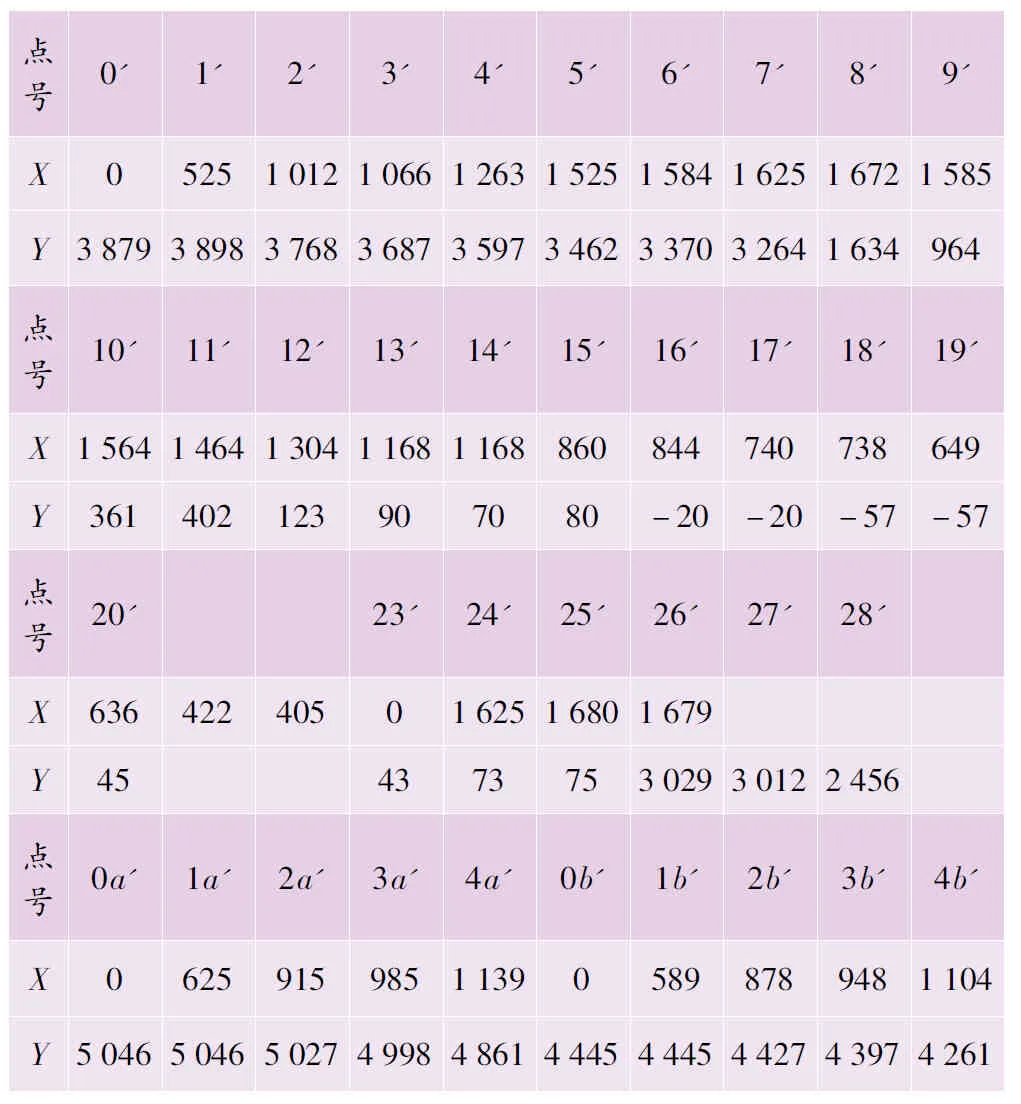
表1 程序计算的A型高架线(地面线)直线段车辆限界坐标
注:第0a′,1a′,2a′,3a′,4a′点为受电弓5 000 mm时的坐标值;0b′,1b′,2b′,3b′,4b′点为受电弓高度为4 400 mm时的坐标值。

表2 程序计算的A型高架线(地面线)直线段设备限界坐标
注:第0a′,1a′,2a′,3a′,4a′点为受电弓5 000 mm时的坐标值;0b′,1b′,2b′,3b′,4b′ 点为受电弓高度为4 400 mm时的坐标值。
[1] 吴俊泉.广州地铁1号线车辆和隧道设备限界的确定[J].规划与方案,2000(3):41-44.
[2] 孔令祥,梁青槐.地铁限界CAD系统设计及开发研究[J].都市快轨交通,2004,17(6):24-27.
[3] 施仲衡,张弥,王新杰,等.地下铁道设计与施工[M].陕西科学技术出版社,1997.
[4] 倪昌.曲线地段设备限界的计算原理[J].都市快轨交通,2004,17(4):24-26.
[5] CJJ 96—2003 地铁限界标准[S].北京:中国建筑工业出版社,2003:15.
[6] GB 50157—2003地铁设计规范[S].北京:中国计划出版社,2003:20.
[7] 万传风,魏庆朝,曾学贵,等.广州轨道交通三号线高速行驶条件下对安全限界的影响研究[J].中国安全科学学报,2003,13(2):40-42.
[8] 张斌,潘玲,朱剑月.城轨交通车辆限界和设备限界计算[J].现代城市轨道交通,2007(3):32-34.
[9] 骆礼伦,叶芹禄.城市轨道交通限界设计软件的开发与应用[J].城市轨道交通研究,2013(8):148-151.
[10] 陈良龙,孙守光,任尊松.地铁限界算法分析与软件实现[J].城市轨道车辆,2005,43(1):11-14.
(编辑:曹雪明)
Development and Application of Automatic Mapping System for Metro Equipment Gauges
Zhang YunlongYang SonglinZhang ChengpingLi YangShi Hai
(Civil Engineering School, Beijing JiaotongUniversity,Beijing 100044)
According to the calculation principle of metro equipment gauges inMetroGaugesStandard, an improvement has been made to simplify the calculation of kinematic envelope and equipment gauges for calculating the coordinates of these two parameters. Compiled by Microsoft Visual Basic 6.0, the program presented in this paper can help achieve automatic calculation design and CAD drawing of the metro equipment gauges in line and curve segment, and improves the design efficiency accordingly. This program has been applied in the preliminary design of western extension of Beijing Subway Line 6, which has verified the feasibility of this calculation and the flexibility of the system.
metro; kinematic envelope; equipment gauges; structure gauges; Automatic Mapping Syste
10.3969/j.issn.1672-6073.2015.01.013
2013-12-30
2014-12-17
张云龙,男,博士研究生,从事线路规划设计技术与理论、GPS监测系统集成开发及GPS数据处理模型的研究,13115311@bjtu.edu.cn
国家自然科学基金项目(51378002;51008015)
U231.12
A
1672-6073(2015)01-0053-05
杨松林,男,教授,博士生导师
猜你喜欢
地理空间信息(2022年3期)2022-04-01
自然资源遥感(2018年3期)2018-09-04
制造技术与机床(2017年7期)2018-01-19
湖南工业职业技术学院学报(2017年3期)2017-07-18
电力系统及其自动化学报(2016年5期)2016-12-01
焊接(2015年1期)2015-07-18
焊接(2015年1期)2015-07-18
铁路通信信号工程技术(2015年4期)2015-02-28
城市轨道交通研究(2015年5期)2015-02-27
铁道机车车辆(2012年4期)2012-11-27
