
面向编队控制的机器人随机障碍群环境建模方法
2015-10-30 07:20:48任立敏谭益松张海波
制造业自动化 2015年10期
任立敏,谭益松,张海波
(东北电力大学 机械工程学院,吉林 132012)
0 引言
若要实现编队控制,需要编队群体中的智能移动机器人个体首先能够通过一定的手段获取其在空间中的位置、方向,并能够对其工作空间内的环境信息进行足够的理解和描述。因而,环境感知问题是编队控制研究中基础而又重要的问题,这个问题的研究是编队控制技术的前提。环境感知是指机器人通过自身携带的传感器获取工作空间内的环境信息并建立环境模型的过程,有效而可靠的环境建模方法是机器人能够在未知环境下实现自主控制的关键。此外,机器人在工作空间内环境建模方法的实时性及定位的准确性直接影响着编队及导航的质量。
文献中有关环境建模的方法很多,包括栅格法、几何法、拓扑图法以及四叉树方法等[1]。其中,栅格法以其应用简单的特性备受研究者的青睐[2,3]。栅格法的基本思想将机器人周围的工作空间划分成一系列具有二值信息的网格单元,利用传感器探测障碍物的位置信息,并将其映射到相应的网格单元上。每个栅格具有一个置信值CV,该值由考虑了传感器特性的概率函数更新,用于描述在此方位中存在障碍物的可信度。网格中的CV值越高,表示存在障碍物的可能性越大。机器人在未知环境中的导航问题就可以转化为在这些大小不等的网格中寻找起始点到目标点的通路。此外,文献中也有应用径向扇形栅格表示法实现机器人的运动规划[4]。栅格法将环境量化为具有一定分辨率的栅格,并通过二维笛卡尔矩阵单元来描述机器人周围的工作空间,栅格的大小、形状及分辨率等因素直接影响着环境信息存储量及安全路径的搜索时间。由此可见,栅格法存在的问题是当感知区域较大时,为了获得机器人的运动行为需要消耗大量的内存资源及计算时间,因而不利于实时应用。
除上述环境建模方法,基于瞬时目标的方法也在实际中应用广泛[5~9],即在每个采样点都根据测距传感器信息建立一个瞬时目标点,机器人跟踪这一系列瞬时目标点实现定点导航。该方法要求机器人具有360°障碍检测范围而且可以区分遇到的障碍物边缘是属于新的障碍物还是已碰到过的障碍物。此外,还有一种是跟踪墙壁的方法[10,11],即控制机器人在移动过程中与墙面保持恒定距离,这种方法不要求机器人具有360°探测范围,但是这种方法不适用于障碍物边缘轮廓突变等复杂情况。洪伟等[12]利用超声波传感器基于栅格地图和滚动视窗的控制方法, 提出了一种提取机器人局部障碍物群环境特征的数据融合新方法,该方法在多个级别对原始数据进行不同程度的抽象和压缩,但由于超声波传感器本身的局限性,使该方法只在仿真环境下进行了验证。
对机器人工作空间内局部环境适当的描述是机器人执行运动控制行为的关键,但由于机器人只有有限的存储空间,只能用来存储有限的关键信息点。例如对于环境中任意形状的障碍物,如果以增量式地图的形式对环境进行建模,往往会引起存储空间的不足,难以满足实时性的需求。为此,本文用2-D激光测距仪来获取编队过程中领航机器人周围的环境信息,并提出一种面向编队控制的机器人随机障碍群环境建模方法来描述机器人周围的工作环境。该方法将机器人携带的传感器获得的数据信息以极坐标矢量图的形式存储,并将机器人工作空间内的环境建模为随机数量的障碍群,大大节省了环境信息的存储量,为多机器人实现合作编队和编队避障等关键技术奠定了基础
1 2-D激光测距仪的局部环境表示
1.1 2-D激光测距仪数据模型
本文选择激光测距仪作为机器人环境感知的传感器,安装在机器人前端,可以提供Ns个相等角度空间读数,其扫描数据模型如图1所示,虚线的圆表示传感器的最大可探测范围。
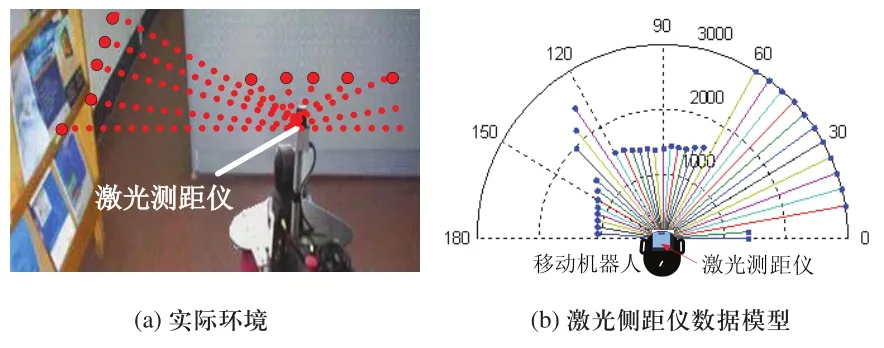
图1 2-D激光测距仪及其数据模型
由于激光传感器坐标系的形式为极坐标系统,Ns束激光读数是以逆时针方向进行标号,且第一束激光与机器人坐标系的XR轴相差90°,则2-D激光测距仪测得的第j个激光束方向上的位置点可以表示为:

其中,dj为第j束激光方向上测得的距离值,而jφ为激光束方向和Xs轴之间的方位角。由于对每个激光束而言,下标和光束角之间的关系是确定的,因此测得的位置点也可以方便地表示成如下形式:

1.2 基于2-D激光测距仪的局部环境表示
本文以激光测距仪的坐标原点为中心,在机器人运动的前方设置半径为Rd的半圆作为滚动窗口,当传感器探测的距离值dj>Rd时,则令dj=Rd。随着机器人的运动,滚动窗口也一同向前移动。在每个采样时刻,根据机器人当前的位置信息和传感器所获取的最新数据,对窗口内的环境及障碍物状况进行更新。同时,将滚动视窗内的区域以角度δ为步长划分为个矢量方向δ的选取原则是保证视窗边缘处的每一个栅格至少映射到一个矢量方向上,即,其中S为单个栅格对角线的长度,则视窗内的环境由如下的极坐标矢量来表示:


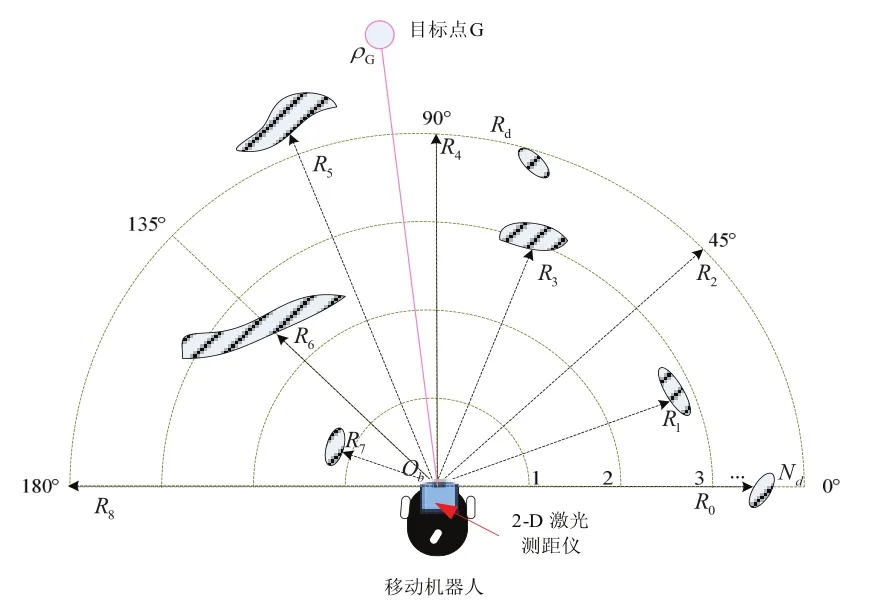
图2 极坐标矢量法描述局部环境
设Gρ表示机器人与目标点之间的距离,jG为与目标点方向角Gθ最接近的激光束的下标。当机器人滚动窗口内检测到障碍物时,返回机器人与障碍物之间的距离Rj,对于机器人导航而言,机器人并不关心目标点之后的障碍信息,基于此,用一种变更的局部环境向量来描述机器人周围的局部环境,的第j个元素表示如下:

这种新的局部环境描述方法称为极坐标矢量图法,该模型具有以下优点:1)该模型可以由测距传感器获得的测量信息直接建立;2)相比于栅格描述法及径向扇形栅格法,极坐标矢量法极大地节省了存储空间。极坐标矢量存储法描述环境信息本质上类似于传感器数据的分布,该方法适合于超声波、激光测距仪等测距传感器,便于机器人的环境感知及行为决策。为了满足实际的需要并考虑实时性,本文选择的HOKUYO URG-04LX激光测距仪的角度分辨率为0.36°,其扫描区域为240°,一共可以获得Ns=671束激光数据。为了便于直观描述,下面以Ns=9束激光为例,将极坐标矢量环境描述法与栅格法进行比较,如图1所示机器人携带激光测距仪感知的局部环境实例,则可以得到矢量,而径向扇形栅格图将需要用如式(6)所示的维矩阵来描述相同的局部空间,其中Nd为沿着距离方向上的栅格的维数。

其中,“0”和“1”值分别表示相应的单元格为自由空间或者被障碍物占据,“×”表示相应位置的单元格是不确定的。由此可见,采用本文提出的极坐标矢量法存储环境信息只需要个数为Ns的向量即可,而对于栅格表示法在相同元素大小的情况下则需要Ns×Nd的矩阵来描述同一环境,这表明本文提出的极坐标矢量法可以极大地节省机器人的内存空间,提高了机器人响应的实时性。
2 随机障碍群环境模型的建立
前面介绍的激光传感器扫描数据模型没有考虑测量的不确定性,然而这些不确定性对于机器人的安全导航是十分必要的。测距传感器的距离不确定性通常是距离的函数,文献[13]根据实际实验测量获得了激光传感器距离误差曲线:,测距误差由距离误差的方差来确定。最大的测距误差出现在测量距离Rd周围,用dRσ表示。当由激光传感器获得环境信息的极坐标矢量后,在滚动视窗内,如果距离值(考虑测距不确定性的距离阈值),则认为滚动窗口内的第j个矢量方向上存在障碍物,若不满足上述条件则该方向上不存在障碍物。这样,可以将极坐标矢量划分为如下的障碍点集合和非障碍点集合:

式中On为机器人周围工作空间内障碍物的数目。
机器人在运动过程中,其工作空间内朝向目标点的行进方向上有没有障碍物对机器人的行为决策至关重要。如果行进方向上存在障碍物,则机器人只关心最先遇到的障碍物,而不关心位于已探测障碍物后方的障碍信息。为了加快机器人障碍检测的处理速度,本文根据数据聚类的思想,在障碍物密集的环境中通过检测连续的两个物体之间的距离,将相邻的机器人无法通过的障碍物进行分群处理,最终将机器人工作的局部环境用随机数量的障碍物群来描述。
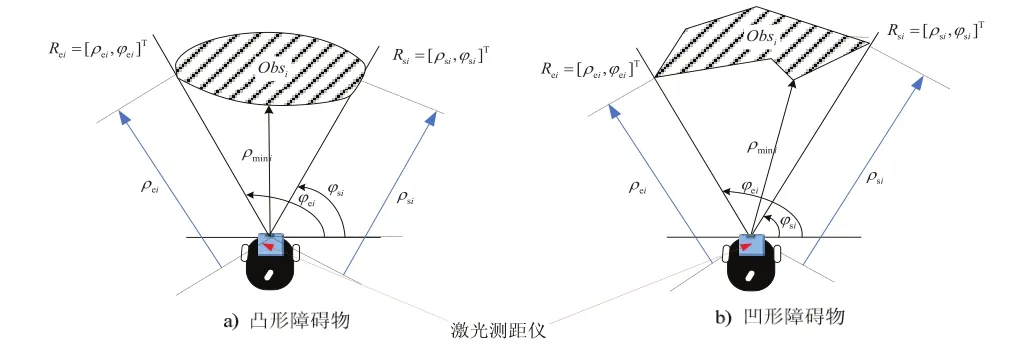
图3 障碍物轮廓模型
根据前面获得的障碍点的集合,当由激光传感器获得的极坐标矢量中连续不等于时,则有两种可能:1)这些来源于同一个障碍物;2)这些由两个或两个以上的障碍物前后重叠产生,如图4所示。
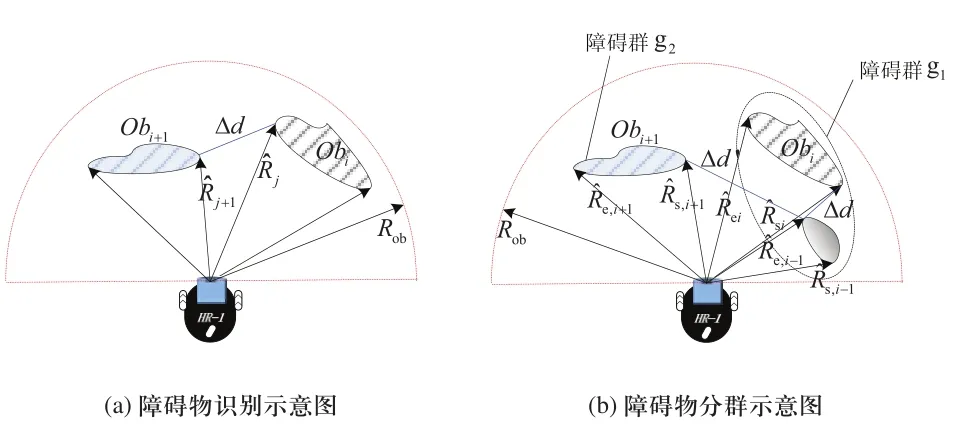
图4 环境中的障碍物识别与合并
对于图4所示的两种情况的辨别可以从j=0开始,通过对极坐标矢量图中的两个相邻矢量和之间的距离进行比较,如果小于预先设定的安全阈值Dth,即满足:



综上所述,利用2-D激光测距仪的原始扫描数据获得了机器人工作空间内所有的障碍物群,本文用这种随机数量的障碍物群来描述机器人工作空间内的局部环境,并利用下一时刻的激光扫描数据对当前环境地图进行更新。相比于栅格法,这种环境建模方法极大的节省了环境信息的存储量,为后续多移动机器人编队控制技术研究奠定了基础。
3 实验验证与结果分析
为了验证上述提出的基于随机障碍群的环境地图建立算法的有效性,本节将该算法应用于实际的移动机器人实验平台HR-I,该机器人上安装日本HOKUYO公司生产的URG-04LX 2D激光扫描测距仪作为主要的环境感知传感器。
环境感知实验是在实验室内进行,环境信息对于机器人来说不是全局已知的,需要利用传感器实时感知并建模。实际环境中的障碍物可以任意放置,图5(a)给出了实验中的两幅实际环境照片,实验环境中障碍物形状各异,具体包含了桌子、椅子,水桶等常用物品。实验环境B相对于环境A的主要变化是人为的将环境中的椅子向水桶方向移动,缩小了二者之间的距离,使之小于机器人本体的宽度,同时将桌子向水桶的方向移动。图5(b)给出了机器人平台上实际程序运行过程中实时得到的随机障碍群识别结果。
从上述结果可以看出:随着实际环境的变化,障碍物和障碍群的分布情况是不同的,并且最终获得了具体环境对应的障碍物及障碍群的个数,充分验证了本文所提出的环境建模方法的有效性和适用性。
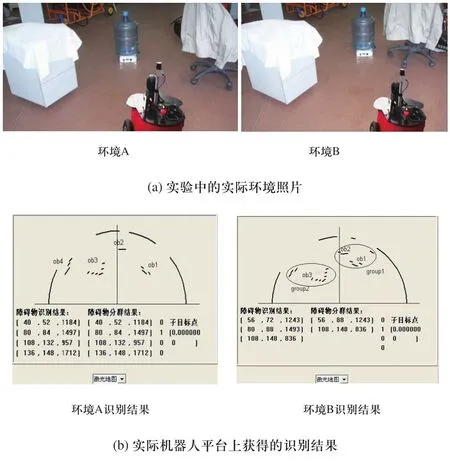
图5 实验环境及机器人平台程序运行结果
4 结论
本文针对编队控制研究中的基础而又重要的问题——环境感知问题开展了相关研究工作:基于2-D激光测距仪建立了随机障碍群环境模型,该模型将激光传感器获得的扫描数据以极坐标矢量图的形式存储,并将机器人工作空间内的环境建模为随机数量的障碍群,大大节省了环境信息的存储量。最后,将所提出的随机障碍群环境建模方法运用于移动机器人实验平台上,通过实际的两组不同的实验环境获得的实验结果,验证了本文所提出的环境建模方法的有效性.
[1] Hwang Y K, Ahuja N. Gross motion planning—a survey[J].ACM Computing Surveys (CSUR),1992,24(3):219-291.
[2] 袁曾任,高明.在动态环境中移动机器人导航和避碰的一种新方法[J].机器人,2000,22(2).
[3] Zhao-Qing M,Zengren Y.Real time navigation and obstacle avoidance based on grids method for fast mobile robot[J]. Robot,1996,18(6):344-348.
[4] Malkin P K,Addanki S. Lognets: A hybrid graph spatial representation for robot navigation[C].Proceedings of Eighth National Conference on Artif i cial Intelligence.1990,2:1045-1050.
[5] S. S. Ge, Y. J. Cui, and C.Zhang,“Instant-goal-driven methods for behavior-based mobile robot navigation,”in Proc.2003 IEEE Int.Symp Intelligent Control,Oct.2003:269-274.
[6] S. S. Ge,Lai Xuecheng and Abdullah Al Mamun,“Boudary following and globally convergent path planning using instant goals. IEEE Trans.on Systems.Man.and Cybernetics-Part B:Cybernetics,2005,35(2):240-254.
[7] F.G. Pin,S.R. Bender,Adding memory processing behavior to the fuzzy behaviorist approach: Resolving limit cycle problems in mobile robot navigation, Intelligent Automation and Soft Computing 1999,5(1).
[8] W.L. Xu, A virtual target approach for resolving the limit cycle problem in navigation of a fuzzy behavior-based mobile robot,Robotics and Autonomous Systems 2000,30(4):315-324.
[9] W.L. Xu, S.K. Tso, Sensor-based fuzzy reactive navigation for a mobile robot through local target switching, IEEE Transactions on SMC 1999,29(3):451-459.
[10] Toibero, J.M.; Carelli, R.;Kuchen, B.,“Stable switching contourfollowing controller for wheeled mobile robots,”Proceedings of IEEE International Conference on Robotics and Automation,2006:3724-3729.
[11] Juan Marcos Toibero, Flavio Roberti , Ricardo Carelli and Paolo Fiorini,“Switching control approach for stable navigation of mobile robots in unknown environments,”Robotics and Computer-Integrated Manufacturing,2011,27(3):558-568.
[12] 洪伟,田彦涛,董再励,等.智能机器人系统中局部环境特征的提取[J].机器人,2003,25(3):264-269.
[13] Castellanos J A,Tardos J D.Mobile robot localization and map building:A multisensor fusion approach[M].Kluwer academic publishers,2000.
猜你喜欢
科技创新与应用(2021年31期)2021-11-09 13:11:18
河北理科教学研究(2020年1期)2020-07-24 08:14:26
测控技术(2018年12期)2018-11-25 09:37:26
中学数学研究(广东)(2018年23期)2018-03-05 07:54:34
价值工程(2017年8期)2017-03-25 10:16:21
卷宗(2017年1期)2017-03-17 09:14:36
高中生·天天向上(2016年8期)2016-11-22 09:22:46
科技视界(2016年16期)2016-06-29 20:57:07
弹箭与制导学报(2015年1期)2015-03-11 15:32:23
雷达学报(2014年4期)2014-04-23 07:43:13
