
变电站带电作业水冲洗机器人的研制
2015-10-30 07:20鲁守银
制造业自动化 2015年10期
李 健,鲁守银,董 旭
(1.国网山东省电力公司电力科学研究院,济南 250002;2.山东鲁能智能技术有限公司,济南 250101;3.山东建筑大学,济南 250101)
0 引言
变电站绝缘子串裸露在户外环境时,需要定期的对表面的工业污秽和自然污秽进行清扫冲洗,以防止由于污秽的积累,在雨雾等恶劣天气发生污闪现象,造成停电等事故[1]。目前国内带电冲洗作业大都采用人工冲洗的方式,由人工手持冲洗杆,采用两枪或三枪跟踪冲洗方法进行水冲洗作业,这种冲洗方法对操作人员的技术要求很高,劳动强度大,工作效率低,存在一定的安全隐患。国外主要采用带电水冲洗的方法进行绝缘子的污秽冲洗,意大利Pisa University[2]通过用直升机安放带电水冲洗机器人的方法进行冲洗,这种冲洗方式的成本过高,无人机的工作受到天气状况的影响;美国的Florida Power & Light Co.采用变电站的固定水冲洗系统进行冲洗作业;日本的Kyushu电子电力公司和安川电子公司共同研制的带电作业机器人可以实现双臂清扫[3]。在国内的带电冲洗设备的研究从“气控绝缘子带电清扫及监测机具”开始,武汉高压研究所研究的500kV直流绝缘瓷瓶清洁机器人,超高压带电自动清扫机以及叉车装配超高压带电自动清扫机具等;上海交通大学机器人研究所研制HVCR-Ⅰ采用轻型卡车作为移动机构,通过剪叉式升降机构进行清扫作业,存在体积大,剪叉式升降机构稳定性差等问题[4];HVCR-Ⅱ在移动机构和升降机构方面进行优化设计,然而自动清扫速度慢,效率低的问题限制其使用范围。本文所述的变电站带电作业水冲洗机器人采用履带式移动底盘,伸缩臂式升降结构,体积小巧,能够在变电站内行动灵活行走,对变电站绝缘子等设备表面污秽进行带电水冲洗作业时稳定性高,能够减轻人工作业强度,提高操作安全性,冲洗效率高。
1 机器人总体设计
变电站带电作业水冲洗机器人主要由底盘移动机构,升降机构,液压系统,电控系统以及绝缘防护系统组成,如图1所示。底盘移动机构为履带式移动底盘结构,履带式底盘具有着地面积大,着地压强小,粘着力较强等优点,机器人可以适应变电站不同的路面条件,能够跨越沟道和电缆沟,自带动力可在变电站室外道路和设备区内无障碍运动;升降机构安装在底盘移动机构上,其末端为两自由度喷枪,升降机构能够将喷枪推举相应作业位置,喷枪作业平台具有自调平功能;液压系统采用全液压驱动与控制系统,可以在运行过程中实现大范围的无机调速,便于实现自动工作循环和自动过载保护;电控系统由电气系统和控制系统组成,电气系统主要负责向用电设备供电及蓄电池的充电,控制发电机的启动与停止,保持系统电压稳定,测量角度与位移进行数据的传输,从而实现运动学算法运动;控制系统包括车载子系统和遥控子系统,车载子系统和遥控子系统都具备整个系统的状态显示和控制指令的实现等功能,车载子系统和遥控子系统可以通过无线方式通信;绝缘防护系统采取绝缘臂与高电阻率水柱长度结合的组合绝缘模式,实现机器人在带电作业时的整体绝缘。

图1 变电站带电作业水冲洗机器人总体设计
变电站带电作业水冲洗机器人的主要参数:
1)整机质量:2000kg
2)机器人平台装载质量:120kg
3)机器人作业平台高度:7m
4)整机作业幅度:3.5m
5)行走速度:5km/h
6)回转平台速度:8rpm
7)最小转弯半径:750mm
8)臂架最大角度:65°
9)爬坡度:30°
1 0)整机收起外廓状态 (长×宽×高):3020×1300×1500mm
11)柴油发动机额定功率:25kW
12)发动机排量:2.19L
13)发动排额定转速:2200RPM
14)水枪出水压力:0~3Mpa
1.1 底盘移动结构设计
机器人的底盘移动机构采用履带式移动底盘结构,主要由柴油发动机,齿轮泵,履带架底盘,行走马达,驱动轮,支撑轮,从动轮,履带,张紧缓冲装置以及两侧的四个液压支腿组成。柴油箱位于底盘左侧,液压油箱位于底盘右侧,液压支腿铰接在底盘四周。传动机构采用IKY履带(车轮)用液压传动装置,由具有制动功能的阀组、液压马达、制动器、一级行星减速器组成,其输出可直接与驱动轮连接。机器人行走过程中,支腿收起位于两侧,在冲洗作业时,支腿张开,提高机器人的稳定性。
1.2 升降机构设计
升降机构主要由回转平台,两级伸缩臂,调平机构以及水枪喷嘴结构组成。回转平台与底盘移动机构通过回转支承连接,回转马达提供动力,实现回转平台及其附属件的连续旋转,比例控制箱螺栓连接于回转平台后端;两级伸缩臂与回转平台铰接,包括大臂、连接臂和前臂,大臂与连接臂采用槽型对扣结构,前臂两端加框架接头,伸缩臂之间的有移动滑块,便于臂的伸出与缩回,大臂与变幅油缸铰接,连接臂头端安装链轮,保证伸缩臂在伸出和缩回时的同步性,前臂采用高强度玻璃钢材质,达到绝缘的要求;调平机构采取静液压调平模式,主体有两个结构尺寸完全相同的调平液压缸组成,调平液压缸Ⅰ位于回转平台与大臂之间,调平液压缸Ⅱ安装在前臂与工作台之间的,其结构示意图如图2所示。两个调平油缸的有杆腔相连,无杆腔相连,使得当调平液压缸Ⅰ长度发生变化时,与工作平台相连的调平液压缸Ⅱ长度发生相反方向的变化。在系统中安装补油装置,以防止密封和接头处的泄漏影响到调平机构的调平特性。
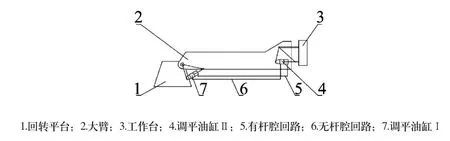
图2 调平机构结构示意图
水枪喷射机构包括水枪,跟踪摄像机,俯仰油缸和摆动油缸等。摆动油缸与工作台连接,俯仰油缸连接在摆动油缸上,从而实现摆动与俯仰的冲洗动作;水枪安装于水枪架上,进行冲洗作业,在机器人的水枪架上安装跟踪摄像机,以便于观察水冲洗作业情况,接受反馈信息,进行实时控制。水枪喷射机构示意图如图3所示。

图3 水枪喷射机构
1.3 液压系统设计
液压系统采用全液压驱动与控制,以适用于水冲洗机器人在变电站内进行冲洗作业的特殊工况。液压系统主要由液压马达,支腿油缸,变幅油缸,伸缩油缸,俯仰油缸,摆动油缸,绝缘油管以及电磁阀组成,根据液压泵的技术参数选择丹弗斯PVG32比例阀,采用模块化结构,可以根据作业需求组成液压阀组,柴油发动机
【68】 第37卷 第5期 2015-05(下)为整机提供动力源,发动机动力输出连接通过联轴器连接变量柱塞泵。液压油从油箱,经吸油滤油器进入机械臂液压控制油路,再经回油滤油器流回油箱。安全保护模块主要由单向阀与溢流阀构成,单向阀为控制油液回流,安全阀其过载保护功能,压力表通过压力表开关与油路相连,并实时显示油路液压油压力。下部电磁换向阀A组主要控制机器人前、后两侧支腿伸缩运动和工作机移动平台行走运动,通过中央回转接头、分配阀与液压泵连接;上装电磁换向阀B组主要控制回转平台、大臂、连接臂、俯仰油缸和摆动油缸,经上装控制切换按钮、分配阀与液压泵连接;中央回转接头是联接回转平台与底盘油路的液压元件,它保证回转平台旋转任意角度后,行走马达还能正常配油。液压控制原理图如图4所示。

图4 液压控制原理图
1.4 电控系统设计
变电站带电水冲洗机器人电控系统由电气系统和控制系统组成。
电气系统包括发电机、蓄电池、机械臂传感器系统、电源管理模块、通信系统。发电机在正常运转时,向所有用电设备供电,同时向蓄电池充电。蓄电池包括动力和控制电池和机械臂传感器电池。动力和控制电池负责给液压电磁阀、比例阀、车载子系统等供电。机械臂传感器电池负责给机械臂角度传感器、位移传感器、通信模块等供电。机械臂传感器负责采集机械臂各关节的角度和位移信息。电源管理模块负责电源的稳压、保护、充电、报警等。电气系统结构如图5所示。
变电站带电作业水冲洗机器人控制硬件系统包括:工控机、遥控手柄、触摸屏、按键、无线CLIENT、无线AP、串口服务器、TRIO控制器、角度传感器、摄像机和HUB等组成。其系统连接图如下图所示。该系统通过控制液压比例阀的开度,实现大臂旋转、大臂俯仰、小臂伸缩、平台俯仰、平台旋转及移动车体的移动精确控制,并通过在机械臂各关节处安装的角度及位移传感器,实现水冲洗机器人运动信息的实时监控。系统硬件组成如图6所示。
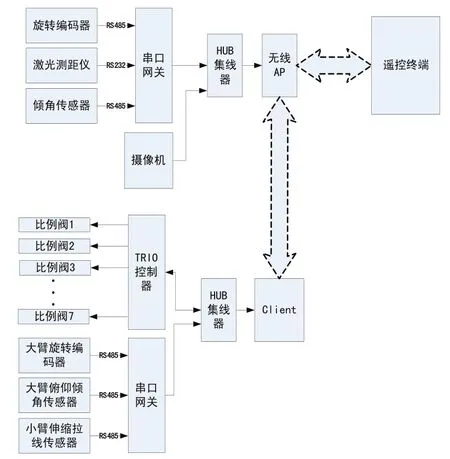
图5 电气系统结构图

图6 系统硬件组成
1.5 绝缘防护系统设计
绝缘防护系统由机器人本体的绝缘臂和高电阻率水柱相结合的组合绝缘措施。机器人本体伸缩臂中的前臂采用高强度玻璃钢材质,既满足强度要求,又达到绝缘的要求;带电水冲洗的水经过净化处理,净化后的水电阻率不低于100kkΩ·.cm。每次冲洗前都应用合格的电导率仪测量水电阻率,测量时应从水枪出口处取水样进行测量。根据中华人民共和国国家标准《GB/T 18037—2000带电作业工具基本技术要求与设计导则》探讨,在不同天气、湿度等因素下,不同电压等级所对应的间隙,确定喷嘴离带电设备的距离。
变电站水冲洗机器人绝缘性能参数:
1)整机绝缘等级:220kV绝缘。
2)变电设备带电水冲洗的水电阻率不小于100kkΩ·.cm。
3)水冲洗车体电气系统和喷枪须采用设有等电位连接线并接地,接地电阻小于1kΩ·。
2 机器人样机研制与试验
根据以上方案设计,研制出变电站带电作业水冲洗机器人的试验样机,如图7所示。

图7 变电站带电作业水冲洗机器人的试验样机
由于机器人的绝缘防护系统采取的是绝缘臂与高电阻率水柱相结合的组合绝缘方式,因此在冲洗之前对纯水制备系统进行了水压、水阻率、制水速度和最大流量进行了检测,测试结果如表1所示。
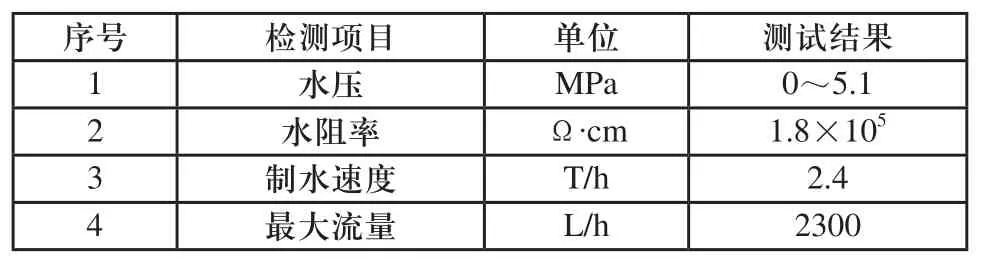
表1 纯水制备系统的测试结果
针对变电站带电作业水冲洗机器人机械性能、控制系统可靠性及冲洗效果等,进行了现场试验。冲洗作业时,移动底盘结构的液压支腿支撑地面以提高机器人的整体稳定性,回转平台旋转指定角度,伸缩臂伸出至安全距离,在远程控制的情况下采用双枪对冲,一冲四回的冲洗作业方式进行冲洗作业,现场试验如图8所示。
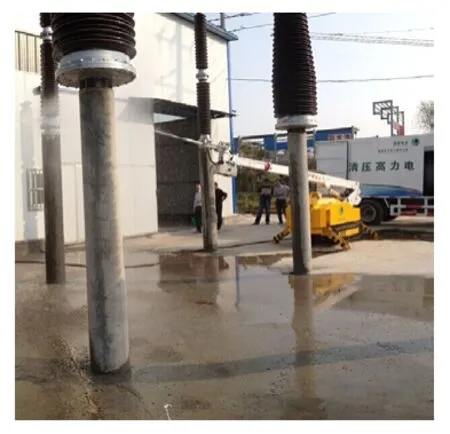
图8 变电站带电作业水冲洗机器人现场试验
为了防止冲洗时溅射的水雾沾湿相邻的绝缘子,从而发生闪络现象,需对冲洗角度进行控制。冲洗角度α为水柱与所冲洗的绝缘子和相近的绝缘子的连线之间的锐角,如图9所示。根据现场试验结果,当冲洗角度为45°时,相近的绝缘子会被溅湿,因此冲洗角度α应小于45°。

图9 冲洗角度
根据现场试验变电站带电作业水冲洗机器人机械性能与控制系统可靠性良好,机器人能够在远程控制的情况下到达指定位置,并进行冲洗作业。变电站带电作业水冲洗机器人冲洗作业后,绝缘支柱上流下的水为清水,无污垢及污水滴落,且绝缘子片表面光洁明亮,依据国家标准GB/T 13395-2008《电力设备带电水冲洗导则》,机器人冲洗后的效果满足变电站设备冲洗干净的判定要求,冲洗效果图如图10所示。

图10 冲洗后效果
3 结论
根据变电站作业环境,设计一种新型的变电站带电作业水冲洗机器人。该机器人采用履带式移动平台及绝缘升降机构,可在变电站室外道路和设备区无障碍自由运动,采用高水阻率和喷射距离的智能喷水系统,在不同天气、湿度等因素下,结合喷射水柱长度对泄漏电流的影响,确定喷嘴离带电设备的最佳喷射距离。融合实时在线检测,无线通讯技术与基于无线传感器网络的角度监测系统,利用加速度传感器、陀螺仪和地磁的传感器实时监测,实现对动态角度的无线精确监测。在保证带电冲洗作业的同时,极大的保障了技术人员的安全,减少了停电作业的损失,为变电站带电冲洗作业提供了一种新的解决方案。
[1] 车 立新 ,杨 汝清,顾毅.22 0- 3 3 0 K V 变 电 设 备 高 压 带 电 清 扫 机 器 人设 计[J].机器人,2005,27(2):102-107.
[2] Pelacchi P.Automatic hot line insulator washing device positioned by helicopter[C].Proceedings of IEEE 8th International Conference on Transmission & distribution Construction, Operation & Liveline Maintenance. Piscataway, NJ, USA:IEEE,1998:133-143.
[3] Nakashima M,Yakabe H,Maruyama Y. Application of semiautomatic robot technology on hot-line maintennance work[C].IEEE International Conference on Robotics and Automation.Nagoya,Japan:1995:843-850.
[4] 顾毅,翁新华,等.关节式超高压带电清扫机器人HVCR-Ⅱ[J].上海交通大学学报,2006,40(12):2173-2176,2181.
[5] 孔祚.超高压带电清扫机器人控制系统设计与研究[D].上海:上海交通大学,2008.
[6] 房光辉.高压带电清扫机器人移动载体的研究[D].上海:上海交通大学,2008.
[7] 李向东,鲁守银,等.一种基于变电站使用的移动机器人介绍[J].山东电力技术,2005,(03):3-6,10.
[8] 汤君茂.带电清扫机器人液压自动调平系统的设计与研究[D].上海:上海交通大学,2009.
[9] 杨汝清,顾毅,等.关节式带电清扫机器人的绝缘性及安全性设计[J].机器人,2006,28(02):149-153.
[10] 车立新,杨汝清,顾毅,等.带电清扫机器人绝缘安全分析[J].上海交通大学学报,2005,39(12):2011-2015.
[11] 胡 元 .高 空 作 业 车 工 作 平 台 调 平 机 构 [J].工 程 机 械 ,2006,37(12):34-36.
猜你喜欢
消费电子(2022年6期)2022-08-25
科技研究(2021年22期)2021-09-22
农业工程学报(2018年14期)2018-08-10
专用汽车(2018年7期)2018-07-24
通信电源技术(2018年10期)2018-01-25
航天工业管理(2017年4期)2017-05-12
大陆桥视野(2016年22期)2016-12-28
中国新技术新产品(2016年21期)2016-12-08
中国设备工程(2015年2期)2015-12-27
制造业自动化(2015年1期)2015-07-07
