增程式电动汽车增程器转速切换/功率跟随协调控制
2015-10-29 03:01申永鹏王耀南孟步敏易迪华
中国机械工程 2015年12期
申永鹏 王耀南 孟步敏 易迪华
1.湖南大学,长沙,410082 2.北汽新能源汽车有限公司,北京,102606
增程式电动汽车增程器转速切换/功率跟随协调控制
申永鹏1王耀南1孟步敏1易迪华2
1.湖南大学,长沙,4100822.北汽新能源汽车有限公司,北京,102606
针对电动汽车增程器系统中的发动机、发电机协调控制问题,提出了一种转速切换/功率跟随增程器协调控制策略。首先根据发动机的最佳制动燃油消耗率曲线设计了发动机的功率-转速切换表。然后,分别设计了基于发动机平均值模型的发动机转速二阶滑模控制系统和基于电压定向直接功率控制的PWM整流器功率控制系统。通过对发动机转速和PWM整流器输出功率的闭环控制,使发动机沿着最佳制动燃油消耗率曲线运行。最后,在AVL Cruise和MATLAB/Simulink仿真环境下搭建了系统的联合仿真模型,仿真结果从增程器功率跟随效果,发动机转速控制效果,动力电池电压、电流和SOC波动范围以及发动机工作点分布等方面验证了该策略的有效性。
增程式电动汽车; 增程器; 协调控制; 二阶滑模控制;直接功率控制
0 引言
作为一种不依赖于化石燃料、零排放的清洁能源车辆,纯电动汽车得到了人们越来越多的关注,但是当前的电能存储技术不足以为纯电动汽车提供一种功率/能量密度高、充电速度快并且价格相对低廉的电能存储装置,这极大地限制了纯电动汽车的大规模商业化推广。为了解决这种矛盾,增程式电动汽车(range extender electric vehicle, REEV)应运而生。
在纯电动汽车的基础上,加装能够为动力电池充电的辅助动力装置——增程器(auxiliary power unit,APU),便构成了一台增程式电动汽车。当动力电池能量充足时,汽车以纯电动模式行驶;当动力电池能量不足时,便启动增程器为动力电池充电或直接驱动车辆行驶,提高车辆的续驶里程。由于既能满足人们日常的短距离零排放清洁行驶,又能免除人们长距离行驶对车辆续驶里程的担忧,增程式电动汽车逐渐成为各整车厂、研究机构的关注热点[1-5]。
针对增程器工作在功率跟随状态时的发动机、发电机协调控制问题,结合发动机/电机转速和功率的耦合特性,本文首先设计了转速切换/功率跟随增程器协调控制策略,并根据发动机的最佳制动燃油消耗率曲线(brake specific fuel consumption,BSFC)设计了发动机的功率-转速切换表,然后分别设计了基于二阶滑模控制器的发动机转速控制器和基于电压定向直接功率控制(voltage-based direct power control,V-DPC)的PWM整流器功率控制器,最后在AVL Cruise和MATLAB/Simulink仿真环境下搭建了系统的联合仿真模型。
1 增程器控制基本原理
典型的增程式电动汽车动力系统结构如图1所示,车载充电器、小容量动力电池、驱动电机和驱动电机控制器构成了车辆动力系统的基本组件。车辆的加速性能、爬坡能力和最高车速完全取决于驱动电机和驱动电机控制器的特性。增程器由发动机、发电机和PWM整流器构成, 发动机和发电机同轴连接。当动力电池的荷电状态(state of charge,SOC)低于某一设定限值SOCmin时,整车控制器根据车速以及其他车辆信息启动增程器并向APU控制单元发出功率指令Pdemand。APU控制器根据功率需求指令和增程器控制策略调整发动机转速以及PWM整流器的输出功率,为车辆提供额外的电能。
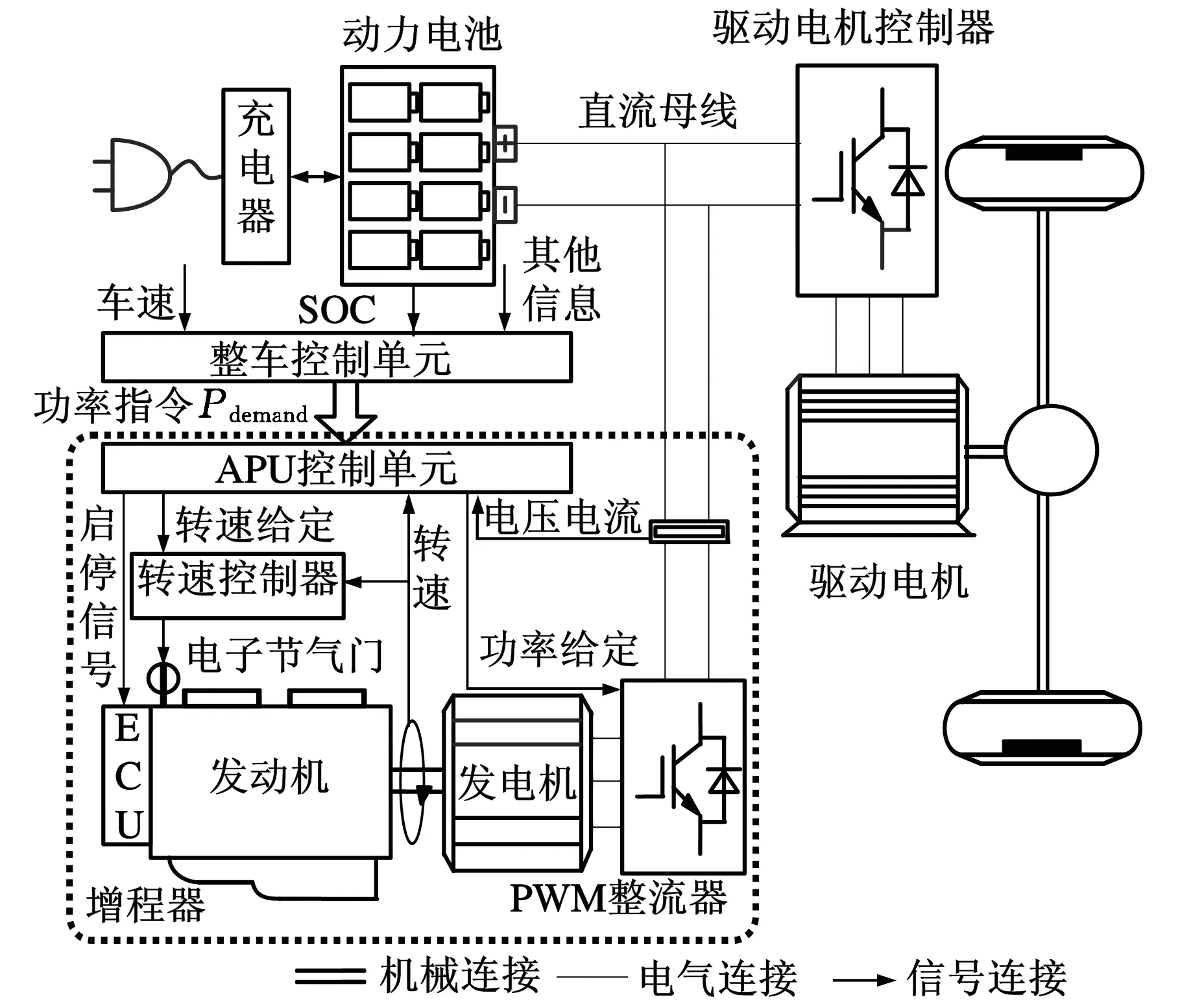
图1 增程式电动汽车动力系统结构示意图
由于APU的输出和整车直流母线直接相连,发动机与车辆的驱动轮不存在机械连接,发动机的转速和转矩与整车对车速和牵引转矩的需求无关,因此,增程器控制策略可以通过控制发动机在其转速-转矩/功率平面上的工作区间来实现对增程器的优化[6]。
一般而言,增程器控制策略应满足以下要求:
(1)输出功率满足整车的功率需求,不至于在行驶过程中造成动力电池的SOC持续下降。
(2)能够保持直流母线电压的基本稳定,不至于对动力电池造成大电流的充放电,从而降低动力电池使用寿命。
(3)能够保证增程器同时工作在发动机、发电机的高效区域,从而提高燃油效率,降低排放。
为解决增程器控制问题,文献[7]以发电功率需求为输入,采用模糊控制器确定具有最高燃油经济性的发动机转速和转矩,实现了对APU的高效工作点控制;文献[8]提出了一种基于线性变参数鲁棒控制器的APU控制方法,实现了对由柴油发动机和三相不控整流器组成的APU输出电压的稳定控制,有效抑制了负载突变对发动机转速和发电电流的影响;文献[9]以等效燃油消耗为优化目标,实现了发动机与电池间的功率均衡控制,提高了整车的燃油经济性。文献[10]以产生给定能量燃油效率最高为优化性能指标,构造了APU燃油效率最优控制模型,并采用最大值原理,实时计算发动机的最佳转速和转矩。上述方法,从整车控制策略或发动机、发电机控制方面入手,不同程度地提高了APU的燃油经济性,但是都没有涉及发动机、发电机的协调控制。
2 转速切换/功率跟随增程器控制
2.1转速切换/功率跟随控制策略
如前所述,优化发动机的工作区域,提高发动机燃油效率,降低排放是增程器控制策略的一个重要目标。由于车辆运行期间整车的功率需求波动范围很大,故增程器控制策略必须针对不同的功率需求及时调整发动机的转速,理想的发动机功率-转速曲线为图2所示的发动机最佳BSFC曲线。车辆运行期间,整车的功率需求变化较快,发动机的转速响应难以及时跟随功率的变化,并且频繁的发动机转速调整会影响发动机的空燃比控制,进而影响发动机的油耗和排放[11]。
为解决这一问题,在发动机的功率输出范围[Pmin,Pmax]内,划分出k个子区间,将每个功率子区间的中点Pi对应的发动机转速ni作为该区间的发动机目标转速,如图2所示,根据该图可以得出发动机的功率-转速切换表,增程器根据功率指令所在的功率区间,决定发动机的目标转速。同时,采用基于电压定向直接功率控制方法对PWM整流器进行功率闭环控制,实现增程器输出功率对整车功率需求的跟随。此时发动机的输出转矩可描述为
(1)
式中,PAPU为APU的输出功率;n为发动机转速。
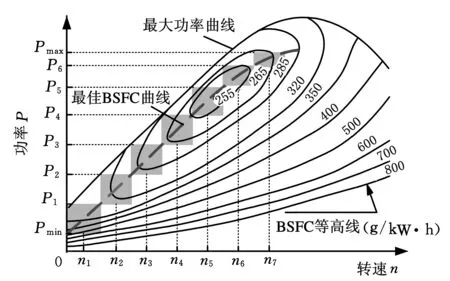
图2 发动机最佳BSFC曲线及功率-转速切换图
综合考虑发动机的转速调节误差和PWM整流器的功率调节误差,发动机的实际工作区间将是一条围绕最佳BSFC曲线的狭长区域。
转速切换/功率跟随增程器协调控制系统结构如图3所示,其中,Eabc、Iabc分别为发电机的相电压和相电流瞬时矢量;sa、sb和sc为PWM整流器功率开关管的开关状态。控制系统根据整车的实时功率需求Pdemand查找功率-转速切换表对应的目标转速n*,发动机转速控制器根据该目标转速通过调节电子节气门开度θ,实现对发动机转速的闭环控制。同时,采用基于电压定向的直接功率控制方法对PWM整流器的输出功率进行闭环控制,从而实现对整车的功率需求的跟踪。发动机转速控制器和PWM整流器功率控制器之间没有耦合关系,从而实现了发动机转速控制和发电机、PWM整流器发电系统的解耦控制。实质上,由于在特定的功率子区间内发动机转速是恒定的,所以PWM整流器在功率子区间内的功率调节是通过对发电机的发电转矩的调整而实现的,同时由于发动机和发电机是同轴连接的,所以发动机的负载转矩也是随功率变化而调整的。
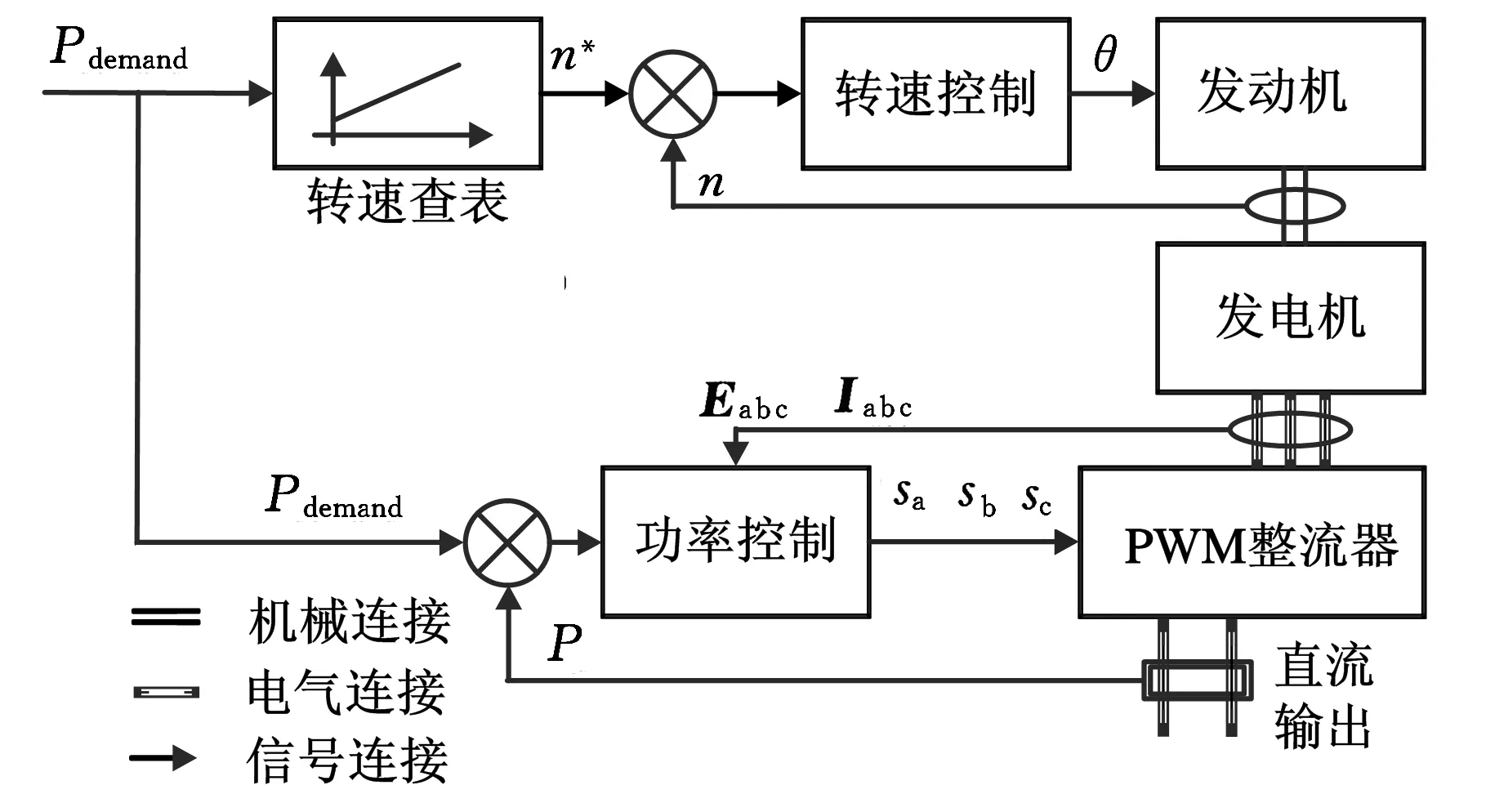
图3 转速切换/功率跟随APU协调控制系统
当整车的功率需求在两个不同的功率区间之间小幅度频繁波动时,会造成发动机转速的频繁调节,这种转速的频繁调节会严重影响发动机的工作效率和排放性能[11],为了避免这种情况的发生,引入功率迟滞环节,迟滞宽度为ΔP,只有当功率需求上升到Pm+ΔP/2时,转速才会从nm切换到nm+1。同理,只有当功率下降到Pm-ΔP/2时,转速才会从nm+1切换到nm。功率迟滞环节示意图如图4所示。
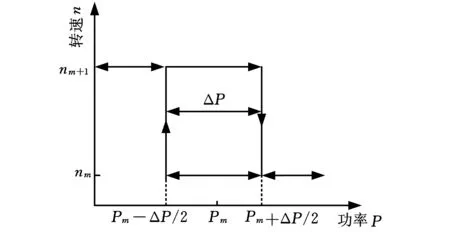
图4 功率迟滞环节
2.2基于二阶滑模的发动机转速控制系统设计
实现对发动机转速的精确控制是转速切换/功率跟随增程器协调控制系统的重要环节。汽油发动机转速控制系统是一个典型的非线性、强耦合、时变动力学系统[12],其系统参数往往随着外部环境以及工况的变化在较大的范围内波动。发动机转速控制器不仅要能保证对目标转速的快速、稳定跟随,还要对模型误差、负载突变具有较强的鲁棒性。
滑模变结构控制本质上是一种非线性控制,在控制过程中,它根据系统的状态,动态地对系统结构进行调整,使系统按照预定“滑动模态”的状态轨迹运动。由于滑动模态与系统参数及负载扰动无关,这就使得滑模变结构控制具有鲁棒性较强、无需在线系统辨识等优点[13-14],但是传统的滑模变结构控制本质上的不连续开关特性会引起系统的抖振,抖振不仅影响系统的控制精度,也会激发系统的高频未建模动态特性。同时,这种高频切换输出直接作用在执行器上,不仅对执行器的响应速度提出了很高的要求,甚至会损坏执行器。二阶滑模控制将不连续的控制量作用在滑模量的二阶微分上而不是一阶微分上,实现了控制输出的连续,有效地改善了抖振现象[15-16],同时保留了传统滑模控制的鲁棒性强、有限时间收敛等优点,特别适合发动机转速控制这类非线性、参数不确定系统。
综合汽油发动机的进气系统、转矩产生系统与运动系统特性,取控制变量u=θ,状态变量x=[x1x2]T=[npm]T,其中,pm为进气歧管压力。那么发动机模型可以通过状态方程描述为[17]
(2)
其中
f(u)=kth0+kth1θ+kth2θ2+kth3θ3
K1=ke0+ke2λLth+ke3(λLth)2+ke4σ+ke5σ2
K2=π(ke1+ke9σ+ke10σ2)
K3=ke6+ke8σ
式中,J为系统转动惯量;Tl为发动机负载转矩;R为气体常数;Tm为进气歧管温度;Vm为进气歧管容积;pamb为环境压力;Lth为汽油理论最佳空燃比(Lth=14.67);λ为等价空燃比;σ为发动机点火提前角;kmo、kl、kth、ke为发动机平均值模型的系统参数[18]。
对式(2)中的第一个状态方程进行微分,可得
(3)
kl3-2kl4x1)χ(x)+K2(kmo1+2kmo2x2+kmo3x1)ε(x)]

cη(x)f(u)=δ(t,x)+ζ(t,x)u
(4)

采用“Super twisting”方法设计的滑模控制率为
u(t)=u1(t)+u2(t)
(5)
其中
控制系统收敛条件为
(6)
其中,s0为准滑模动态的边界层,这里取s0=0;参数W、ρ和μ为待整定参数。这里采用类似于Ziegler-Nichols PID参数整定方法,固定其中两个参数,调整另一个直至系统的响应速度、超调量、稳态精度等指标均满足要求。经参数整定取W=6.8,ρ=0.5,μ=2.2。同时,为满足式(6)所列的控制系统的收敛条件,令Φ=1.17×103,Γm=219.17,ΓM=1.15×103。系统初始条件x(t0)=[1200 r/min80 kPa]T,u(t0)=10时,发动机转速控制系统的转速响应曲线和控制变量节气门开度曲线如图5所示,从图5可以看出,转速控制系统能够快速跟随转速指令,同时对负载波动具有较好的鲁棒性。
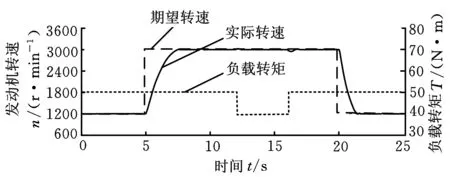
(a)转速响应
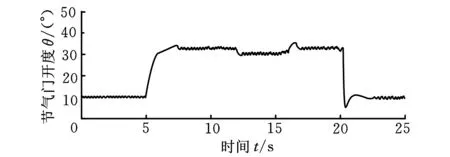
(b)节气门开度图5 发动机转速曲线和节气门开度曲线
2.3基于电压定向的PWM整流器直接功率控制
由图3可知,转速切换/功率跟随增程器协调控制系统是通过调节PWM整流器的输出功率从而间接实现对发动机转矩的调整的,那么实现对PWM整流器输出功率的精确控制是系统的关键步骤。在增程器中,三相永磁同步电机输出的三相交流电必须通过整流装置进行整流后才能与直流母线连接。增程器中常见的整流装置有不控整流器(二极管整流器)、相控整流器(晶闸管整流器)和PWM整流器(门极关断功率开关管)。不控整流器输出的直流电压不可控,相控整流器的交流侧功率因素较低、动态响应较慢,这限制了它们在增程器中的应用。
PWM整流器具有动态响应速度快、交流侧功率因素可调的优点,同时还可以工作在有源逆变状态,驱动永磁同步电机拖动发动机启动[19],免除了额外的发动机启动装置,所以本文采用PWM整流器作为增程器整流装置。为了实现增程器的输出功率对整车功率需求的跟随,必须使PWM整流器工作在功率闭环输出状态,因此采用基于电压定向的直接功率控制对PWM整流器的功率输出进行闭环控制。
基于电压定向的PWM整流器直接功率控制不需要将输出功率换算成相应的电流来进行控制,而是将PWM整流器输出的瞬时有功功率和瞬时无功功率作为控制量直接进行闭环控制[19]。基本的控制思路是:首先对PWM整流器的瞬时有功功率p和无功功率q进行检测运算,再将其检测值与给定值p*和q*的偏差分别送入两个滞环比较器中,最后根据滞环比较器的输出以及交流侧电压矢量的位置确定功率开关管的开关状态sa、sb和sc。这里,PWM整流器在单位功率因数下运行,故q*=0。控制系统的结构框图如图6所示。
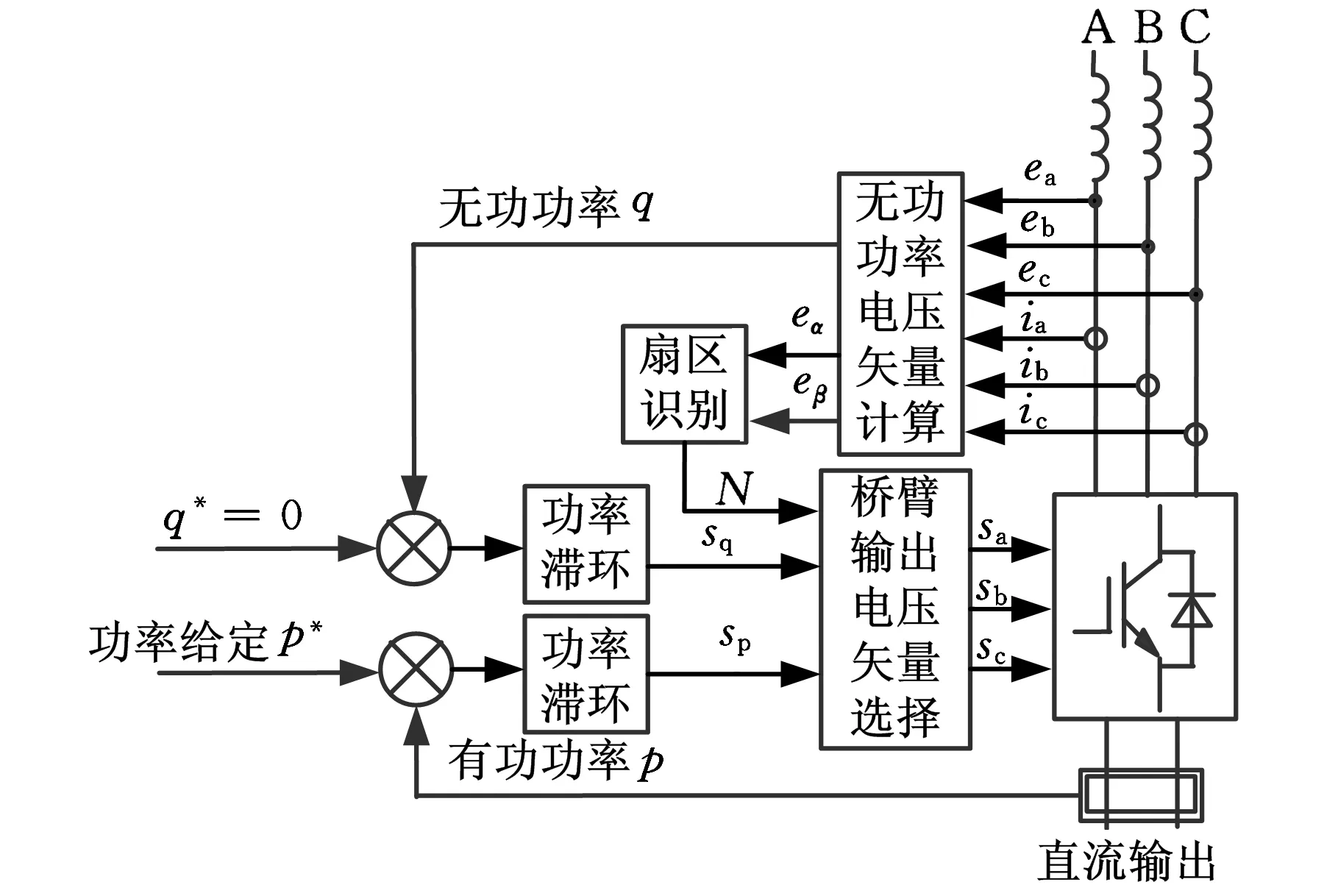
图6 PWM整流器直接功率控制

(7)
为了消除PWM整流效率对功率跟随精度造成的误差,有功功率p的计算是通过对直流侧的电压VDC和电流IDC的测量得到的,即
p=VDCIDC
(8)
定义功率滞环比较器的滞环宽度为2Hp,那么有功功率滞环比较器和无功功率滞环比较器的输出分别为
(9)
(10)
sp和sq是反映实际功率偏离给定功率程度的开关函数,根据开关函数sp、sq以及Eabc所处的扇区N便可以确定功率开关管的开关状态sa、sb和sc,实现PWM整流器的功率闭环控制[20]。
3 仿真模型与结果分析
3.1仿真模型
为了验证转速切换/功率跟随增程器协调控制策略的可行性与控制效果,在AVL Cruise车辆控制与动力学仿真软件下搭建了基于转速切换/功率跟随增程器协调控制策略的增程式电动汽车模型,模型结构如图7所示。
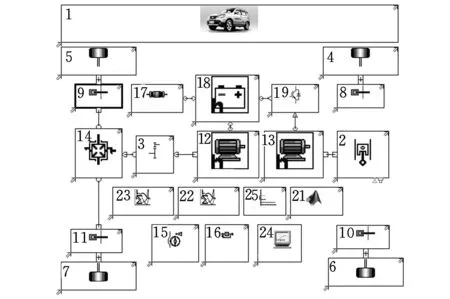
1.增程式电动汽车 2.2缸汽油发动机 3.主减速器4.左后轮 5.左前轮 6.右后轮 7.右前轮 8.后盘式制动9.前盘式制动 10.后盘式制动 11.前盘式制动12.驱动电机(永磁同步电机) 13.永磁发电机 14.差速器15.驾驶室 16.主动稳定控制系统 17.电气系统 18.锂电池19.PWM整流器 21.APU控制单元 22.电驱动控制系统23.电制动和机械制动单元 24.在线监控器 25.控制常量图7 AVL Cruise仿真模型
车辆模型主要包括永磁同步驱动电机(模块12)、动力电池(模块18)、驱动控制单元(模块22)、制动能量回馈控制单元(模块23),增程器主要由汽油机(模块2)、永磁同步发电机(模块13)和PWM整流器(模块19)以及增程器控制单元(模块21)构成。其中增程器控制单元调用的是在MATLAB/Simulink下创建的DLL文件,通过AVL Cruise提供的MATLAB DLL接口与仿真模型通信,增程器控制单元的Simulink顶层仿真模型框图见图8。
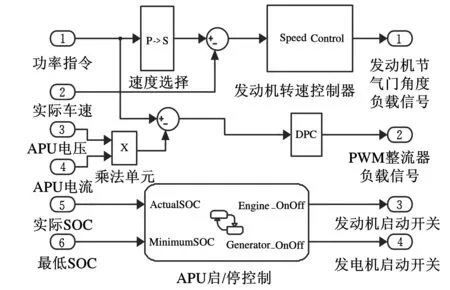
图8 增程器控制单元Simulink仿真模型
根据发动机的转速-功率-比油耗特性,仿真中所采用的功率-转速切换表见表1。整车能量管理策略可描述为当动力电池SOC低于SOC增程器启动下限SOCmin时便启动增程器,增程器工作于功率跟随模式。这里SOCmin设置为40%,SOC的初始值为45%。

表1 功率-转速切换表
表2列出了整车的基本参数以及主要动力部件参数。
A组患者以1μg·kg-1·h-1的速率泵注右美托咪定48h,如发现不可控的心动过缓或低血压,停止泵注。B、C两组不给予右美托咪定泵注,A、B组其余治疗相同。应用视觉模拟评分法 (visual analog scale,VAS)、以单盲法对患者入院当时(≤伤后6 h)(T1)、伤后 24h(T2)、7 d(T3)疼痛程度进行评估。0 为“无痛”;10 为“最剧烈的疼痛”。
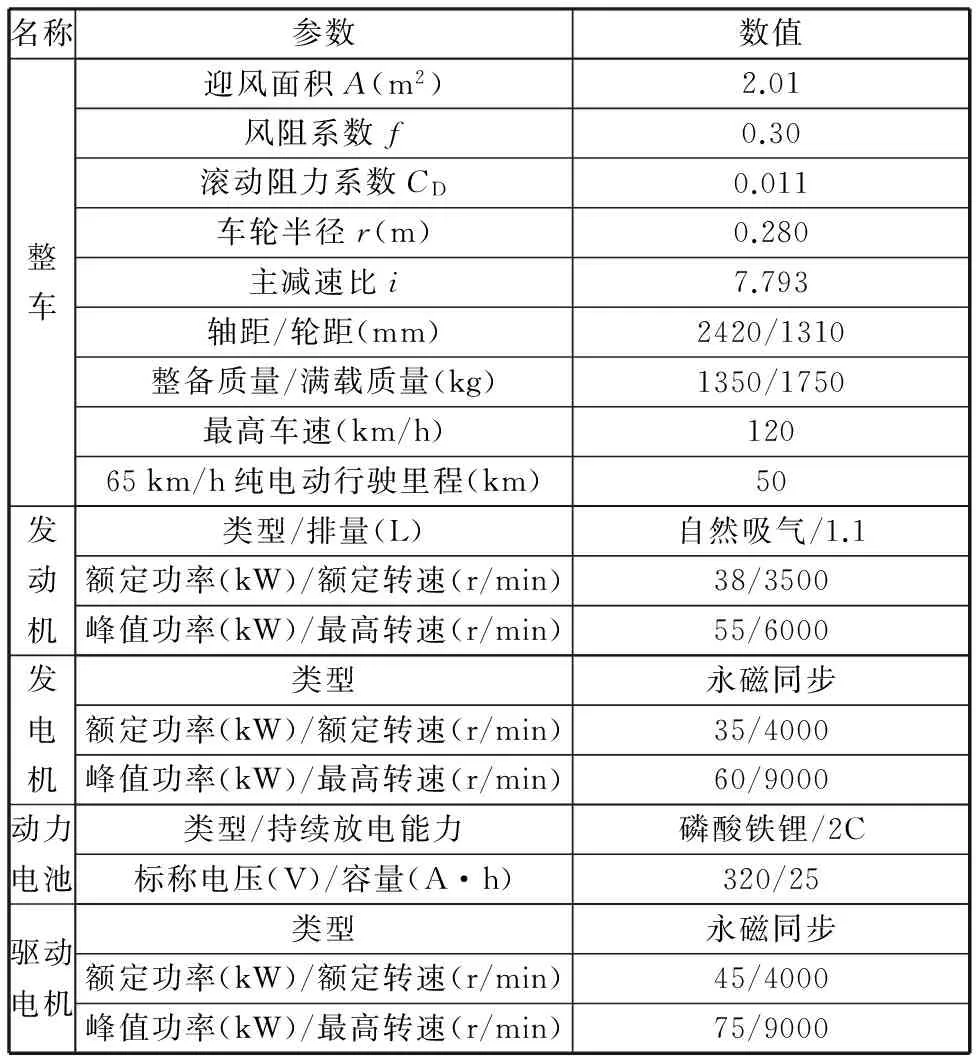
表2 整车及动力系统参数
3.2结果分析
仿真采用的EUDC工况的速度、加速度和行驶里程曲线如图9所示。在该工况下仿真得到的整车功率需求曲线、发动机转速曲线和增程器输出功率曲线如图10所示。

图9 EUDC工况示意图
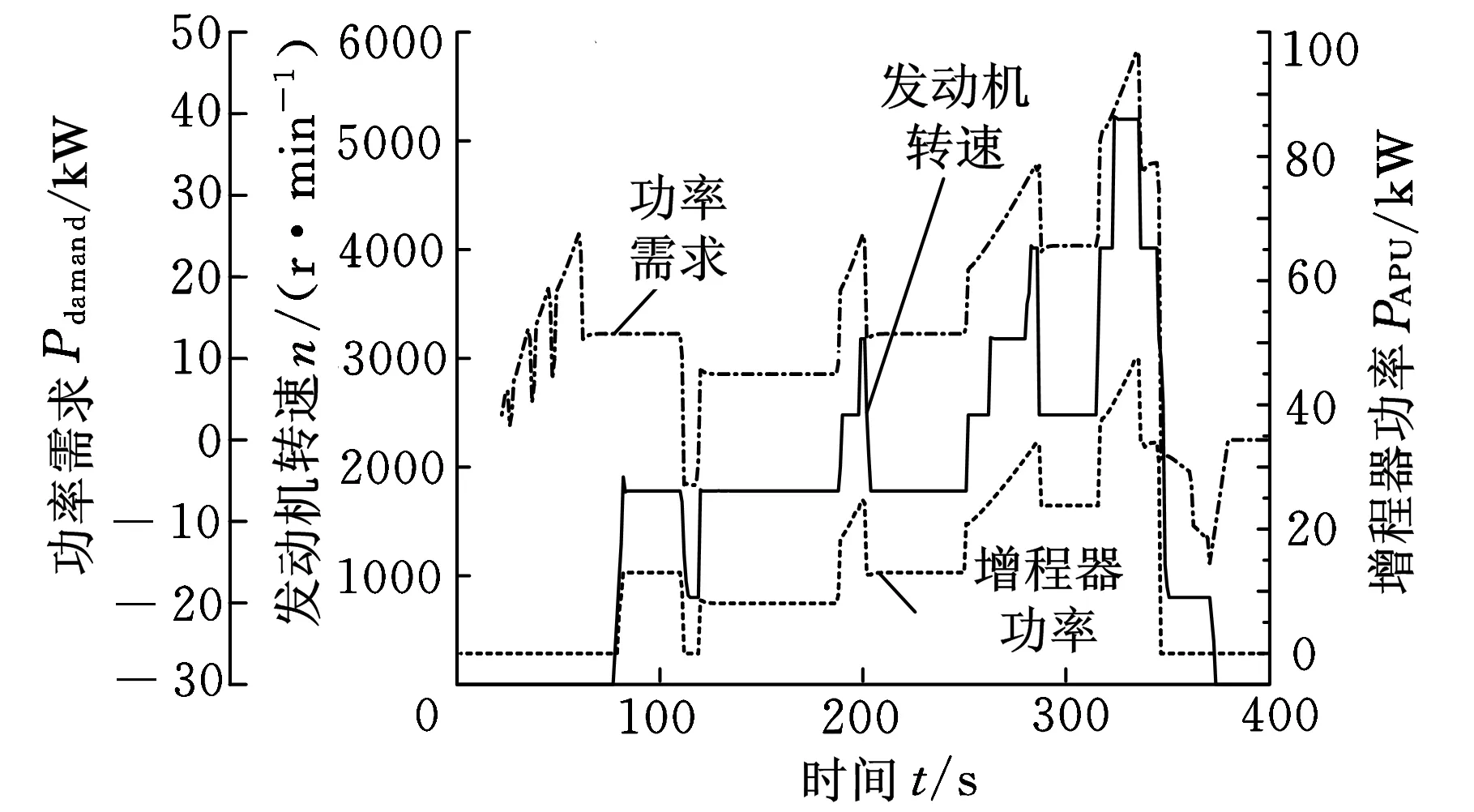
图10 功率需求、发动机转速和增程器功率曲线
从图10中可以看出,增程器启动后,发动机转速根据整车的功率需求工作在设定的转速点,同时增程器的输出功率随着整车的功率需求变化而变化。整个EUDC工况中动力电池的电压曲线、电流曲线和SOC曲线如图11所示。从图11中可以看出在工况的前80 s,由于动力电池SOC大于40%,增程器未启动,此时动力电池的输出电流随整车的功率需求波动,同时由于内阻压降,动力电池电压波动较大。当增程器启动后,动力电池的输出电流基本为零,只有在发动机转速切换时有小幅波动,同时在车辆制动时,动力电池吸收制动回馈电流。动力电池SOC基本保持在40%,缓慢的SOC下降是由给车辆低压系统供电的DC/DC直流变换器造成的,在第350 s左右,由于车辆的制动回馈电流较大,故动力电池SOC发生轻微上升。
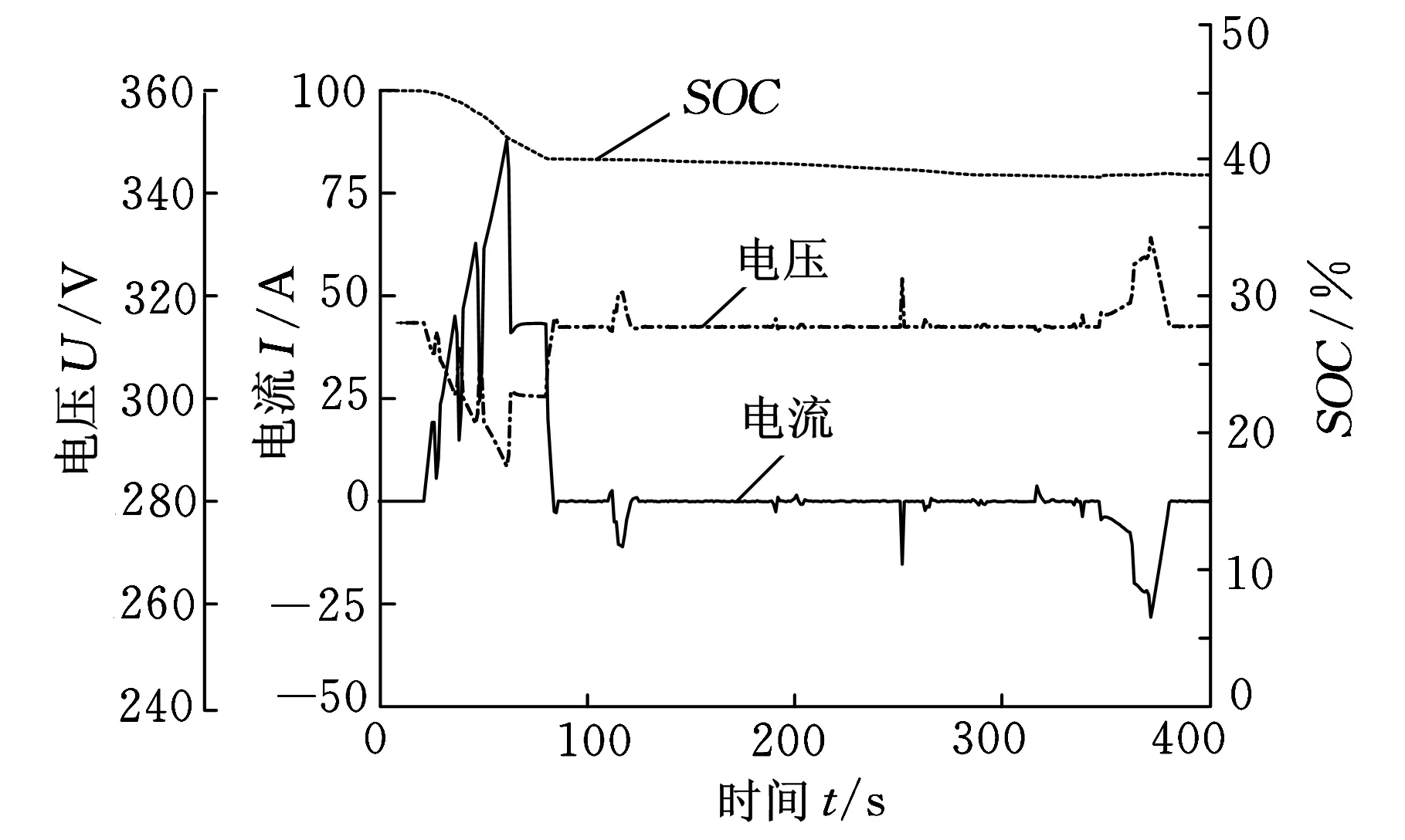
图11 动力电池电压、电流和SOC曲线
图12描述了发动机在相应工作点的工作时间占全部时间的百分比。从该图可以看出,在6个设定目标转速点,发动机的工作时间均占较大的比例。占比例较低的工作点为发动机转速以及
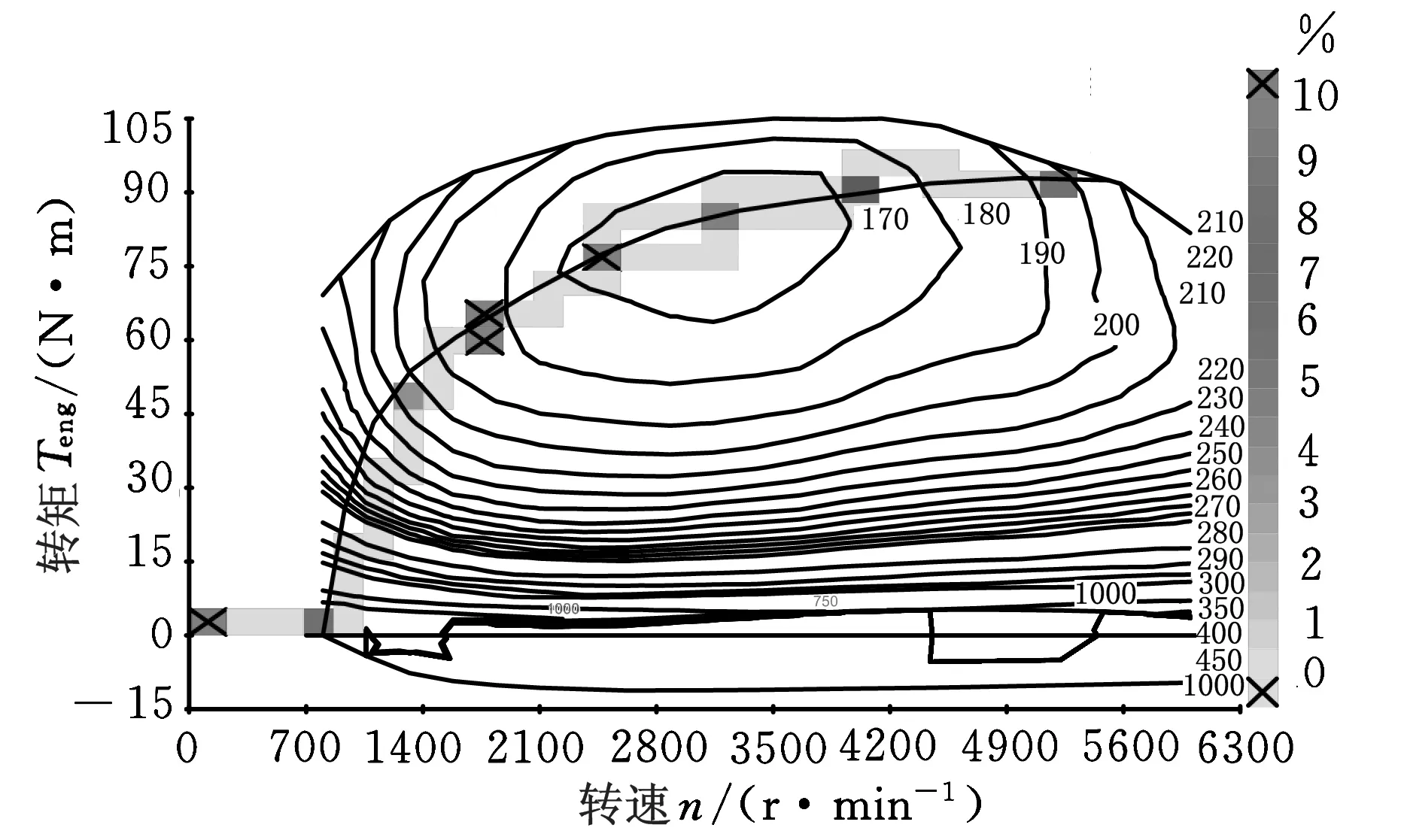
图12 发动机工作时间分布图
PWM功率调整过程中的过渡工况。综合而言,发动机的工作点分布在围绕最佳BSFC曲线的狭长区域内。
4 结论
(1)基于平均值模型的发动机转速二阶滑模控制器能够快速、准确地响应发动机的转速给定,并且对负载突变具有较强的鲁棒性。(2)基于电压定向直接功率控制的PWM控制器的功率闭环控制能够准确地跟随整车的功率需求。增程器启动后动力电池的电压、电流和SOC在车辆运行过程中波动较小,延长了电池使用寿命。(3) 采用转速切换/功率跟随增程器协调控制策略,发动机的工作点集中在一条围绕最佳BSFC曲线的狭长区域内,有效地改善了整车的燃油经济性和排放性能。
[1]李涛,陈猛.增程式公交车动力系统设计及实例化研究[J].中国机械工程,2011,22(14):1759-1763.
Li Tao,Chen Meng.Design and Instantiation of Increased Program Bus Power Train System[J].China Mechanical Engineering,2011,22(14):1759-1763.
[2]Aharon I, Kuperman A.Topological Overview of Powertrains for Battery-powered Vehicles with Range Extenders[J].IEEE Transactions on Power Electronics,2011,26(3):868-876.
[3]Dispenza G,Andaloro G,Sergi F,et al.Modeling of a Range Extender Power Train for a City Bus[J].ECS Transactions,2012,42(1):201-208.
[4]Wang Canfei,Jin Mengjia,Shen Jianxin,et al.A Permanent Magnet Integrated Starter Generator for Electric Vehicle Onboard Range Extender Application[J].IEEE Transactions on Magnetics,2012,48(4):1625-1628.
[5]Hai Taomin,Dong Jinye,Yuan Binyu.Analysis of Control Strategy for Extended-range Electric Vehicle[J].Applied Mechanics and Materials,2012,135(1):261-267.
[6]Mehrdad E,Gao Yimin,Ali E.Modern Electric,Hybrid Electric,and Fuel Cell Vehicles Fundamentals,Theory,and Design[M].2ed. Boca Raton:CRC Press,2010.
[7]林巨广,顾杰,余向东.基于模糊理论的SHEV发电机组控制策略研究[J].中国机械工程,2013,24(14):1983-1987.
Lin Juguang,Gu Jie,Yu Xiangdong.Study on SHEV Generator Grup Control Strategy Based on Fuzzy Theory[J].China Mechanical Engineering,2013,24(14):1983-1987.
[8]He Bin,Yang Minggao.Robust LPV Control of Diesel Auxiliary Power Unit for Series Hybrid Electric Vehicles[J].IEEE Transaction on Power Electronics,2006,21(3):791-798.
[9]Sun Dongye,Lin Xinyou,Qin Datong,et al.Power-Balancing Instantaneous Optimization Energy Management for a Novel Series-parallel Hybrid Electric Bus[J].Chinese Journal of Mechanical Engineering,2012,25(6):1161-1170.
[10]Carlos E,Abdul R,Zhu Guoming,et al.Trajectory Optimization for the Engine-generator Operation of a Series Hybrid Electric Vehicle[J].IEEE Transaction on Vehicular Technology,2011,60(6):2438-2447.[11]Xu Weihua,Vicent K,James M.Application of Nonlinear Transformations to A/F Ratio and Speed Control in an IC Engine[J].SAE,1999-01-0858.[12]Mohammad K,Keng G,Sarah S.Second Order Sliding Mode Control of a Desiel Engine[J].Asian Journal of Control,2003,5(4):614-619.
[13]Utkin V.Variable Structure System with Sliding Mode[J].IEEE Transaction Automatic Control,1977,22(2):212-222.
[14]Young D, Utkin V,Ozguner U. A Control Engineer’s Guid to Sliding Mode Control[J].IEEE Transaction on Control System Techonolgy,1999,7(3):328-342.[15]Arie L.Principles of 2-sliding Mode Design[J].Automatic,2007,43(4):576-586.
[16]Levant A.Sliding Order and Sliding Accuracy in Sliding Mode Control[J].International Journal of Control,1993,58(6):1247-1263.
[17]Mohammad K,Sarah S,Paul P.Rubust Speed Control of an Automative Engine Using Second Order Sliding Modes[C]//Proceedings of the Eurpean Control Conference.Porto,Portugal,2001:974-978.[18]Elbert H,Spencer S.Mean Value Modelling of Spark Ignition Engines[J].SAE,1990,900616.
[19]张兴,张崇巍.PWM整流器及其控制[M].北京:机械工业出版社,2011.
[20]Toshihiko N,Hiroaki T,Seiji K,et al.Direct Power Control of PWM Converter Without Power-source Voltage Sensor[J].IEEE Transaction on Industry Application,1998,34(6):473-479.
(编辑袁兴玲)
Cooperative Control Strategy of Power Following-speed Switching in a Range Extender Electric Vehicle APU
Shen Yongpeng1Wang Yaonan1Meng Bumin1Yi Dihua2
1.Hunan University,Changsha,410082 2.BAIC Motor Electric Vehicle Co., Ltd.,Beijing,102606
To solve the cooperative control problem of the engine and generator in APU system,the speed switching-power following APU cooperative control strategy was proposed herein.Firstly,the power-speed switching table of the engine was designed according to the optimal brake specific fuel consumption(BSFC) curve.Then,a second order sliding mode controller of the engine speed was designed,which was based on the engine mean value model.Meanwhile,the PWM rectifier output power controller was designed,which was based on the direct power control algorithm.Through the closed-loop control of the engine speed and PWM rectifier power,the proposed control strategy forced the engine to run along the optimal BSFC curve.Finally,the joint simulation model was developed based on AVL Cruise and MATLAB/Simulink.The simulation results show that the proposed APU cooperative control strategy is excellent in aspects of power following and speed controlling accuracy,battery voltage,current and state of charge(SOC) fluctuations,as well as the operating points distributions.
range extender electric vehicle;auxiliary power unit(APU);cooperative control;second order sliding mode control;direct power control
2014-02-11
国家高技术研究发展计划(863计划)资助项目(2012AA111004);国家自然科学基金资助项目(61104088)
U469.7DOI:10.3969/j.issn.1004-132X.2015.12.022
申永鹏,男,1985年生。湖南大学电气与信息工程学院博士研究生。主要研究方向为混合动力汽车优化控制技术。王耀南,男,1957年生。湖南大学电气与信息工程学院教授、博士研究生导师。孟步敏,男,1986年生。湖南大学电气与信息工程学院博士研究生。易迪华,男,1979年生。北汽新能源汽车有限公司工程师。
猜你喜欢
汽车实用技术(2022年4期)2022-03-07
科学家(2021年24期)2021-04-25
汽车实用技术(2020年2期)2020-02-25
自动化学报(2019年12期)2020-01-19
中国惯性技术学报(2019年6期)2019-03-04
汽车文摘(2017年5期)2017-12-05
汽车文摘(2017年10期)2017-12-02
北京航空航天大学学报(2017年4期)2017-11-23
电子制作(2017年19期)2017-02-02
北京航空航天大学学报(2016年7期)2016-11-16