
一种基于历史数据统计的起飞前航迹预测分析算法
2015-10-27 04:06罗秦王艳波
电脑知识与技术 2015年21期
关键词:数据挖掘
罗秦 王艳波


摘要:随着我国国民经济高速发展,越来越多人将民航飞行作为出行首选,航班流量管理也越来越受到业界重视,而航迹预测是流量管理工作开展的根本。该文研究和分析了雷达数据处理和航迹预测算法,使用基于角平分线垂直交叉的方法实现雷达航迹判断,使用历史数据挖掘航班航段经验飞行时间。历史数据挖掘算法分三个步骤,第一步是采样,第二步是使用防脉冲干扰平均滤波算法进行除噪,第三步对剩余样本求平均值。目前该方法已应用到中南地区航班协同放行系统中,取得了较好的应用效果。
关键词:雷达数据处理;航迹预测;数据挖掘
中图分类号:TP391 文献标识码:A 文章编号:1009-3044(2015)21-0175-03
近年来,随着我国国民经济快速发展,航班量逐步增长,流量管理也越来越受到民航系统重视。航迹预测是航班流量管理的基础,航迹预测不准确,无法实现有效的流量管理。
中南地区航班协同放行系统在建设过程中,遇到的第一个难题就是如何实现起飞前准确的预测航班飞行轨迹。本文将详细介绍中南地区航班协同放行系统中航迹预算方法的实现,并介绍在算法实现过程中遇到的问题及解决方法。
中南地区航班协同放行系统采用的航迹预测算法分以下几个步骤:1)基于角平分线的综合雷达航迹处理;2)雷达历史数据挖掘;3)航迹预测计算。
1 综合雷达航迹处理算法介绍
空管自动化系统中多雷达数据融合处理后的航迹信息包括航班号、高度、二次代码、速度和位置信息等。航迹过点事件判断是航路相关监视(Route Adherence Monitor, RAM)的一种,是对航班实际飞行过程中的飞行轨迹进行计算和判断,当接近或飞越航路固定点时,触发相应事件的过程。此类事件可用于落地时间预测、进出管制区域预测、统计空中交通流量统计、航路航线偏离告警等。事件判断的实时型、准确性和效率至关重要。
本文采用一种分角平分线的算法,对航迹过点事件进行设计和建模,并根据是否与飞行计划建立关联,对算法的效率、误差进行分析。提出并实现一种可配置的、高效的航迹过点事件判断算法。
综合雷达航迹的数据包按照一定的数据协议进行封装,以字节数组的方式在网络上传输。使用信息需先进行监视数据包的解析,提取与航班相关的四维状态信息,包含经纬度、气压高度(或地理高度)、飞行高度层、速度、爬升率、加速度等;相关航迹还需提取飞行计划信息,包括航班号、机型、尾流等级、起降机场、相关时间等。不同航班的航迹信息通过航迹号和应答机编码区分,以一定的频率(4秒)向外输出。以上信息组成一个航迹信息(Track Information Object)对象。
空域态势(Area Snapshot)是某监视区域上空所有航班飞行态势的一个快照。监视区可定义为一个由若干边界点围成的二维平面多边形,监视区包含多个固定点(Fixed Point)组成的列表,航班实际飞越这些固定点时,系统将触发相应的过点事件。以应答机和航迹号为关键字,每一个实际航班对应一个航班航迹(Flight Track Object)对象,航班航迹对象包含一个航班状态(Track Status Object)对象的数组,记录最近若干次的四维状态信息。
航路走廊宽度(Route Corridor Width)和航路点半径(Route Point Radius)是在进行航路相关监视时的两个重要参数。航路走廊以航段两端固定点连线为中心线,向外扩展指定宽度,相关标准指定航路走廊宽为20海里(左右两侧各10海里),航路点半径经验值为20海里。上述参数可根据需求调整。
1.1 常规算法及应用
目前的管制综合信息系统中,对航迹过点的判断采用的方法是:当航班航迹更新时,根据监视区范围。对范围内的固定点的经纬度和航班经纬度进行遍历匹配,当二者距离小于等于设定阈值,即航迹出现在航路点半径区域内时,触发过点事件。
改算法普遍运用在中南各地FIPS系统雷达相关程序、区管前置系统雷达相关程序、协同放行系统雷达相关程序等。程序存在以下缺点:1)过点事件判断算法准确度不高;2)雷达数据解析、事件判断、应用逻辑耦合在一起,扩展性不强;3)数据库访问频繁,容易造成数据库死锁;4)配置文件基础数据维护繁琐。
1.2 基于角平分线的综合雷达航迹处理算法
航班的最新历史经过点(Last Pass Point)、当前经过固定点(Current Pass Point)、下一经过固定点(Next Pass Point)组成一个夹角。航班飞过固定点区域时,航迹曲线将与此夹角的角平分线相交,且交点在航路点半径区域内。
综合雷达航迹按指定频率输出航班的位置信息,是航迹曲线的定时抽样。当相邻的航迹位置点构成的直线与角平分线相交,且交点在事件判断有效区域内时,表示航班飞过当前固定点。
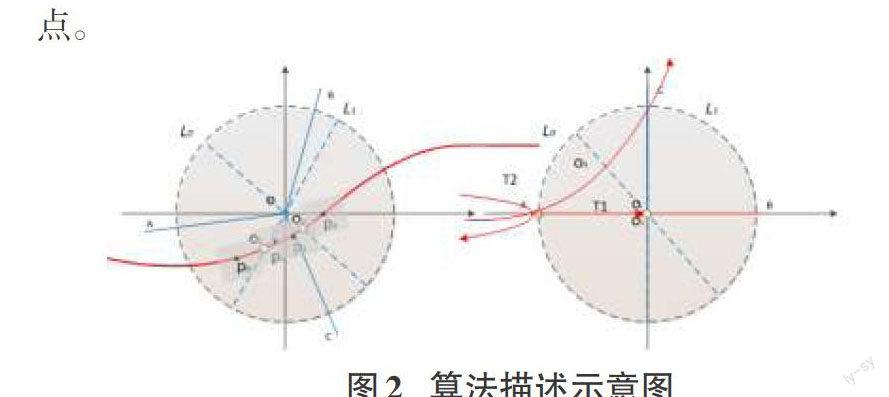
如上左图,红色曲线表示某航班航迹(方向由左向右),P0、P1、P2、P3为综合雷达航迹输出的连续位置点。航线段AO、OB、OC交汇于固定点O,L0、L1所在直线分别为∠AOB和∠AOC的平分线,航班轨迹与L0、L1相交点为O0、O1。圆O内阴影区域为航班过点事件判断有效区域。如果航班的航路是从A经过点O到达B,则O0点为事件触发点;如果航路是从A经过O到达C,这O1点为事件触发点。
过点时间准确性方面。在老算法中,红色曲线与圆弧左侧的交点即触发过点事件。而利用本算法,在O0或O1才真正出发过点事件,准确性明显提升。
针对本算法(如上右图),当飞行轨迹垂直穿过圆心时(T1),即AO进,OB出,在原点处判断出过O点,准确度最高;当飞行轨迹与圆相切时(T2),即从AO进,OA出,在切点A处判断出过点事件,与老算法一致。
T1航迹判断过点事件时间最晚,精度最准确;T2航迹判断过点事件时间最早,精准度最差。如果假设飞行的巡航速度为V千米/小时,圆区域的半径为R千米。两者时间差为:R / V * 3600 秒。假设圆的半径为20公里,飞机巡航速度为800KM/h,时间差为90秒。
初始化阶段,根据航迹编号、应答机(、航班号)信息建立航班航迹字典(或者Hash Table)相应记录,键值对通过应答机等信息的组合形成唯一键。
下图紫色虚线框所示区域内,包括A1~A3,B1~B3等12个固定点,包括AW1、AW2、AW3等三条航线。
初始LPT点确定。根据航班历史航迹(History Flight Track),若指定(VSP参数)连续历史航迹在同一航线段内,表示该航班正飞越此航线段。并根据航向确定其最新历史经过点(LPT),航向偏差根据VSP参数设定(正负10度)。如下图航迹FlightTrack01在通过AW2S1航线段时,若方位角在区间[90 – VSP, 90 + VSP],其LPT点为A0。
在算法实现上,根据综合雷达航迹是否与数据库中的航班计划进行匹配,算法又分为两种方式实现:不进行航班匹配方式和进行航班匹配方式。
1.3不进行航班匹配
不进行航班匹配则不知道航班的FPL航路,则NPT可能有多个备选,需要计算多个过角平分线时间,事件的触发时间推迟到下一个航段确认时。此时需要对所有可能CPT点进行遍历:与CPT点连接的航线段的毗邻端点为可能NPT点,当航迹进入这些CPT点的事件判断区域时,用角平分线算法进行过点事件判断。如下图,若航迹在由IDUMA飞往SHL的航线段上,LPT为IDUMA,CPT为SHL,NPT可能的集合为(YIN、POU、LMN、CON、NUSLA、K)。一旦航迹进入RPR区域,则进行过点判断。分别判断出所有过角平分线时间,当航迹进入下一个航段时,可确定下一个CPT时,选择一个正确的角平分线时间,并触发过点事件。
此种情况的优势是:1)不许与数据库交互;2)事件计算相对准确。劣势在于:1)事件触发事件有延迟,延迟的大小参考第4节的内容;2)计算量相对较大;3)对偏航的情况无法正确处理。
1.4进行航班匹配
进行航班匹配的目的是为了分析出航班的计划航路信息,作为算法判断的依据。管制综合信息系统的航班计划存储在中心数据库中。进行过点事件判断前,先确认航班的计划航路,以此为依据确认NPT点,过角平分线计算出过点时间即触发过点事件。此种应用模式既提高了时间判断的准确性,又提高了事件响应的及时性;对偏航的处理更加灵活。但需要与数据库进行实时交互,可通过将数据库信息取回本地或缓存的方式改善。
2 经验飞行数据挖掘算法
在中南地区航班协同放行系统中,系统自动采集最近15天之内的所有雷达采样数据,并按机型进行分类整理。经验飞行数据挖掘以历史雷达数据为基础,但由于存在管制指挥盘旋、直飞等因素,历史雷达数据记录的航班过关键点数据与实际正常飞行数据往往存在误差,因此在对雷达历史数据进行挖掘前需对记录的数据进行除噪。
常见的雷达历史数据除噪算法有:限幅滤波法、中位值滤波发、算术平均滤波法、防脉冲干扰平均滤波法等。
本文采用的除噪算法是防脉冲干扰平均滤波法,它具有运算简单,在滤波除噪的同时,可以很好地保护信号的细节信息。
A机型航班,从P1点飞往P2点的经验飞行数据挖掘方法如下:
1) 连续采样最近7天内A机型从P1点飞P2点的经验飞行时间,样本总数为N;
2) 将样本值按从小到大的顺序排列;
3) 去掉列头的N*0.2个最小样本;
4) 去掉列尾的N*0.2个最大样本;
5) 将剩余的样本求平均值,即是A机型航班,从P1点飞往P2点的经验飞行时间。
3 航迹预测算法
航迹预测算法以经验飞行数据挖掘算法的结果为基础,对A机型从机场A1飞往机场A2,途中经过P1、P2……PN的预测过程就是一个经验时间不断累加的过程,在此不做详述。
4 常见问题及解决方法
4.1起飞地到走廊口经验时间难以挖掘
从起飞机场到走廊口的经验飞行时间挖掘存在以下两个困难,会导致挖掘数据与实际偏差较大:
1) 跑道方向不同,飞行时长不同;
2) 起飞场到走廊口可能会直飞,导致样本差别较大。
针对该问题,有两种解决方法:
1) 由管制员人工指定从起飞场到走廊口的经验飞行时间,指定的时间中需考虑跑道方向、直飞等因素;
2) 系统在历史数据记录和挖掘时,考虑跑道方向和直飞等因素。
4.2 风向突变会导致系统数据挖掘不准确
如果风向突然发生改变,如昨天刮东风,今天刮西风,会导致系统挖掘的经验时间无法满足现场管制需求。据中南空管局运行管制中心的跟踪数据,在风向突变的情况下,从西往东横穿中南空域的时间差异最长可达20分钟。由此可见,风向突变对系统预测的效果影响很大。
针对该问题,可采用当前空中实时飞行数据进行挖掘,以弥补采用历史数据统计和挖掘带来的缺陷。
4.3高度速度的挖掘
高度和速度往往具有不确定性,建议直接采用该航班前一架次的历史高度和速度数据。如CCA1303航班,7.2日过某些重要报告点的高度、速度,可直接取7.1日同架次航班的飞行高度、速度历史数据。
5 应用和总结
以该算法为基础的中南地区航班协同放行系统于2012年在中南空管局全局投入使用,取得了较好的应用效果。
中南地区通过ATM联网,实现了河南空管分局、湖北空管分局、湖南空管分局等所辖十多个空管分局站主用ATC系统的综合雷达航迹引接。引接的雷达航迹通过拼接的方式,与区管莱斯自动化系统雷达数据进行融合,再引入中南地区航班协同放行系统。
协同放行系统的数据挖掘算法通过先采集综合雷达航迹数据,再进行除噪,最后对剩余的数据样本求平均值,执行一次数据挖掘的时长不超过30秒。
据统计,采用该算法预测的起飞前轨迹,与航班实际执行偏差在5分钟以内为94.8%,能完全满足中南地区对航班起飞前流量管理的需要。
参考文献:
[1] 姚凤.NUMEN2000 自动化系统航迹高度跳变问题分析[J].民航科技, 2014(5).
[2] Micheal Nolan, Air Traffic Control[Z]. Wadsworth Publishing Company.
[3] Odell Mark. Air traffic control shortage double delays[Z]. Financial Times. London(UK)
猜你喜欢
大众投资指南(2021年35期)2021-02-16
中国交通信息化(2020年1期)2020-07-27
电力与能源(2017年6期)2017-05-14
中国中医药信息杂志(2016年7期)2016-12-01
信息通信技术(2015年6期)2015-12-26
河南科技(2014年23期)2014-02-27
河南科技(2014年19期)2014-02-27
电子设计工程(2014年18期)2014-02-27
电子设计工程(2014年18期)2014-02-27
智能系统学报(2013年1期)2013-01-28
