
基于“教学学术”理念的倒立摆控制系统设计
2015-10-26 18:38张秀玲等
教学研究 2015年5期
关键词:虚拟实验
张秀玲等
摘要:以三级倒立摆控制系统为研究对象,在LabVIEW平台结合MATLAB设计了自动控制虚拟实验系统并应用于“自动控制理论”的教学,使学生能直观的领会和理解自动控制原理课程的主要内容,对调动学生的学习积极性以及提高学生的实验兴趣都有积极促进作用;为进一步拓展学生的科学研究能力,在课堂教学中引入“教学学术”理念,将教学任务视为科研任务,基于该理念开发设计了三级倒立摆控制系统,采用基于虚拟仪器代替传统实验仪器,减少了硬件设备需求,降低了实验系统的成本,整个过程促进了“教学学术” 理念在高等教育的普及推广,为提高素质教育做了有益尝试。
关键词:教学学术;MATLAB;LabVIEW;虚拟实验;倒立摆
中图分类号:G640文献标识码:A文章编号:10054634(2015)05003505
0引言
LabVIEW是美国国家仪器公司开发的一种图形化编程语言,采用图标来创建程序代码、数据流向用连线表示,是实现复杂系统仿真、通用编程、测量、数据分析等的理想语言。LabVIEW程序是由一个或者多个虚拟仪器(VirtualInstrument,Ⅵ)组成,Ⅵ的外观和操作通常是模拟了实际的物理仪器,每个Ⅵ都包括了前面板、程序框图和图标三部分。前面板是Ⅵ的图形化用户界面,是进行人机交互的窗口,模拟了物理仪器的控制面板,其包含旋钮、开关、按钮、图形、指示灯等图标,如图1所示。程序框图是定义Ⅵ功能的图形化源代码,由G语言的端口、图框、节点和连线构成,是实际可执行的程序,框图是由低级Ⅵ、常量、内置函数及程序执行控制结构组成,用连线来表示程序执行过程中各对象之间的数据流并定义数据流向,用端口来实现与前面板的控制和显示传递数据,用节点来实现函数的功能调用,用图框来实现程序控制命令的结构化,如图2所示。
“自动控制理论”是自动化专业很重要的一门专业基础课,教学目的是通过系统学习使学生掌握自动控制系统的分析与设计基本方法,为设计和分析调试复杂工业自动控制系统奠定理论基础。自动控制理论实验教学是检验与验证理论教学的必要环节,通过实验操作训练,学生可以加深对所学书本知识的理解,提高动手能力,锻炼和培养学生发现、分析和解决工程实践问题的能力。随着高等教育大众化,目前存在实验设备和实验场地有限,实验设备老化以及实验指导师资不足等问题,为解决教学资源不足问题,基于MATLAB的虚拟实验系统开发,用软件仿真模拟了实际硬件的全部功能。虽然解决了目前自动控制实验中的一些问题,并在一定程度上提高了目前“自动控制理论”教学效果。但是,MATLAB的界面开发能力较差,无法实现与硬件的直接联系,这些虚拟实验系统仅限于软件模拟,不能锻炼学生的动手能力和硬件调试能力。随着虚拟仪器技术的出现和计算机技术的发展,采用基于NI公司开发出的LabVIEW设计虚拟实验系统,结合数据采集卡,就能够实现既可以在课堂上进行模拟实验,又能结合硬件电路设备进行硬件实验的综合实验设计,可以显著提高教学效果和实验效果,但LabVIEW 在控制算法实现方面较薄弱,限制了应用程序的快速开发。
鉴于LabVIEW和MATLAB的特点和自动控制理论实验的教学现状1,[WW)]2:,有必要将二者有机结合,采用LabVIEW 和MATLAB相结合的方法,实现自动控制虚拟实验系统的研发设计。
1控制系统设计
1.1验证性实验系统设计
本设计涉及的用户管理程序由三部分组成:登录系统、主程序和输出结果。
主程序是设计关键,包含所有常规自动控制理论虚拟实验的程序,其程序框图如图3所示。主界面如图4所示。通过验证性实验系统的设计与调试,可以让学生深刻体会常规实验需要实验装置和各种元件的选择与人工进行的元件线路连接,自动化程度低,不利于参数调整,通过这种软件虚拟实验系统的设计,学生从感性上深深体会到了其灵活性和先进性,为今后深入应用学习专业课奠定了现代仿真技术基础,激发了学生学习的主动性和开发新系统的兴趣。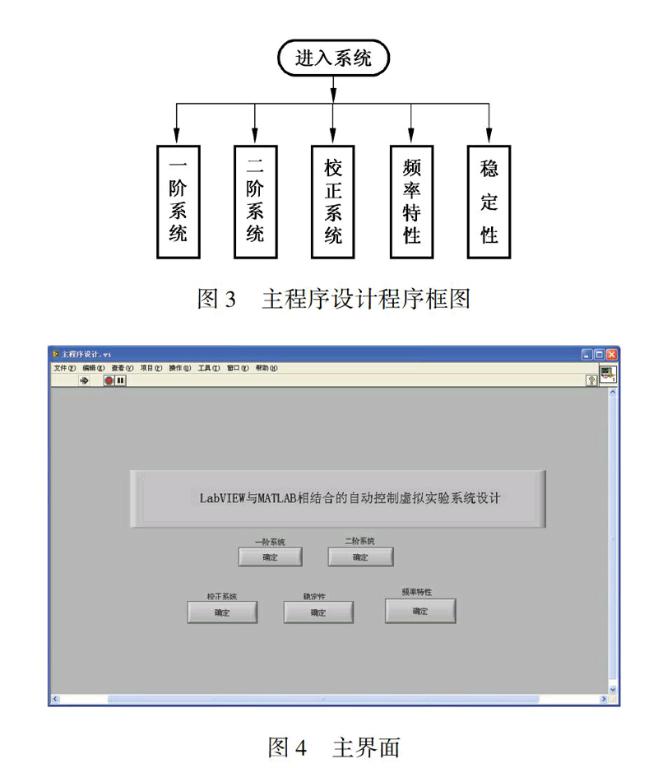
1.2可视化系统设计原理
三级倒立摆可视化三维仿真是在LabVIEW环境下,通过LabVIEW和MATLAB的混合编程来实现的。MATLAB具有强大的计算、绘图和数据处理等功能,它含有非常丰富的工具箱,广泛应用在数值分析、图像处理、动态系统仿真、信号处理、自动控制等领域,但是MATLAB在用户界面开发方面的功能远不如LabVIEW,而将二者结合起来进行混合编程,可以充分发挥利用两种应用软件的优点。
LabVIEW与MATLAB混合编程的方法有很多种,本设计采用通过LabVIEW的MatlabScript节点设计MATLAB程序代码,该节点可以直接在LabVIEW环境下运行编好的MATLAB程序,充分发挥两者的优势。
1.3引入“教学学术”理念
传统观念中,大学教学似乎是一种简单的知识传递过程,重于照本宣科式的讲述而忽视了与学生的互动交流。能否将“教学学术”理念引入教学,让教师将课堂教学当做科研工作进行呢?能否象做科研一样做教学工作呢?笔者做了有意的尝试,即在控制理论开课的第一节课上,首先从宏观角度让学生知道这门课程在本专业的地位和作用,让学生明确为什么要学?怎么学?最后要达到一个什么目标?具有何种工程实践能力?然后在授课过程中将一个非常有趣的倒立摆装置先介绍给学生,让他们意识到这是一个在复杂机器人、宇航装置中普遍存在的装置,该装置衡不稳定,通过控制理论这门课的学习,只要能利用所学知识设计一个倒立摆控制系统实现其稳定控制,就达到了这门课的学术要求。这样学生将在老师指导下分阶段完成系统建模、稳定性分析及整个控制系统设计与仿真调试,真正体验到了理论指导实践的过程,当“教学”成为“学术”,成为解决实际问题的途径,老师有教学成就感,学生也体验到通过学习而解决实际问题的乐趣,调动学生的求知欲和参与科研的快乐,教学从传统简单的知识传递转变为一个具有丰富内涵和无限探究空间的学术领域。
1.4三级倒立摆控制系统开发
1) 三级倒立摆的三维场景建立。三级倒立摆的三维模型是采用虚拟现实(Virtual Reality)技术建立的,首先采用SolidWorks制作好不包括摆杆的倒立摆三维模型,文件格式为VRML(Virtual Reality Modeling Language),然后利用LabVIEW 8.6 自带的三维控件工具箱将此VRML文件导入,如图5所示。再在这个三维模型基础上添加摆杆,进一步完善丰富三级倒立摆虚拟场景,如图6所示。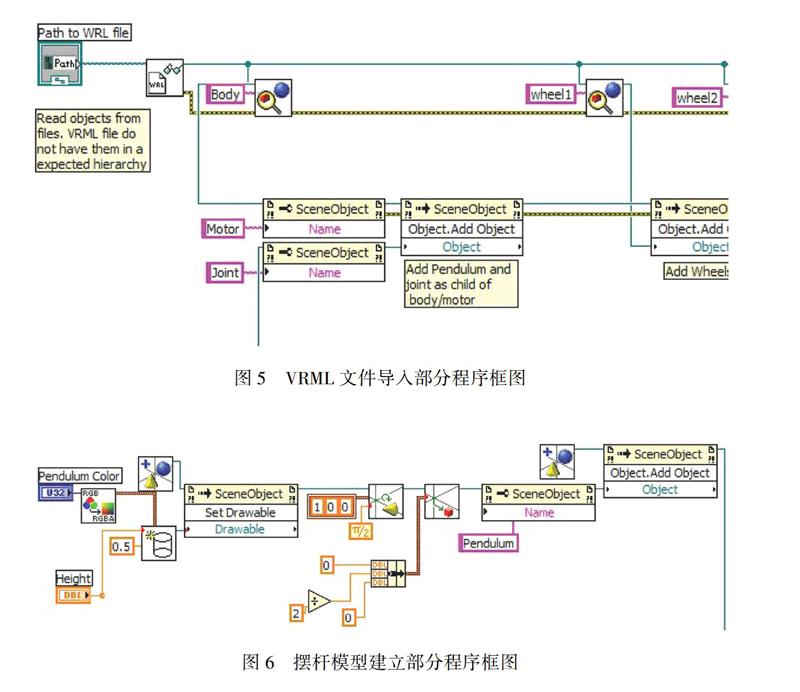
2) 三级倒立摆控制系统的可视化仿真系统设计。利用LabVIEW中子Ⅵ的相关知识,可以将倒立摆控制的可视化设计为一个整体的系统,系统中高一级的Ⅵ可以调用低一级的子Ⅵ,这样可以在一个整体的主界面中任意打开具有某一功能的子Ⅵ并运行,方便用户使用,设计脉络清晰,界面简单美观。为配合创新实践教学,提高学生的科学研究与研发能力,设计了倒立摆虚拟实验系统,主界面如图7所示,控制效果动画如图8所示。限于篇幅详细设计过程请参见作者发表的学术论文。在此只是通过设计的结果强调“教学学术”理念的含义,既学以致用,理论可以指导实践的新型教改思想,而不再是以简单传授为目的,像科学研究那样做教学工作。
由图8可知,可视化仿真中不仅可以看到可视化的虚拟模型,还可以对对象进行操作控制,比起仅有仿真曲线图的环境,倒立摆三维可视化仿真提供了一个较为逼真的三维视图,并且可以多方向多角度地观察控制过程中摆杆的摆动以及小车受控制器控制的整个移动过程。
2知识点总结
设计任务的完成与所学的自动控制理论内容的关系如下。倒立摆建模利用自动控制理论第2章“控制系统数学模型”完成;倒立摆装置的性能分析用第3章的时域法、第4章的复域法和第5章的频域法均可完成;控制器设计可以利用第6章的校正法实现;设计过程的调试除了理论分析还要利用计算机仿真技术,通过设计与分析学生也体会到了计算机辅助设计的重要性,拓展了MATLAB与LabVIEW的应用。看到师生共同努力设计的系统,学生学到了知识、历练了科研能力;老师传播了知识,收获了希望,提高了工作热情。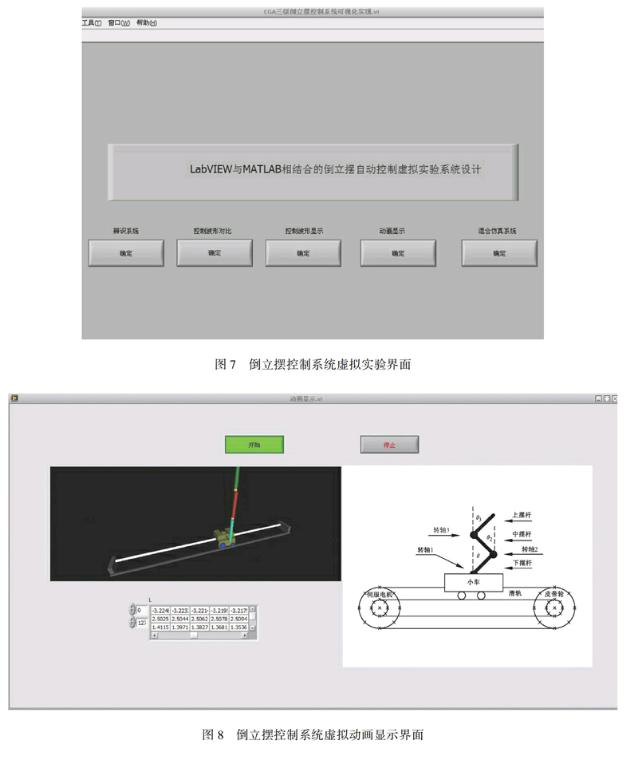
3结束语
在大学教学中引入“教学学术”理念,将专业课的教学过程当做科研任务完成,教师能充分激发其学术进取意识,促进领域前沿知识的自我学习与传播,引领学生学以致用,掌握运用理论解决实际问题的能力;学生可以让其从被动学习转换为主动学习,带着科研任务去学习会很自觉地以解决科学问题为目标去搜集资料、团结合作、学以致用。从高等教育大环境看,这种教学方式的改变,可以解决“教学”与“科研”的矛盾,会充分调动大学教师教学的热情,鉴于教学过程的实用性、趣味性与竞争性,将大学生吸引到大学课堂,缓解了大学生逃课现象,让学生们在充满阳光雨露的课堂汲取知识,为将来贡献社会奠定知识储备,极大地提高学生的学习兴趣、激发学生自主学习的积极性、培养学生的科学探索精神。
学生通过整个学习、探索与设计过程,体验到付出的艰辛与收获的喜悦,教师也在整个过程中体验到教学的快乐,师生间的互动交流也顺其自然在教与学的过程中蔚然成风。
参考文献
[1]郭天石.控制系统的虚拟仪器仿真M:.北京:机械工业出版社,2011:6771.
[2] 曲丽荣,胡容,范寿康.LABVIEW、MATLAB及其混合编程技术M:.北京:机械工业出版社,2011:38.
[3] Hasan G, Lbrahim T, Fikret A. Designing Intelligent Mechanical Ventilator and User Interface Using LabVIEWJ:.Abrabian Journal for Science and Engineering,2014,39([KG-*6]6):48054813.
[4] Zhang Xiuling,Fan Hongmin,Zang Jiayin,Zhao Liang,Hao Shuang.Nonlinear control of triple inverted pendulum based on GAPIDNN J:.Nonlinear Dynamics,2015,79([KG-*6]2):11851194.
猜你喜欢
教育教学论坛(2017年9期)2017-03-20
教育教学论坛(2016年49期)2017-02-27
都市家教·下半月(2016年11期)2016-12-29
电脑知识与技术(2016年26期)2016-11-24
电脑知识与技术(2016年13期)2016-06-29
科技视界(2016年8期)2016-04-05
科技视界(2016年7期)2016-04-01
教学研究(2015年5期)2015-10-26
中学课程辅导·教师通讯(2015年10期)2015-08-07
无线互联科技(2015年3期)2015-04-13
