浅水多波束高帧率测深技术研究∗
2015-10-26 08:07:00鲁东陈宝伟李海森周天
应用声学 2015年4期
鲁东 陈宝伟 李海森† 周天
(1哈尔滨工程大学水声技术重点实验室哈尔滨150001)(2哈尔滨工程大学水声工程学院哈尔滨150001)
浅水多波束高帧率测深技术研究∗
鲁东1,2陈宝伟1,2李海森1,2†周天1,2
(1哈尔滨工程大学水声技术重点实验室哈尔滨150001)(2哈尔滨工程大学水声工程学院哈尔滨150001)
针对常规多波束测量中由于远距离目标信号未到达接收基阵而不能再次发射探测信号,导致测深帧率下降的问题,本文提出了基于Kasami编码的浅水多波束高帧率测深方法。首先讨论了频分复用高帧率测深方法、基于Kasami编码的并行高帧率测深方法和串行高帧率测深方法的原理,然后通过仿真对比了三种方法的条带间干扰和测深分辨力性能,对比结果表明基于Kasami编码的串行高帧率测深方法的条带间干扰较低,具有较高的测深分辨力。最后采用浅水宽覆盖多波束测深系统进行了水池实验验证,结果表明该方法在保证测量分辨力的情况下,可有效的提高测量帧率。
浅水多波束,Kasami编码,高帧率测深
1 引言
在常规浅水多波束测量中,常以单频脉冲为探测信号。为避免相邻两次发射信号的相互干扰,则需等到最远关注区域的回波信号到达基阵后才能发射下一次探测信号。近距离测量时,最远回波到达时间较短,两次测量间隔相对较小,测量帧率较高,在保证海底地形精细测量的前提下,测量船航速可以较高,测量效率较高。而在远距离测量时,最远回波到达时间较长,测量间隔相对较大,测量帧率较低,为获得精细的海底地形,只能以较低航速为代价,导致测量效率降低。多波束测深仪ATLAS FANSWEEP 30 COASTAL[1]采用频分复用多条带技术解决了这一矛盾,同时向不同方向发射多个不同频率的脉冲信号,单次探测即可得到多帧地形。相对常规方法,测量帧率提高了数倍,然而在多波束测深系统中,频带宽度决定距离分辨力,频分复用方法可实现多个窄带信号同步测量换取帧率的提高,但却因频带变窄导致信号脉宽增加,从而降低了测深的距离分辨力。实际应用中对分辨力要求不断提高,促使了多波束测深技术不断发展[2]。在雷达和通信中,为区分频带和时间上交叠的信号,常采用码分复用方式[3],同时随着近些年扩频编码信号在水声领域的广为应用[4],尤其是有着良好自相关特性和互相关特性的Kasami编码信号的应用[5],使得将Kasami编码信号应用到本文解决高帧率高分辨力测深成为可能。本文主要研究基于Kasami编码的浅水多波束高帧率测深技术。
2 多帧测深原理
2.1多条带相控发射技术
常规浅水多波束测深中常以直线阵为模型,设M个响应相同的无指向性阵元组成发射线列阵,发射信号波长为λ,等距排布,阵元间距为d,声速为c。第m号阵元信号相对参考阵元进行相应的时延τm,可使发射信号在θ方向上形成波束,其中每通道时延τm=mdsin(θ)/c[6]。而在如图1的多条带测深模型中,假设产生测深条带个数为L,将相互正交的信号分别束控到不同条带对应角度θl,然后同时或分时发送,可实现多波束的多条带相控发射,则每个阵元的相对延时τm,l=mdsin(θl)/c,其中m=1,

图1 多条带测深示意图Fig.1 A schematic of multiple bands sounding
2.2频分复用多条带测深技术
为产生多个束控到不同条带的正交信号,将每个条带对应不同频率,同时发射测量,其发射和接收原理如图2和图3。发射原理如图2,首先产生L个分别以f1,f2,···,fL为中心频率的脉冲信号,并确保在频带上相互不交叠,然后分别根据各自的条带角度,经过延时束控发射模块产生M通道的时延信号,最后将L组信号按通道号对应叠加,送至发射阵元进行电声转换,即可在空间上形成L个测量条带。接收处理原理如图3,首先通过声电转换,将L路接收信号同时经过f1带通滤波、f2带通滤波、···、和fL带通滤波,然后将各滤波器输出的各路信号分别经过IQ解调、波束形成和检波,即可得到对应条带的测量结果。
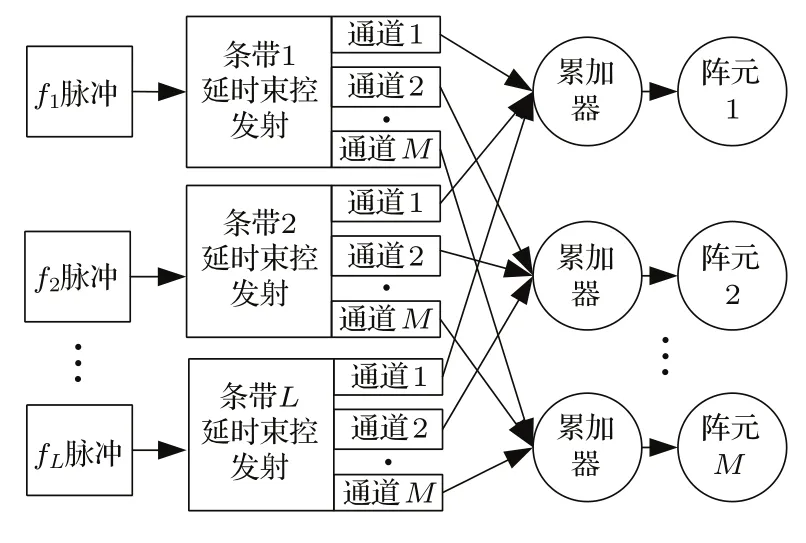
图2 频分复用多条带发射Fig.2 FDM of multiple bands sounding emission
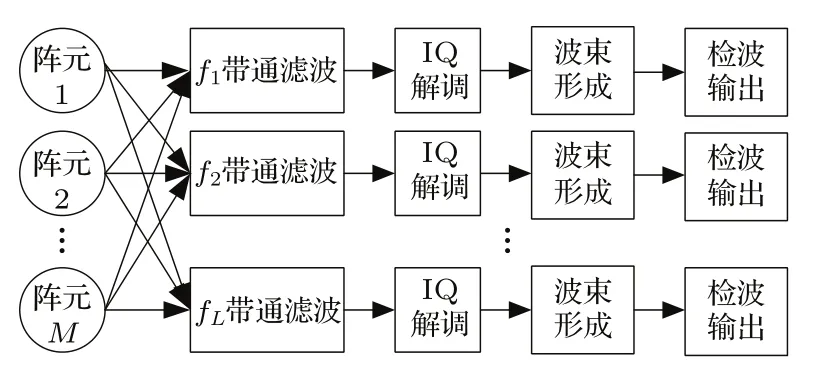
图3 频分复用多条带接收Fig.3 FDM of multiple bands sounding receiving
2.3码分复用多条带并行发射技术
频分复用多条带测量降低了每个条带的信号带宽,而带宽决定距离分辨能力,尤其在常规多波束测深系统带宽资源不够丰富时,条带越多,距离分辨力越差。而码分复用方法在复用信道时不降低信号带宽,从而保证距离分辨力不变。为了抑制条带间信号的干扰,需要选用具有良好相关特性的信号簇,即各条带信号之间互相关和自相关旁瓣值要足够的小。而扩频编码在这方面有着较为优越的性能,前人研究表明Kasami编码[7]具有优越的相关特性,其最大自相关、互相关旁瓣值均接近于Welch[8]理论下限,最大相关值为而常见的GOLD编码信号最大相关值为为编码周期数),足见其优势。因此将Kasami编码信号引入到多条带高帧率测深中,向不同方向同时束控发射不同的Kasami编码信号,可降低各条带间信号的相互干扰,并在保持距离分辨率不变的情况下,同时形成多个测深条带,以达到提高测量效率的目的,图4为其发射原理框图。
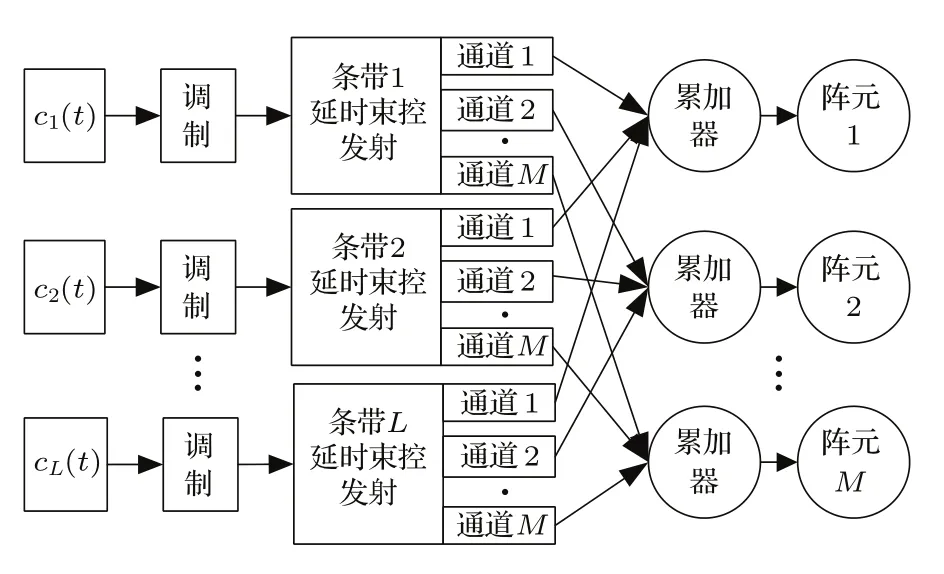
图4 码分复用多条带发射框图Fig.4 CDM of multiple bands sounding receiving
为产生L个条带信号,首先通过Kasami序列生成器产生L组Kasami编码c1(t),c2(t),···,cl(t)并采用PSK调制,然后将调制后的信号经过延时束控发射模块产生不同通道的发射信号,最后将对应通道的信号经过累加器叠加后送到对应的阵元进行电声转换并形成多个测量条带。
2.4码分复用多条带串行发射技术
在码分复用多条带并行发射中,瞬时功率常受到限制,各条带所分到的功率会随着条带数的增加而减少,降低功率意味着信噪比的降低。同时多条带测量时条带间目标距离差别较小,各条带相同垂直航迹向角度的信号回波几乎同时达到,对于时长较长的编码信号而言,该问题尤其严重,而直接导致同一角度的弱信号条带可能被强信号的距离向旁瓣干扰而淹没。针对这一问题,本文考虑将各条带信号串行发送,先发送条带1信号,等待保护间隔,再发射条带2信号,直到条带L的信号发送完毕。由于卷积计算的特性,为尽可能减少条带间信号在同一方向上的干扰,相邻条带回波信号间隔应尽可能大于一段编码的长度。在平海底模型中,外侧条带滞后于内侧条带,发射信号时可考虑先发射内侧条带,再经过一段编码信号的长度发射外侧条带信号,可较好的避免条带间干扰。当然间隔时间越长,条带间干扰越小,但却会导致测量盲区变大,故应尽可能预测海底地形并选择合适的保护间隔。
2.5码分复用多条带接收技术
通过多条带束控发射,各个编码信号在航迹上的不同角度形成测深条带,对于海底这样的多目标对象来说,其回波信号包含了多个方位不同编码的混合信号,接收时需充分利用各个编码信号之间的正交性,对不同角度的信号加以分离,具体原理如图5。首先用本地载波对多个阵元输入信号分别进行IQ解调,得到解析信号。然后由本地产生对应条带的Kasami编码信号与解析信号经过卷积运算,即可分离各条带的信息,最后将不同阵元信号的卷积结果经过波束形成和检波,可得到目标在准确方位上的深度信息。

图5 码分复用多条带接收框图Fig.5 CDM of multiple bands sounding emission
3 仿真实现与结果分析
3.1频分复用多条带发射
在多波束测深仿真研究中,为方便起见,常以平海底为研究模型。设发射阵元数M为56,阵元间距d为5.95 mm,发射信号中心频率为180 kHz,本文以30 m深平海底为目标。按照上述条件在FIELD II[9]中设置发射基阵和目标的参数。设系统带宽为12 kHz,分为四个频点175.5 kHz,178.5 kHz,181.5 kHz和184.5 kHz,分别束控到-9°、-3°、3°和9°方向,由于带宽的限制,这里设置每个脉冲宽度为0.5 ms,将多路信号按图2原理束控发射,并将海底目标反射信号经过对应的带通滤波,可得到不同条带的海底目标强度图如图6所示。抽取-9°条带下的正下方数据,和仅有相控时对比(如图7),由于每个信号为脉冲信号,其能量有一部分会泄漏到其它频带上,可看出频分复用方法在-3°处有一个额外的干扰,此处的干扰即为条带间干扰。当-3°方向存在的目标比-9°方向的目标反射强度大若干倍时,可能产生错误检测,导致错误地形。
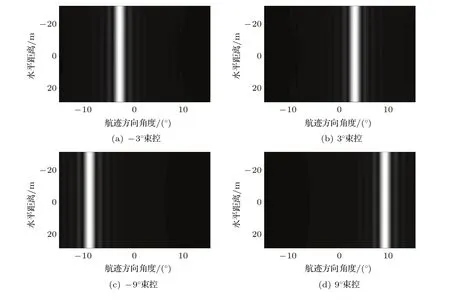
图6 频分复用多条带目标回波强度图Fig.6 Diagram of FDM multi-band target echo intensity

图7 条带干扰对比Fig.7 Interference contrast between bands
为进一步仿真频分复用方法的性能,设置深度、航迹向角度和垂直航迹向角度分别为[30 m,-9°,0°]、[31.5 m,-3°,0°]、[33 m,3°,0°]和[34.5 m,9°,0°]的四个回波强度相同的目标,通过如图3的原理处理可以分别得到如图8,由图8可以看出,波束形成结果基本可以反映每个目标的位置,但由图8也可看出,由于单个信号的脉宽较长,距离向分辨力较差,同时由于条带干扰的存在,可以看到其他航迹向的目标在本航迹向上存在干扰。分别抽取出水平角度为0°的波束图如图9所示。由图9可清楚看到,距离向主瓣较宽,分辨力较差(仅为1 m左右),且由于频谱泄漏,条带间存在相互干扰,尤其是频率上相近的条带。
3.2并行码分复用多条带仿真
频分复用方法尽管可以提高测量效率,但距离向分辨力较差,本文引入Kasami编码来解决这一矛盾。由于小Kasami序列长度的取值仅可为15、63、255、1023和4095等,而对于窄带多波束测深系统而言,当编码长度达到255时,测量盲区太大,而同时考虑较好的相关特性,综合考虑后,本文设置编码长度为63,每个码元宽度为0.08333 ms,中心频率为180 kHz,同时将四个Kasami编码分别束控到-9°、-3°、3°和9°方向,将多路信号按图4原理图束控发射,并对各个目标回波进行码卷积,仿真并抽取-9°情况下的正下方数据对比如图10,由于编码信号之间的互相关特性并不理想,其他条带的信号会干扰到本条带,可看出频分复用方法在-3°、3°和9°方向都有一个额外的干扰,此处的干扰即为条带间干扰。那么当其他方向存在的目标比-9°方向的目标反射强度大数倍时,可能产生错误检测,导致错误地形。
进一步仿真码分复用方法的性能,和频分复用设置同样仿真条件,分别抽取出水平角度为0°的波束图,如图11所示。和图9对比可以清晰看出,码分复用方法在距离向分辨力上有明显的优势,分辨力较高(约为0.1 m),明显高于频分复用法。但由于编码较短,互相关特性较差,导致条带间干扰比较大,当其他条带信号回波强度较大时,本条带信号将会被淹没,无法正确检测地形。
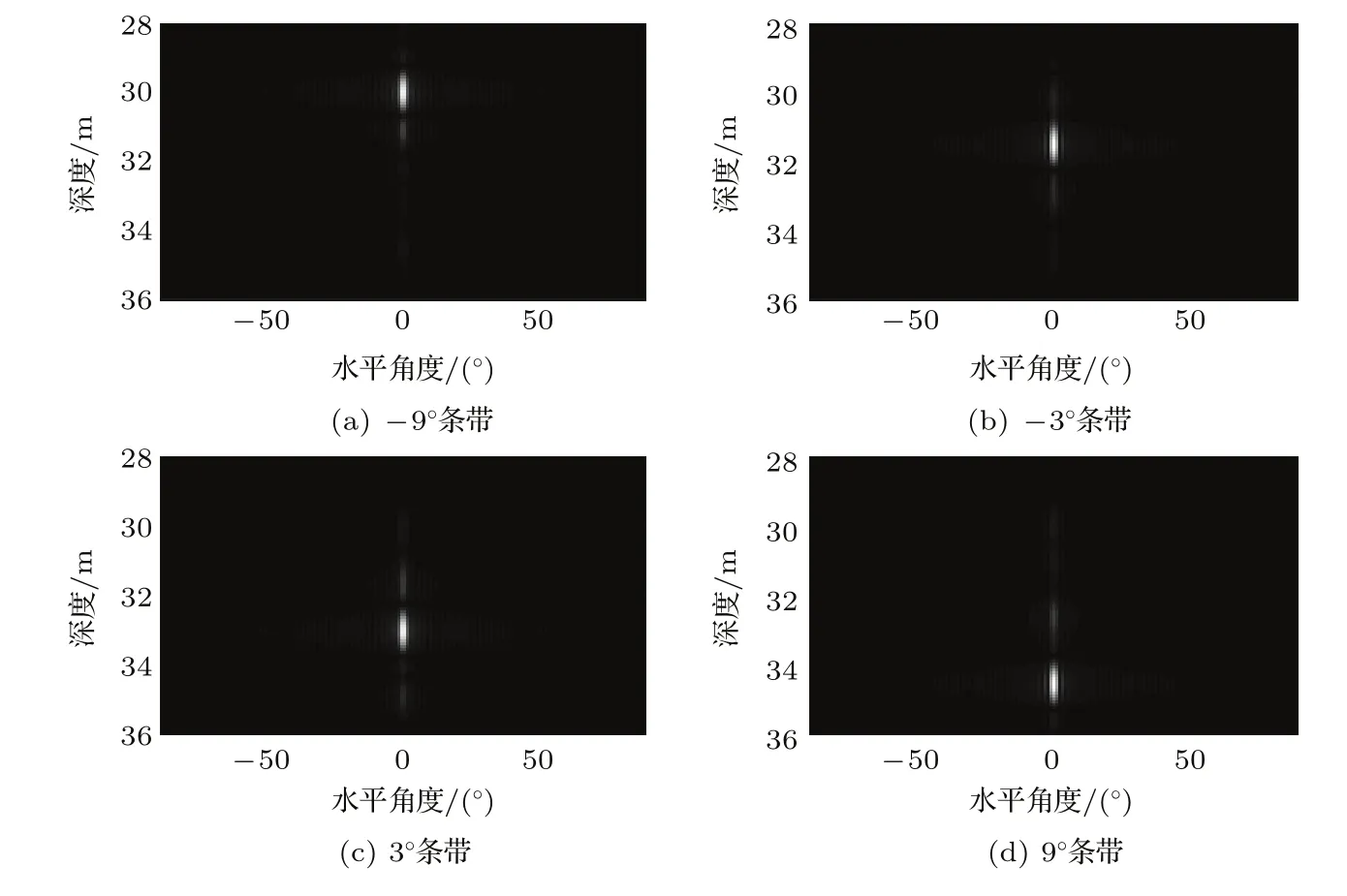
图8 频分复用多条带波束图Fig.8 Beam pattern of FDM multi-band
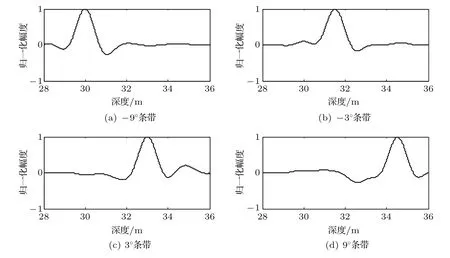
图9 正下方目标深度图Fig.9 Target depth map of vertically downward
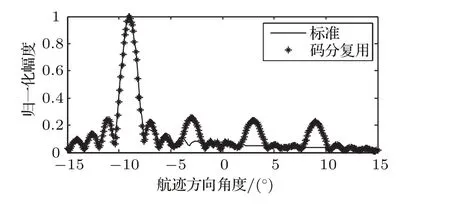
图10 条带干扰对比Fig.10 Interference contrast between bands
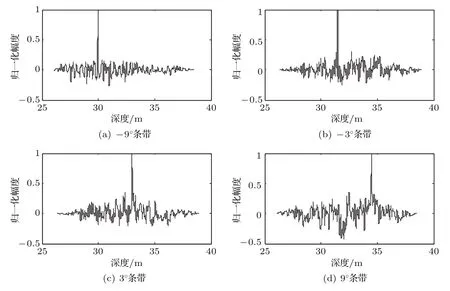
图11 正下方目标深度图Fig.11 Target depth map of vertically downward
3.3串行码分复用多条带仿真
针对码分复用方法的条带间干扰较大的问题,本文将编码信号串行发送,并在编码与编码之间插入间隔,让不同条带相同方向的回波串行回到接收基阵。由于各条带回波相互不叠加,可以利用局部背景归一化法将反射强度较小的条带信号提取出来。将4组码分别按20 dB、10 dB、0 dB、30 dB衰减串行接收,中间插入间隔为单组编码的长度,然后以最大衰减的码为目标加以卷积求目标,可以得到如图12(a),由图12(a)可看出在常规的幅度检测法中,基本无法判定目标的准确位置。本文先提取一个编码长度范围内的背景电平,然后以此作为每个点的归一化参考,经过处理可得到如图12(b),由图12(b)可看出,采用常规方法即可提取出目标的方位来。
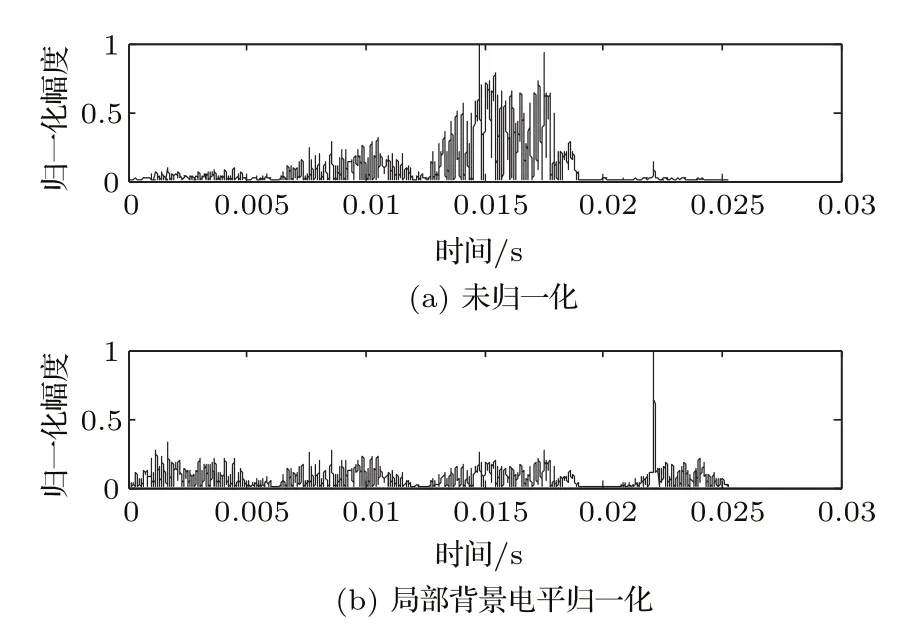
图12 背景归一化对比图Fig.12Comparisonchartofbackground normalization
为充分验证串行码分复用多条带测深方法,以30 m平海底为目标,在垂直航迹向从-30 m到30 m、航迹向角度从-15°到15°范围内由FIELD II仿真可得到波束图如图13。由图13可以看出-3°、3°、-9°和9°条带均有明显的代表地形信息的细的亮条带,抽取中间波束进行分辨力验证,证实其分辨力和并行码分复用方法一致。当然,串行发射的测量时间变长,测深盲区变大,相对并行发射来说,测量效率有所降低(50 m水深,6倍覆盖时会降低7.7%),但相对并行发射的单条带瞬时功率低,条带间干扰几率大的缺点,其导致的效率降低是微不足道的。
4 水池试验验证
为充分验证本文方法的有效性,在哈尔滨工程大学信道水池(长45 m,宽6 m,深5 m),以如图14(a)的浅水宽覆盖多波束测深系统的右侧基阵为实验设备,并置于水池行车上。将基阵置于水下3 m,阵面斜对池壁(把池壁当作海底),接收阵平行于水面,相对水池的位置示意图如图14(b),其中基阵离池壁距离OA约为4.2 m,基阵中心位于正前方目标距离OB约为8.4 m、水池拐角处目标距离OC约为17.5 m,基阵相对池壁偏转角∠AOC约为60°。
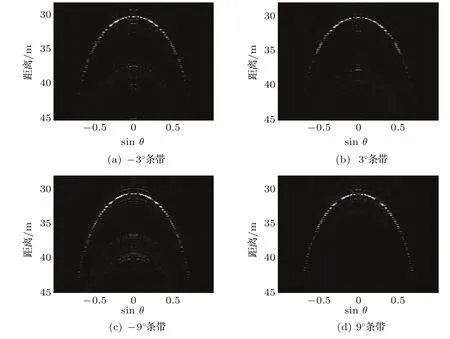
图13 串行码分复用多条带波束图Fig.13 Beam pattern of serial CDM multi-band
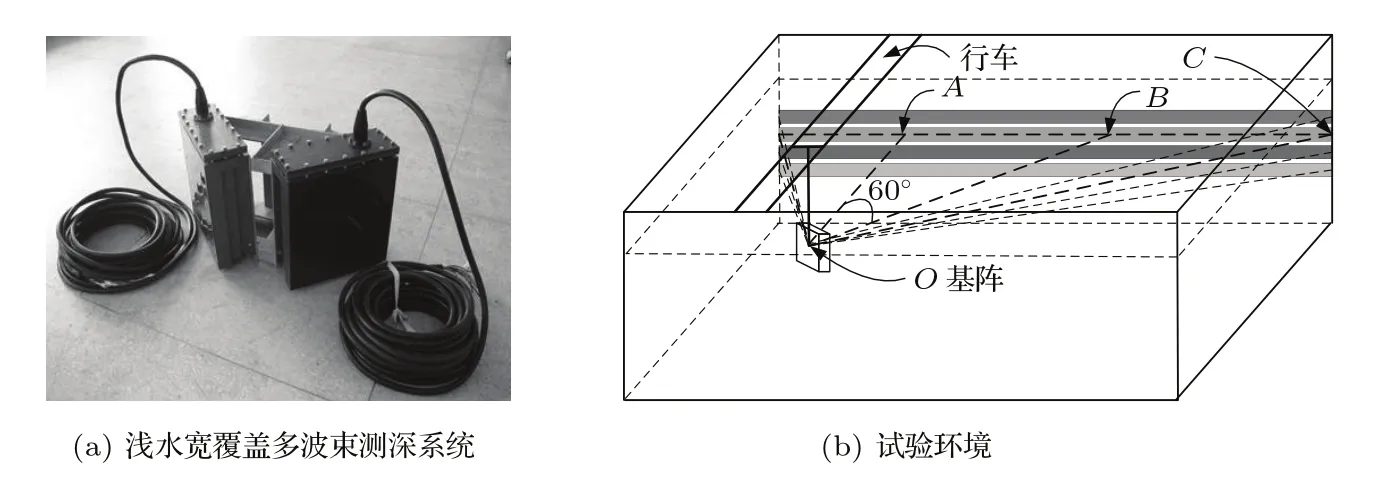
图14 试验设备和环境Fig.14 Test equipment and environment
水池试验通过发射基阵串行发射4个条带信号,其中每个码元长度为50µs,条带间信号间隔为3.2 ms。接收信号经过如图5的IQ解调、编码卷积和波束形成等步骤得到波束图,并取出第二个条带的信号如图15(a),并采取常规的检波方法,检波结果如图15(b)中星号标记,为和环境对应,将检波结果转换到直角坐标系如图16。对图15,图16中所示结果分析如下:
(1)图15(a)中,在采样点960点附近,存在一条亮线。原因是边发边收时接收到发射阵的直达波,经编码卷积后,就出现了一条亮线。
(2)图15(b)中,由检波结果(白色星号)可看出,从采样点号1800点,波束号为0处向右下方逐渐延伸出一条亮线,它即是第二个条带处理后的地形信息。但在采样点号2850点,波束号为145附近也有几个错误检波点,这是由于当前条带目标回波信号太弱导致的(当然如果考虑地形信息,可以有效的规避这几个点)。
(3)图15(b)中,波束号在640以后,检波结果明显变差,这是由于越到后面,水池壁的掠射角度越来越小,反向散射强度急剧下降,因而无法检测到有效的信号。
(4)图15(a)中,在采样点号4388点,波束号为786的白色矩形方框处有一个亮点,该亮点是水池的拐角处,对应图14中的C点,混响强度较大,明显高于其附近的回波信号,由检波结果可以看出受隧道效应[10]的影响,相邻波束都检测到了相同的采样点号,导致出现假地形,由于篇幅所限,这个问题在本文中不展开讨论。
(5)图16中所示的OB、OC处的检测结果,其距离和图14(b)中示意图大致对应,为验证分辨力,抽取B点所在的中间波束,分析其距离向-3 dB宽度为61.07µs(0.0916 m)和理论仿真一致,而在同样试验环境下的常规单频脉冲测深方法(脉宽为50µs)中同一位置处的距离向-3 dB宽度为59.48µs,两种方法的分辨率相差较小,而由图15可看出本文方法具备同时测量四个条带的能力,和仿真结果保持一致,有效的提高了测深效率,由此可证明本方法的有效性。
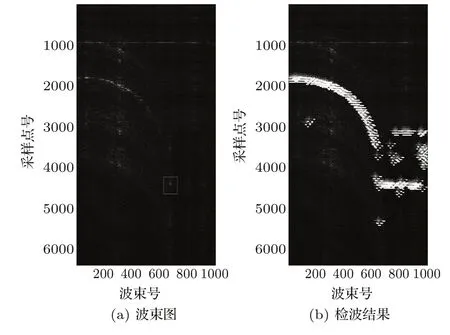
图15 水池试验结果Fig.15 Tank test results
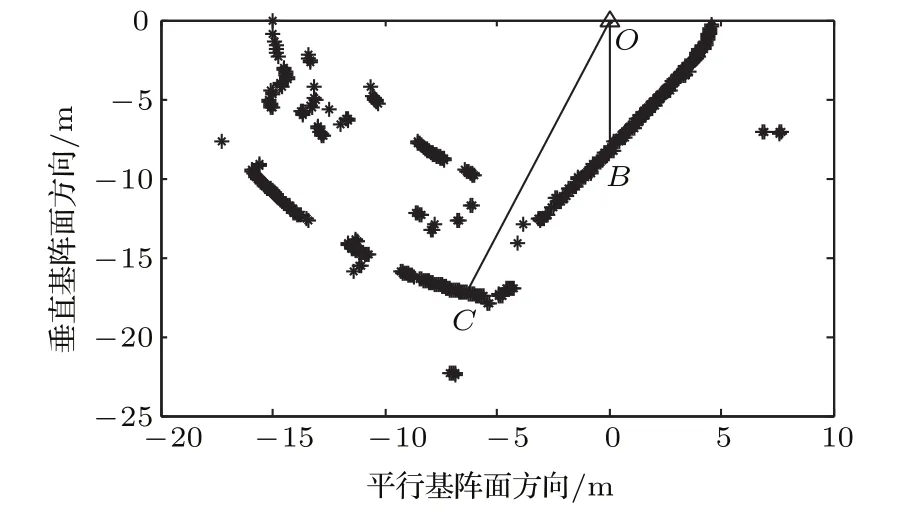
图16 检波结果Fig.16 Detection results
5 结论
本文研究了浅水多波束高帧率测深技术,并得到以下结论:
(1)频分复用高帧率测深技术是将不同频率的信号束控到不同的航迹方向上,同时测量多个条带对应的深度,这样虽然降低了单个条带的有效带宽,降低了测深分辨率,但是可提高测量效率。
(2)并行码分复用方法是将不同编码的信号束控到不同的航迹方向上,同时测量不同码址对应条带的深度,该方法不仅提高了测量效率,同时也保证了测深分辨率,但由于编码信号的距离向旁瓣较高,容易淹没同一角度的不同条带的弱信号。
(3)串行发射各条带编码信号方法,相对频分复用方法提高了距离分辨力,而相对并行码分复用方法则降低了条带间的干扰,尽管有些许效率的降低,但却有效地提高了各条带的测深质量。
(4)由于采用了编码信号,增加了系统发射和接收的复杂度,因而整个系统的实现成本有所提高,但对于高效率高分辨力测深需求而言,本文方法给出了在系统性能与成本之间进行优化、折衷的一种选择方案。
[1]KÖNNECKE S.The new atlas fansweep 30 coastal:A tool for efficient and reliable hydrographic survey[C]. 25th International Conference on Offshore Mechanics and Arctic Engineering,OMAE2006-92242:257-261.
[2]李海森,周天,徐超.多波束测深声纳技术研究新进展[J].声学技术,2013,32(2):73-80. LI Haisen,ZHOU Tian,XU Chao.New developments on the technology of multi-beam bathymetric sonar[J].Technical Acoustics,2013,32(2):73-80.
[3]HAO H,STOICA P,JIAN L.Designing unimodular sequencesetswithgoodcorrelations-includingan application to MIMO radar[J].Signal Processing,IEEE Transactions on,2009,57(11):4391-4405.
[4]周锋.水声扩频通信关键技术研究[D].哈尔滨:哈尔滨工程大学,2012.
[5]于洋,周锋,乔钢.小Kasami序列的正交码元移位键控扩频水声通信[J].哈尔滨工程大学学报,2014,35(1):81-86. YU Yang,ZHOU Feng,QIAO Gang.Quadrature code shift keying spread spectrum underwater acoustic communications employing small Kasami sequence[J].Journal of Harbin Engineering University,2014,35(1):81-86.
[6]田坦.声纳技术(第二版)[M].哈尔滨:哈尔滨工程大学出版社,2010:202.
[7]LAHTONEN J.On the odd and the aperiodic correlation properties of the Kasami sequences[J].Information Theory,IEEE Transactions on,1995,41(5):1506-1508.
[8]WELCH L.Lower bounds on the maximum cross correlation of signals(Corresp.)[J].IEEE Transactions on Information Theory,1974,20(3):397-399.
[9]JENSEN J A.Field:a program for simulating ultrasound systems[J].Medical and Biological Engineering and Computing,1996,34(S1):351-353.
[10]魏玉阔,陈宝伟,李海森.利用MVDR算法削弱多波束测深声纳的隧道效应[J].海洋测绘,2011,31(1):28-31. WEI Yukuo,CHEN Baowei,LI Haisen.Tunnel effect elimination in multibeam bathymetry sonar based on MVDR algorithm[J].Hydrographic Surveying and Charting,2011,31(1):28-31.
Technology of the multi-beam high frame rate bathymetry in shallow water
LU Dong1,2CHEN Baowei1,2LI Haisen1,2ZHOU Tian1,2
(1 Acoustic Science and Technology Laboratory,Harbin Engineering University,Harbin 150001,China)(2 College of Underwater Acoustic Engineering,Harbin Engineering University,Harbin 150001,China)
Because probe signals can't be re-launched before remote target signals reach receiving array in the conventional multi-beam measurement,which results in the problems of decrease of bathymetry frame rate,the method of multi-beam high frame rate in shallow water is proposed on the basis of Kasami encoding.Firstly,it analyzes the FDM high frame rate bathymetry method,and the method of parallel high frame rate bathymetry based on Kasami encoding as well as the theory of serial high rate bathymetry.Subsequently,according to simulation,inter-band disturbance and performance of bathymetry resolution are compared among these three methods.Final analysis shows that serial high rate bathymetry method on the basis of Kasami encoding possesses lower inter-band disturbance capability and higher bathymetry resolution.Finally,simulation and tank experimental verification are finished based on the MBES(Multi-beam echo sounder).The result shows the method can effectively increase measurement frame rate while guaranteeing measurement resolution.
Shallow water multi-beam,Kasami code,High frame rate bathymetry
TB51+6
A
1000-310X(2015)04-0303-08
10.11684/j.issn.1000-310X.2015.04.004
2014-09-19收稿;2015-01-28定稿
∗国家863计划资助项目(2007AA09Z124,2008AA092701),国家科技部国际合作计划资助项目(2008DFR70320),国家自然科学基金项目(41006057,41076056,60872107),中国高等学校博士点基金项目(20102304120028,20112304130003,20122304120012),水声技术重点实验室基金项目(9140C200105120C20001)
鲁东(1986-),男,重庆丰都人,博士研究生,研究方向:通信与信息系统。
E-mail:hsenli@126.com
猜你喜欢
电工技术学报(2023年16期)2023-08-30 02:44:30
红外技术(2022年4期)2022-04-25 08:47:36
系统工程与电子技术(2016年2期)2016-04-16 05:16:53
中国学术期刊文摘(2016年2期)2016-02-13 16:01:41
医疗卫生装备(2015年9期)2015-12-27 03:08:41
中国光学(2015年5期)2015-12-09 09:00:44
计算机工程(2015年4期)2015-07-05 08:28:12
中国光学(2015年1期)2015-06-06 18:30:20
电子设计工程(2015年8期)2015-02-27 12:05:35
海岸工程(2014年4期)2014-02-27 12:51:28