基于数学建模原理平行泊车的动力学模型
2015-10-25 09:44张明会
湖南科技学院学报 2015年5期
张明会
(陇南师范等等专科学校 数信学院,甘肃 成县 742500)
基于数学建模原理平行泊车的动力学模型
张明会
(陇南师范等等专科学校 数信学院,甘肃 成县 742500)
动力学模型;微分方程;基解矩阵;特征根;牛顿运动定律
1 问题的提出
随着当今社会经济的快速发展,人民生活水平的不断提高,城市商业的日益繁荣,交通运输业也面临着巨大的挑战,物质的大范围转移需要大量的运输工具,但考虑到更加经济,更加实惠的因素,从而制造出了各种类型的大型车辆,例如,铰接式集装箱货车等,来缓解交通运输业的压力,虽然铰接式集装箱货车在物质流通方面取得了重大成果,但由于它的体积比较庞大,车头和拖挂的集装箱拖车之间有可活动连接部,所以整车在转弯时不是刚性的,对于这样的车辆在驾驶过程中,驾驶员必须要有丰富的驾驶经验,过硬的驾驶技术和良好的心理素质,这无疑给驾驶员的驾驶体验带来了巨大的挑战,尤其是在狭窄空间中停车的问题。如何才能将一辆铰接式集装箱货车在保证安全的情况下顺利的停入侧向车位。
2 必要的假设与变量说明
2.1必要的假设
为了便于讨论,现做如下假设:
(1)假设汽车是一个矩形;并以其中心为参考点;
(2)假设汽车在行驶过程中的速率恒定,且为V0;
(3)假设在转弯过程中,汽车的方向盘保持在某一角度θ不变;
(4)汽车的牵引力T的大小保持不变。
2.2变量说明
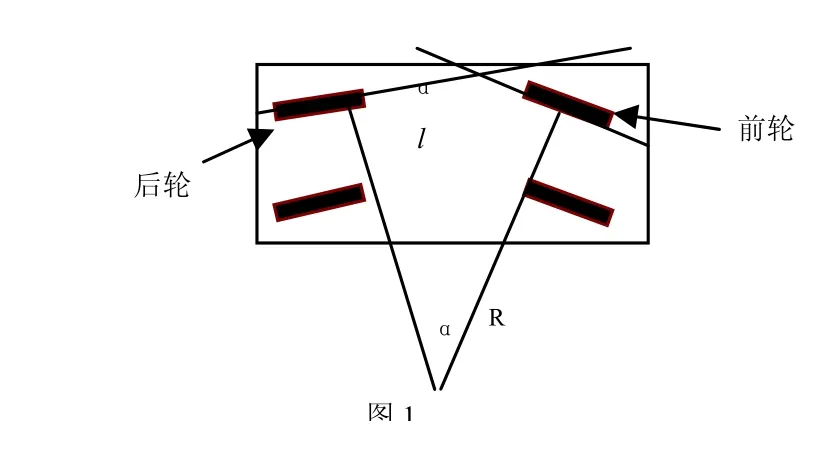
(1)汽车转弯过程中,所行驶的曲线的曲率半径为R;
(2)汽车前后轮之间的距离为l;

(4)以车位的中心为坐标原点建立坐标系;设汽车的中心坐标为
3 模型的建立
3.1小型车转弯的动力学模型
在第一阶段的几何模型中,我们没有考虑汽车的运动状态,而只考虑了在理想状态下的行车路线我们称之为静态泊车路线,如果考虑到汽车的运动状态,其行车的路线我们称之为动态泊车路线。
(1)在起点A(x0,y0)处,速度方向为切线方向,且与Y轴平行;
(2)在终点C处,切线也与Y轴平行;
(4)在拐点B的切线与X轴平行。
动态的泊车路线,虽然与静态不同,但动态路线的曲线G与G1有相似的形状和性质。
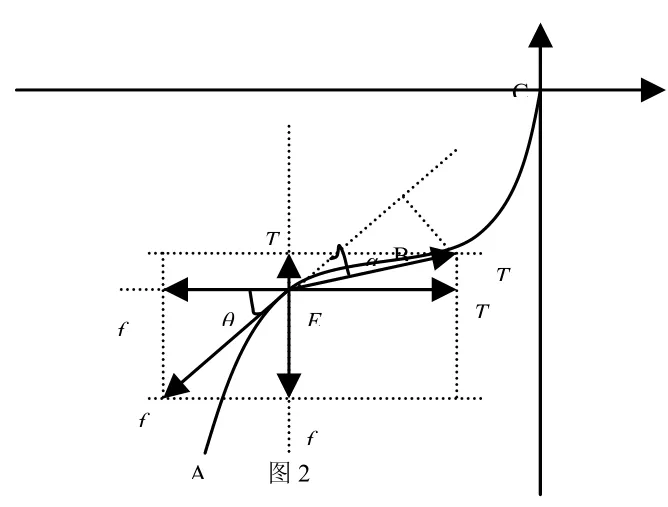
其中,f为阻力,且方向与E点的切线方向一致,T为牵引力,T与f的夹角为转向角α;则




4 问题的解答与数据检验

5 模型的评价与改进
通过我们建立的动力学模型,最终得到转弯汽车的运动轨迹方程,通过方程,分析了铰接式集装箱货车能否平行泊车的判断标准及小型车辆在平行泊车过程中调整车位的方法。对汽车司机在泊车过程中具有一定的指导意义和参考价值。
事实上,在泊车过程中,汽车的速率并不能保持恒定,而是有微小的变化,此时的轨迹方程应作适当的改变;方向盘的角度也可能并没有保持固定的夹角,而是左右调整,也会影响轨迹方程的形状;另外,在泊车过程中,需要躲避行人、临时障碍等都会使汽车的运行状态发生改变,从而轨迹方程也需要修正等等。考虑到这些因素,在实际泊车过程中要根据不同的情况灵活处理,诸如加速、减速、左右打方向等,不要拘泥于以上数值。
[1]王高雄,等.常微分方程[M].北京:高等教育出版社,1983.
[2]刘玉琏.数学分析讲义[M].北京:高等教育出版社,2006.
[3]周义仓,赫孝良.数学建模实验[M].西安:西安交通大学出版社,2005.
[4]阮晓青,周义仓.数学建模引论[M].北京:高等教育出版社,2005.
[5]汽车之家.http://www.autohome.com.cn.2010-5-22.
(责任编校:何俊华)

O19
A
1673-2219(2015)05-0016-05
2015-01-20
张明会(1981-),男,硕士,甘肃康县人,现为陇南师范高等专科学校数信学院讲师,研究方向为基础数学。
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
新高考·高一数学(2022年3期)2022-04-28
汽车实用技术(2022年7期)2022-04-20
思维与智慧·上半月(2022年4期)2022-04-08
小哥白尼(神奇星球)(2021年4期)2021-07-22
数学小灵通·3-4年级(2020年11期)2020-12-14
数学小灵通·3-4年级(2020年3期)2020-06-24
军民两用技术与产品(2020年3期)2020-04-07
小学生导刊(2017年31期)2017-08-15
小学生导刊(低年级)(2016年8期)2016-09-24