一种基于自适应阈值的运动目标检测方法
2015-10-25 09:44张淑军
湖南科技学院学报 2015年5期
张淑军
(湖南科技学院 图书馆,湖南 永州 425199)
一种基于自适应阈值的运动目标检测方法
张淑军
(湖南科技学院 图书馆,湖南 永州 425199)
针对视频监控系统,论文提出了一种基于自适应阈值的运动目标检测方法。通过帧间差分与背景差分相结合来检测运动目标。差分图像二值化时,利用自适应阈值算法来得到最佳阈值。实验结果表明该方法具有很好的实时性、有效性和鲁棒性。
背景差分;自适应阈值;视频监控
1 引 言
图像序列中运动目标的检测是计算机视觉应用领域中的一个重要方面,如视觉监控系统、智能交通系统和飞机场安全系统等[1~6]。为了更好地进行视频监控,需要有效的运动目标检测算法。通常情况下,由于检测区域内存在背景干扰,感兴趣的目标相对较小而且纹理较差,外界光照条件的迅速变化等诸多因素给目标检测带来很大的困难[7]。因此,通常的检测算法已经无法满足实时监控系统的要求。本文以车辆检测[8~9]为例,提出了一种自适应阈值算法,有效地提高了差分图像二值化的质量,并结合帧间差分和背景差分来检测运动目标。实验结果表明该方法能有效地检测运动目标。
2 运动检测
由于运动目标的移动使得对应位置上的亮度发生变化,所以我们可以通过亮度变化在时间序列上和在空间上定位运动目标。帧间差分对噪声抑制较好一些,而背景差分则对运动目标的轮廓检测效果较准确,因此,本文将二者结合用来检测运动目标。另外,我们通过自适应阈值算法来确定二值化时的最佳阈值。图1给出了运动目标检测的流程。
2.1运动目标检测
首先采集预先定义的背景图像B,且该背景图像中不含有运动目标。然后对视频中的相邻两帧相邻的灰度图像这样利用当前帧分别对背景图像及相邻帧图像进行差分,得到背景差分图像Db和帧间差分图像Dt,计算如下式

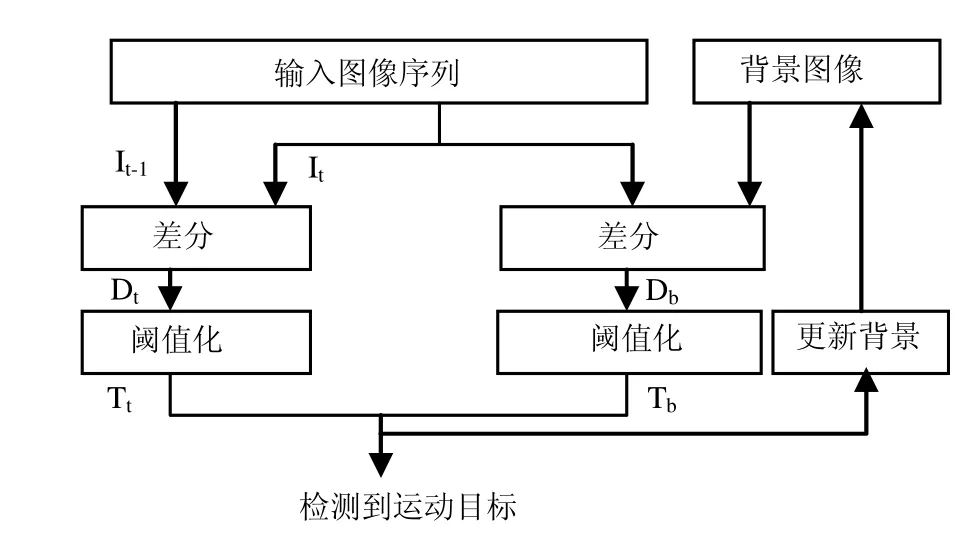
图1 运动目标检测流程图
对背景差分图像Db和帧间差分图像Dt分别进行阈值化处理,可得到二值图像Tt和Tb,计算如下

其中阈值tt和tb采用2.1节中的自适应方法确定。这样,利用二值图像Tt和Tb经过简单的与运算就可以得到运动目标区域Mk,即

最后通过运动目标区域Mk可以计算出背景更新图像B¢,如下式

式中a为更新系数,取值范围为[0,1]。
2.2自适应阈值
本方法基于直方图对差分图像进行阈值化[10],并能有效地去除光照变化带来的影响。我们假设差分得到的灰度图像直方图是由三个附加高斯噪声相加得到。差分值的混合概率密度函数是:


其中
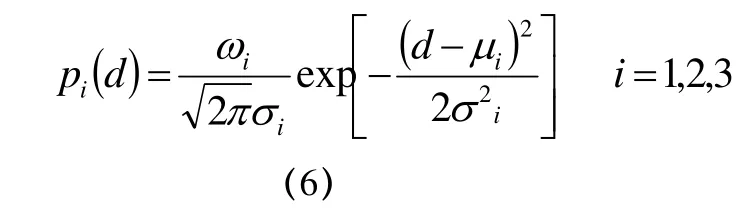
其中iw,im和is分别为数量比例、均值和方差。于是,求取差分图像进行阈值化的最佳阈值就可以由把三个附加高斯噪声模型分离的两个最佳阈值1q和2q来决定。其中阈值
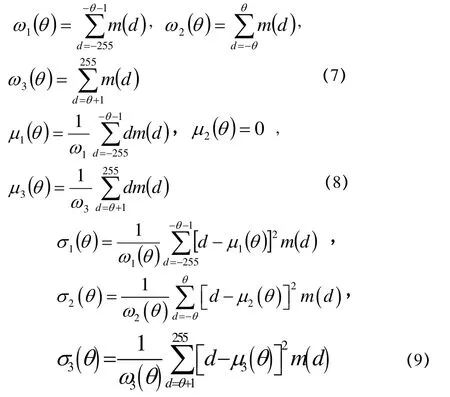

式中为对应灰度值的概率,计算如下上式中,n为图像中像素点的总点数,是计算像素点数的函数。于是可以通过下式中的平方误差计算函数来判定阈值q,即

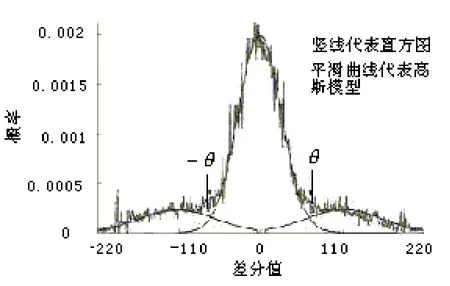
图2 高斯模型与直方图概率分布关系
3 实验结果
从固定视角,我们摄取复杂路面上一系列图像作为实验样本。图像序列中包含多个运动目标,并含有一定的噪声和阴影。每秒钟采集8帧图像,图像大小为240´320。
自适应阈值实验结果如图3。图3(a)为差分图像,图3(b)是利用自适应阈值算法得到的实验结果,可以看出当灰度值取20时,误差平方值最小,所以20就是最佳阈值。

图3 自适应阈值实验结果
图4为运动目标检测结果。图4(a)是背景图像,利用背景更新算法,背景图像会不断地更新以符合实际背景,实验证明本文所提的背景更新算法有很好的可靠性;图4(b)和图4(c)分别为前一幅图像和当前图像;利用自适应阈值算法,得到最佳阈值为31时的背景差分图像图4(d)和最佳阈值为20时的帧间差分图像图4(e);图4(f)是运动目标检测结果。

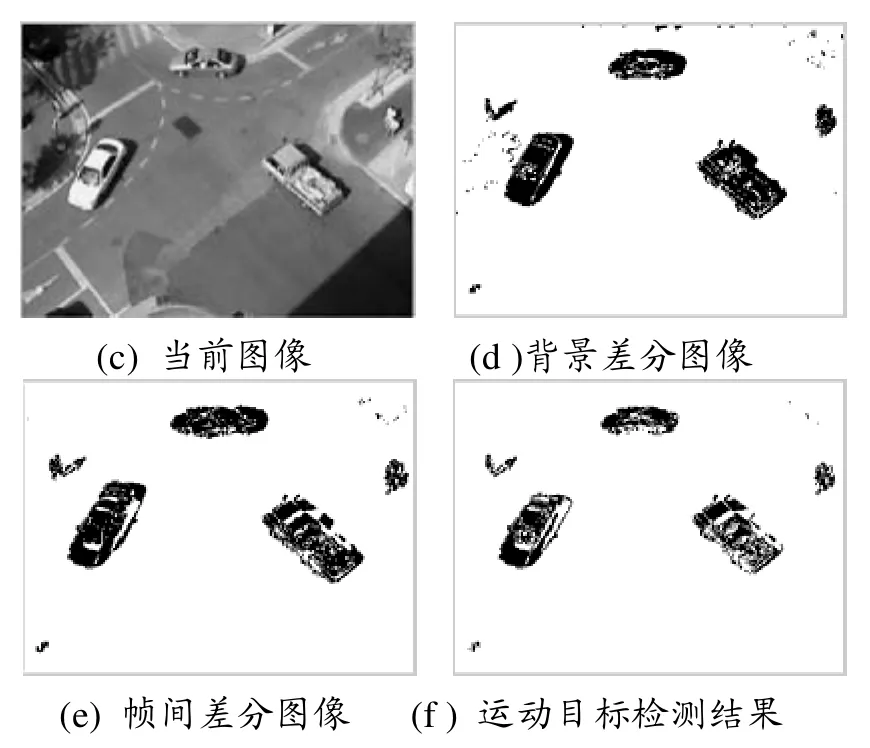
图4 运动目标检测的实验结果
4 结束语
针对视频监控系统,本文提出了一种基于自适应阈值的运动目标检测方法。自适应阈值算法基于差分图像的灰度信息求取最佳阈值。利用得到的最佳阈值对差分图像进行二值化,并将帧间差分二值化图像和背景差分二值化图像相与来检测运动目标。实验结果表明该方法具有很好的实时性和鲁棒性。
[1]姜柯,李艾华,苏延召.双重自适应码本模型在运动目标检测中的应用[J].计算机辅助设计与图形学学报,2013,25 (1): 67-73.
[2]Sun H, Feng T, Tan T. Robust extraction of moving objects from image sequences[C]. Proc. the Fourth Asian Conference on Computer Vision, Taiwan,2000: 961-964.
[3]贾茜,谢勤岚,董蓓.基于TMS320DM642的实时运动目标检测与跟踪系统[J].计算机测量与控制,2009,17(3):469-471.
[4]Viola P, Jones M. Robust real time object detection[J]. International Journal of Computer Vision, 2002,57(2): 137-154.
[5]Viola P, Jones M. Rapid object detection using a boosted cascade of simple features[C]. Proceedings of IEEE Conference Computer Vision and Pattern Recognition, Kauai, Hawaii,USA ,2001:511-518.
[6]Wei Zhiqiang, Ji Xiaopeng, Wang Peng. Real-time moving object detection for video monitoring systems [J].Journal of Systems Engineering and Electronics,2006, 17(4):731-736.
[7]侯明正,冯子亮,刘艳丽,等.光照变动条件下基于图切割算法的运动目标跟踪[J].光电子·激光,2012,23(5):986-992.
[8]Bedenas J,Boder M, Pla F.Segmenting traffic scenes from grey level and motion information[J].Pattern Analysis & Applications,2001,4(1):28-38.
[9]蒋刚毅,郁梅,叶锡恩,等.一种基于视觉的车辆跟踪及交通流量参数估计新方法[J].电路与系统学报,2001,(12): 69-73.
[10]Nariman H,Alireza M,Neil B.Automatic Thresholding for Change Detection in Digital Video[C].Proc.SPIE 4067, Visual Communications and Image Processing 2000:133-142.
(责任编校:何俊华)
TP181
A
1673-2219(2015)05-0116-03
2014-12-19
张淑军(1980-),女,湖南永州人,本科,助理馆员,研究领域为图书管理和计算机应用。
猜你喜欢
数学杂志(2022年5期)2022-12-02
北京航空航天大学学报(2022年6期)2022-07-02
汽车工程师(2021年12期)2022-01-17
新世纪智能(数学备考)(2021年5期)2021-07-28
天津医科大学学报(2021年1期)2021-01-26
当代陕西(2020年14期)2021-01-08
自动化学报(2017年5期)2017-05-14
贵州师范学院学报(2016年4期)2016-12-01
光学精密工程(2016年1期)2016-11-07
信息安全研究(2015年3期)2015-02-28