
微型水声信号采集存储系统设计与实现
2015-10-25 05:51郝东旭
水下无人系统学报 2015年5期
尚 凡,郝东旭
(1. 中国人民解放军91388部队,广东 湛江,524022; 2. 中国人民解放军92840部队,山东 青岛,266405)
微型水声信号采集存储系统设计与实现
尚凡1,郝东旭2
(1. 中国人民解放军91388部队,广东 湛江,524022; 2. 中国人民解放军92840部队,山东 青岛,266405)
为解决试验中水声信息无法被高保真、长时间采集存储等问题,设计了一种基于ARM微控制器和大容量通用储存卡的微型水声信号采集与存储系统,设计中将高集成度模拟、数字芯片技术有机结合,该采集系统硬件具有体积小巧(3×8 cm)、低功耗、参数设置灵活等优点,方便嵌入各型小空间水声设备内部; 软件设计采用“直接存储器访问(DMA)+乒乓缓冲区”的采集模式,确保微控制器轻载实现信号无间断、无丢点采集存储,保证系统连续长时间工作稳定可靠。水下环境噪声测量试验验证了该系统的合理性和工作可靠性。
水声信号采集与存储; 低功耗; 直接存储器访问(DMA); 乒乓缓冲区
0 引言
水下武器平台(如潜艇、UUV等)与各型水下武器(鱼雷、诱饵等)在不同工况下的辐射水声信号是进行水声对抗策略设计、算法研究的基础数据信息。为解决试验进程中各型被试平台及武器系统辐射水声信息无法被高保真长时间离线采集存储等问题,设计了基于ARM(advanced RISC machines)微控制器与大容量通用储存卡的微型水声信号采集存储系统,实现了长时间实时采集、处理并储存水下目标水声辐射信号等功能。同时,由于大量采用高集成度模拟及数字芯片技术,该采集系统具有体积小、功耗低、噪声低、连续存储时间长及工作稳定可靠等特点,可方便嵌入各种小空间水声设备内部。目前,该系统的合理性和工作可靠性已在某海洋水下噪声测量试验中得到很好验证。
1 系统总体方案设计
文中设计的系统总体框图如图1所示,由模拟信号调理电路、A/D转换单元、ARM微控制器单元、TF存储卡(Trans-flash Card)数据存储单元[1]、RS422串行通信总线等多部分组成。模拟信号调理电路负责接收水声换能器压电信号,经低噪声高输入阻抗前置放大、程控放大滤波器和单端转差分电路后,将水听器输出的微弱信号放大为适合A/D转换的电压信号进行模数转换。

图1 采集系统总体框图Fig. 1 Block diagram of acquisition system
ARM微控制器作为采集系统控制与管理核心,主要完成模拟数字转换器(analog to digital converter,ADC)数据请求读取、采样数据乒乓块缓冲、数据时间戳生成插装、数据TF存储卡写入存储、模拟电路电源控制、模拟滤波放大参数控制以及人机接口与上位机通信等功能。考虑到微控制器RAM较小,为保证TF存储卡数据写入带宽稳定,该系统放弃了较复杂的FAT文件系统,而是重新设计了一种适合采集系统使用的极简文件系统,确保系统采集存储时能够连续读写TF存储卡扇区,而不需进行频繁查找空闲数据块操作。数据采集完成后,PC机可读取TF数据卡中的数据并进行本地保存及事后分析等操作。采集系统内部集成RS422总线与PC机上位机的通信,可完成参数设置、手动采集启停、任务采集(见
3.1节)添加删除等各种功能。
该采集系统应具备以下功能[2-3]:
1)压电水听器信号程控放大滤波,增益软件可调,低通滤波截止频率软件可调;
2)长时间、无丢点的模拟信号采集存储功能,采集数据以固定大小数据块存储至TF存储卡,数据携带时间标签信息方便读取分析;
3)采样频率、采样启停时间、滤波器增益及截止频率均软件可控,并以采集任务的方式灵活组合使用;
4)系统采集运行功耗小于200 mW,待机功耗小于80 mW配合大容量锂电池可用于长时间离线工作。
2 系统硬件设计
2.1模拟信号调理单元硬件设计
模拟信号调理单元完成水听器输出信号阻抗匹配、放大、抗混的滤波及ADC采集电路匹配等功能。其主要由高阻抗前置放大电路、程控滤波放大电路、单端转差分信号放大电路3部分组成。电路原理图如图2所示。

图2 模拟信号调理电路Fig. 2 Conditioning circuit of analog signal
水听器作为典型的压电型传感器具有很高输出阻抗,为满足信号完整性要求需设计超高输入阻抗前置放大电路与之阻抗匹配,电路中运放U11A,U11B,U12B完成水听器匹配放大工作。为确保电路阻抗及噪声性能满足设计要求,采用如下措施:
1)U11,U12采用CMOS(complementary met-al oxide semiconductor)工艺输入级低噪声运放,具有极小的输入偏置电流,采用高阻值偏置电阻亦可稳定工作;
2)使用运放U12B引入电压正反馈环节,在电阻Ra4低电位端引入反馈电势,使电阻压降大幅减小,流经它的电流也大幅减小,最终达到提升输入阻抗的目的[4-5]。
水听器信号经前置放大后,通过电压射随器送入程控滤波放大芯片LT1564,完成二级放大及抗混叠滤波,LT1564是LTC公司推出的高集成度低噪声8阶程控低通滤波放大芯片,其只需8根数字IO口即可实现1~16倍的增益控制与10~150 kHz的截止频率设置,系统中该控制口线连接ARM微控制器由控制器根据不同的采集环境在线参数设置。为减小系统功耗简化配电电路,模拟电路采用单电源+3.3 V供电,若采用单端模拟信号AD采样,模拟信号动态摆动范围较小仅为3.3 V,因此系统使用LT6530芯片实现单端/差分信号转换工作,转换后电压摆动范围扩大一倍为±3.3 V,放大增益为2。
2.2A/D转换单元设计
A/D转换单元采用ADI公司闪烁型16位ADC芯片AD7687设计实现,该芯片具有16位无失码分辨率、吞吐速率最高250 ks/s、超小尺寸封装及低功耗等特点,电路采用单电源+3.3 V供电,使用差分模拟信号输入,通过4线SPI(serial peripheral interface)接口与ARM微控制器连接。电路原理比较简单不再赘述。
2.3ARM微控制器单元设计
ARM微控制器单元电路图如图3所示,该电路由核心器件ARM微控制器及外围电路组成,主控芯片采用意法半导体公司Cortex M3处理器STM32F103RG,该芯片具有功耗低、工业应用稳定可靠、片内外设丰富等特点,特别适合应用在各种实时工业控制领域。ARM微控制器单元原理图如图3所示。
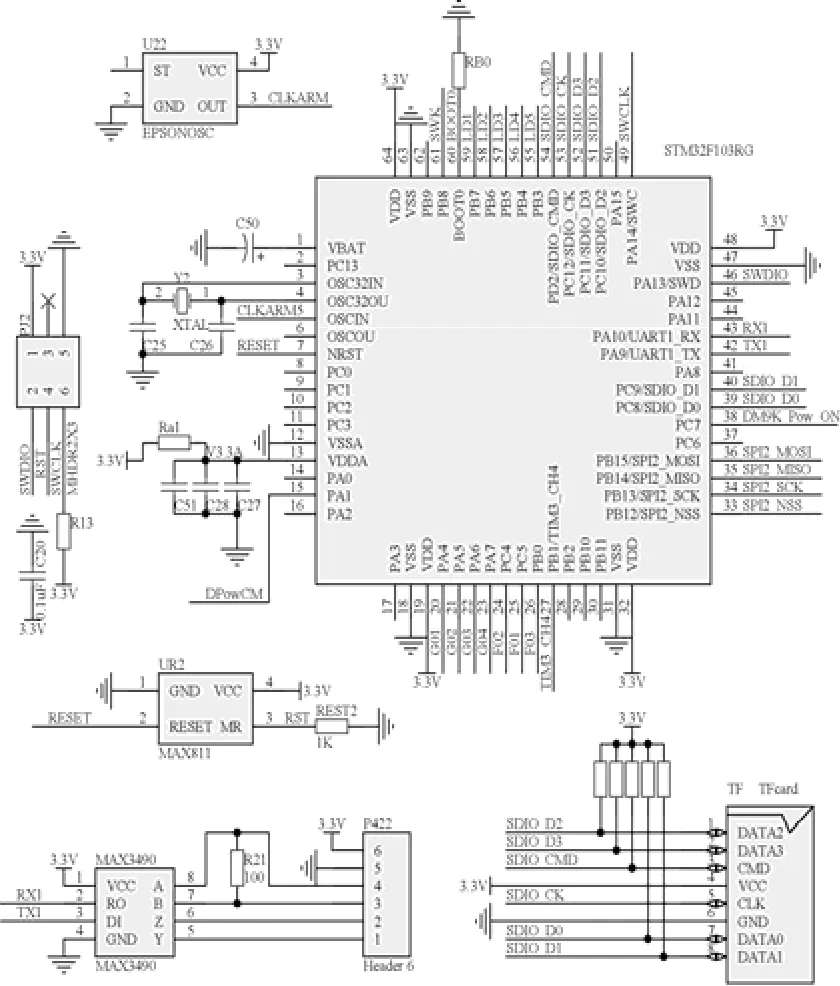
图3 ARM微控制器单元电路图Fig. 3 Unit circuit diagram of advanced RISC machines (ARM) microcontroller
设计中,ARM微控制器负责在线设置程控滤波器参数、A/D转换电路读取及采样频率控制、模拟电路电源控制、采样数据块缓存及TF存储卡存储、系统状态显示系统、按键扫描、电压检测、实时时钟以及PC上位机报文通信等功能。图中有源晶振U22输出频率8 MHz,经ARM内置PLL倍频为72 MHz作为系统主频使用;SWD(serial wire debug)接口可用于ARM芯片软件设计调试与程序下载; 程控滤波芯片控制口与ARM微控制器IO相连,相关参数通过软件在线设定; ARM与TF存储卡采用4线SDIO接口方式相连,传输频率24 MHz数据带宽12 MByte/s;ARM控制器通用异步串行接口经MAX3490电平转换向PC上位机提供RS422接口,完成在线参数设置与状态读取操作。
3 系统软件设计
ARM作为系统的数据控制处理核心完成多种逻辑控制功能,主要包括滤波器带宽与增益设置、A/D采集与控制、数据的存储与传输控制、采集状态机运行、上位机通信等。下面着重就“采集状态机实现”、“系统数据采集与存储流程”两方面作详细论述。
3.1采集状态机实现
采集系统有“任务采集”与“手动采集”2种采集方式:
1)手动采集,系统上电后使用按键或上位机串口“开始采集”和“停止采集”,采集参数按照默认参数执行;
2)任务采集: 系统上电后使用按键或上位机“开始任务”和“停止任务”,系统按照任务指示的时间段、参数设置完成采集过程。为实现上述较为复杂的采集控制逻辑,文中设计使用状态机模型完成设计。
系统状态转换图如图4所示。

图4 系统状态转换图Fig. 4 Chart of system status conversion
系统有“空闲”、“手动采集”、“任务停止”、“任务执行”及“任务采集”5种状态。空闲状态是状态机入口状态,此状态下ARM控制器一方面可响应上位机或按键“开始手动采集”指令进入手动采集状态,另一方面不断查询TF储存卡中是否存有有效任务信息以判断是否进入任务停止状态; 任务停止状态下,可响应上位机或按键“开始手动采集”、“开始任务”指令分别进入手动采集状态和任务执行状态; 任务执行后,系统将按照有效任务的开始结束时间阈和采集参数信息启动、停止任务采集; 任务采集和任务运行状态下,系统可响应上位机或按键“任务停止”指令,强制结束任务并进入任务停止或空闲状态。
3.2系统数据采集与存储流程
系统进入“手动采集”或“任务采集”状态后,ARM控制器开启模拟电路电源供电,并按设置的采集参数初始化SPI外设、定时器、DMA(direct memory access)、乒乓缓冲区、SDIO(secure digital input and output)外设等模块,最终开始采集存储过程。为充分利用ARM控制器芯片处理能力、实现不丢点采集存储功能,系统采用了“DMA+乒乓缓冲区”采集模式,流程图如图5所示。
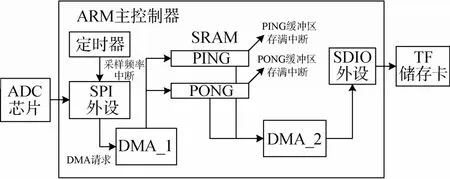
图5 数据采集与存储框图Fig. 5 Block diagram of data acquisition and storage
ADC芯片通过SPI总线与ARM控制器内部的SPI外设相连,SPI模块按照定时器产生的采样频率中断向ADC发起采样通信,读取采样数据;SPI读取数据后发出DMA请求,DMA通道1把SPI数据按顺序依次送入PING缓冲区; PING缓冲区存满后,DMA向CPU发送中断请求,CPU响应中断后,首先将DMA通道1目的地址指向PONG缓冲区前端,而后设置DMA通道2将PING缓冲区数据存放至TF储存卡。PONG缓冲区存满后,再次进行上述操作,交替实现模拟信号无间断、无丢点采集存储过程。
4 结论
文中设计并实现了一种基于ARM微控制器的水声数据采集存储系统,借助现有成熟的高集成度模拟、数字芯片技术,在极小的印制板面积内(约30×80 mm,如图6)集成了低噪声模拟信号前置放大、滤波、采集、存储及上位机远程控制通信等诸多模块。
经测试其基本性能指标如下: 模块采用单节锂离子电池供电(3.7~4.2 V),全功能运行功耗小于200 mW; 放大增益32~56 dB可软件设置(共16挡); 前置放大电路输入级等效阻抗大于1 GΩ;截止频率10~70 kHz可软件设置(10 kHz步进);支持软件设置20,50,80,100,150 ks/s这5种采样频率; 最大可支持128 GB高速TF存储卡标准;可使用RS422总线连接计算机设置采集参数及采集任务。
目前,该设计已集成至某小型水下噪声采集系统中,设备采用球形标准水听器带内灵敏度约-199 dB。图7为该系统在消声水池计量时,采集到的环境背景噪声谱级图(亦可认为是设备采集噪底谱级)。如图所示该系统噪底约在37 dB左右。测试中采样频率设置为100 ks/s、截止频率设置为30 kHz、放大增益设置为50 dB。

图6 印制板布线图Fig. 6 Circuitlayout of printed circuit board(PCB)
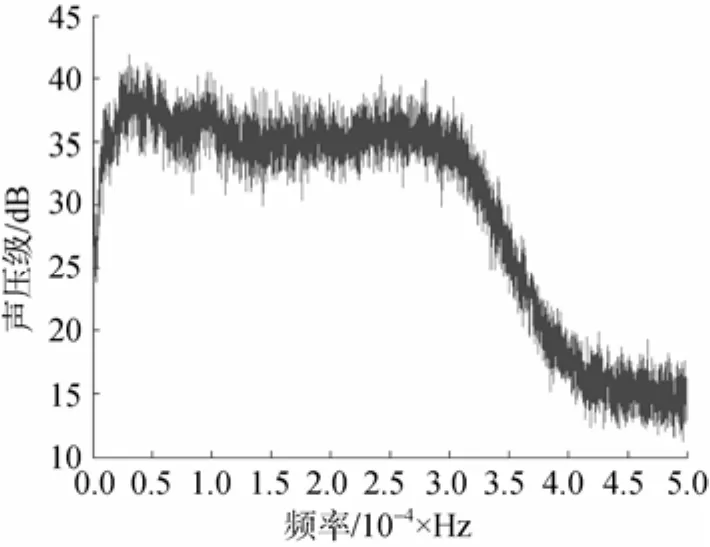
图7 采集系统噪声谱级Fig. 7 Noise spectrum level of data acquisition system
经消声水池及海上试验验证,该采集系统可方便嵌入各种小空间水声设备内部,实现长时间、低噪声、无间断及无人值守的水声数据采集功能,具有较高的经济及实用价值。
[1] 张洪刚,苑秉成. 基于FPGA和SD卡的水声信号高速采集与存储系统设计[J]. 电子器件,2009,32(6): 209-212.
Zhang Hong-gang,Yuan Bing-cheng. Design of a Acoustic Signals High Speed Acquisition and Storage System Based on FPGA and SD Card[J]. Chinese Journal of Electron Devices,2009,32(6): 209-212.
[2] 陈鹏,侯朝焕. 一种新型的水下声信号采集系统[J]. 器件与电路,2004,28(8): 33-34.
Chen Peng,Hou Zhao-huan. A New Type of Underwater Acoustic Signal Capturing System[J]. Audio Engineering,2004,28(8): 33-34.
[3] 周金元,唐原广. 基于海洋资料浮标上目标探测系统的集成设计[J]. 气象水文海洋仪器,2013,26(6): 73-76.
Zhou Jin-yuan,Tang Yuan-guang. Integrated Design of Target Detection System Based on Marine Data Buoy[J]. Meteorological,Hydrological and Marine Instruments,2013,26(6): 73-76.
[4] 刘青峰,张流强.高阻抗微弱信号测量的保护电路设计[J]. 现代电子技术,2009,33(3): 100-102.
Liu Qing-feng,Zhang Liu-qiang. Design of Guard Circuit for High Impedance Weak Signal Measurement[J]. Modern Elecrtonics Technique,2009,33(3): 100-102.
[5] Glen Brisebois. Signal Conditioning for High-impedance Sensors [EB/OL]. http://www.edn.com/article/CA6305356. html,2006,2.
(责任编辑: 杨力军)
Design and Implementation of Micro Underwater Acoustic Signal Acquisition and Storage System
SHANG Fan1,HAO Dong-xu2
(1. 91388th,The People′s Liberation Army of China,Zhanjiang 524022,China; 2. 92840th,The People′s Liberation Army of China,Qingdao 266405,China)
Based on the advanced RISC machines(ARM)microcontroller and TF card,a micro underwater acoustic signal acquisition and storage system was designed to solve the problem that the underwater acoustic information in test cannot be collected and stored with high fidelity for a long time. High integration analog and digital chips were combined effectively in the hardware design to gain the advantages of small size(3×8 cm),low power consumption,flexible parameter setting,and convenient embedding into small-size acoustic equipment. The software was designed by using direct memory access(DMA)plus ping-pang buffer acquisition mode to ensure data acquisition and storage of the micro controller without interruption and missing,and hence to support the system working stably and reliably for a long time. This system has been successfully applied in an underwater noise acquisition experiment.
underwater acoustic signal acquisition and storage; low power consumption; direct memory access(DMA);ping-pang buffer
TB565.4
A
1673-1948(2015)05-0343-05
10.11993/j.issn.1673-1948.2015.05.005
2015-05-20;
2015-08-30.
尚凡(1987-),男,助理工程师,主要研究方向为水声测控.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年20期)2022-11-28
汽车实用技术(2022年7期)2022-04-20
中国信息化周报(2020年15期)2020-05-11
电子制作(2019年7期)2019-04-25
汽车文摘(2017年6期)2017-12-06
电子制作(2017年24期)2017-02-02
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
中国高新技术企业(2015年23期)2015-06-24
