基于活塞流的脉冲式喷水推进技术分析
2015-10-24 03:19:08杜一骄王育才王致强
水下无人系统学报 2015年3期
杜一骄,王育才,蒋 彬,王致强
(西北工业大学 航海学院, 陕西 西安, 710072)
基于活塞流的脉冲式喷水推进技术分析
杜一骄,王育才,蒋彬,王致强
(西北工业大学 航海学院, 陕西 西安, 710072)
为了避免螺旋桨因速度过快而产生的空化问题, 高速水面舰艇倾向于使用喷水推进这一新型推进方式。对于喷水推进在无人水下航行器上的应用, 受到高温高压燃气推动活塞做功这一热功转换形式的启发, 在活塞流的基础上提出一种结构简单、成本低廉的新型脉冲式喷水推进系统, 初步建立了该喷水推进的数学模型, 在此基础上进行了气体膨胀过程的理论计算和数值仿真计算, 并通过计算得到的数据对该模型参数作了进一步的优化,得到更加贴近实际过程的推力和总冲量等相关参数。通过分析计算, 验证了该模型的合理性, 为后续喷水推进技术研究提供参考。
无人水下航行器; 活塞流; 喷水推进; 脉冲式
0 引言
水下航行器的推进形式有多种多样, 其中“螺旋桨推进器+活塞式发动机”是水下航行器一种常见的动力推进装置。作为目前水下航行器的一种常见推进形式, 对转螺旋桨推进主要有以下缺点: 1) 螺旋桨转速受到限制, 发动机需要配备减速装置, 占用了航行器宝贵的空间资源, 还会造成振动、噪声、运行不平稳等一系列问题; 2)对转螺旋桨结构复杂, 制造和检修费用较高。喷水推进是近20年来急速发展的一种特殊新型推进方式, 最早在19世纪末就应用于船舶推进[1]。对于水下航行器而言, 大多数是采用泵喷式喷水推进技术, 其主要原理是由发动机输出轴产生的机械能带动螺旋桨转动, 从而使海水加速, 经过整流叶片的整流作用, 将海水直射入航行器外的介质中, 从而产生反推力推动航行器航行[2]。这种泵喷式喷水推进系统已成功应用在现役鱼雷上,例如俄罗斯的yIMΓT-1空投反潜鱼雷就采用了泵喷式喷水推进系统, 性能相当优异。泵喷式喷水推进技术具有以下优点: 1) 放宽了对发动机输出轴转速的限制。过去的双桨反向推进, 由于前后桨的旋转方向相反, 使得2个桨叶之间的相对转速增加1倍, 更加容易导致“空泡”现象的产生,从而使推进效率大为降低。如果采用单片桨叶推进, 那么空泡化的转速相对来说会有所提高, 有利于提高水下航行器的航速。2) 振动小、噪声较低。推进泵转速相对很高, 传统推进系统的传动结构因此可以非常简单, 系统紧凑; 推进泵叶轮在泵壳内受约束的水流中工作, 能够平稳运行。水下噪声、振动很小[3]。3) 适应变工况的能力强。在航行工况发生变化的条件下, 能充分吸收主机功率, 以调节和适应工况的变化, 在整个航速范围内具有良好的稳定性。然而, 多用于水下航行器的泵喷式喷水推进系统也有其局限性。由于在泵喷式喷水推进系统中仍然存在单片桨叶, 因此无法彻底解决提高航速与空泡化之间的矛盾。
1 脉冲式喷水推进技术原理
由于泵喷式喷水推进具有会产生空化以及效率不太理想等缺点[4], 因此, 为了提高鱼雷的航速, 还需要开拓一种新的途径[5]。文章提出了一种新型脉冲动力推进系统, 即将火箭发动机与喷水推进技术结合应用于水下航行器上。用发动机燃烧室内产生的高温高压气体在活塞管里推动预装的海水做功, 使其向外喷出以形成反作用力,即鱼雷的推力; 水下航行器在航行过程中通过进水口将海水引入活塞管中, 为喷水管源源不断地提供海水。如此循环往复, 就构成了文中脉冲式喷水推进系统的基本原理, 其原理图如图1所示。
1) 进气过程: 高温高压燃气来自燃烧室产生的工质, 通过配气阀将固定质量(即刚好可以将活塞管中水喷出)的高温高压燃气通入活塞管中, 在进气过程中气体会对液体做功, 因此进气过程是产生推力的过程之一。
2) 膨胀过程: 当进气过程结束, 配气阀关闭后膨胀过程开始, 此时通入活塞管中的气体膨胀做功, 将预存在活塞管中的海水喷出, 从而产生反推力推动鱼雷前进, 此过程是一个多变过程。
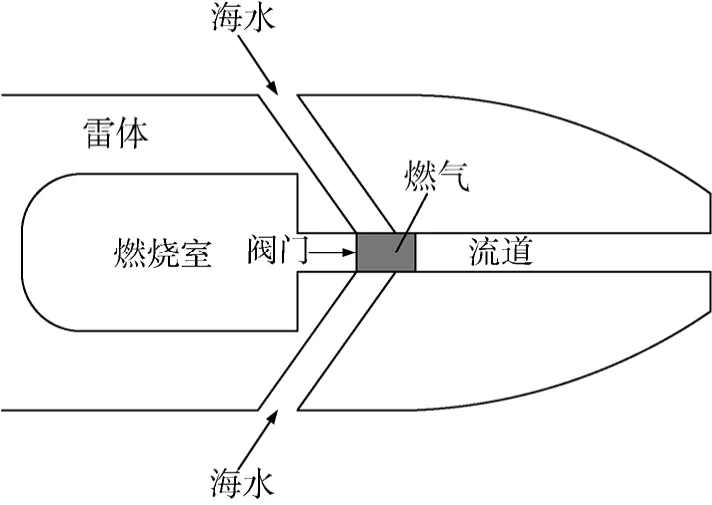
图1 新型脉冲式喷水推进原理图Fig. 1 Schematic of the novel pulse water jet propulsion system
3) 进水过程: 当膨胀过程结束时, 此时活塞管需要通入海水, 这时配水阀打开, 通过雷外向活塞管中通入海水。此过程只是为了将雷外海水引入活塞管中, 并不对鱼雷的航行产生推力。
对于同一个活塞管而言, 上述3个过程是循环进行的, 即是有时序的, 首先为进水过程, 当活塞管内充满海水时, 配水阀关闭, 进水过程结束; 此时配气阀打开, 进气过程开始, 当进入一定量的气体后, 配气阀关闭, 进气过程结束; 此时配气阀关闭, 膨胀过程开始, 当活塞管内的海水全部被喷出后, 膨胀过程结束, 进水过程开始,如此循环往复形成了鱼雷的推力。并且其中只有进气过程和膨胀过程会产生推力, 因此, 对于单个活塞管而言, 其产生的推力并不是一个持续的过程。要想产生稳定的推力, 还需要多个活塞管配合工作。鉴于文章篇幅有限, 因此只讨论单个活塞管的做功过程。
2 理论建模与分析
对于提出的新型脉冲式喷水推进技术方案进行理论计算分析。忽略高温高压燃气与水的热量交换过程, 并且认为高温高压燃气在管内的膨胀过程为等熵膨胀。以活塞管中的水作为研究对象进行受力分析, 设活塞管管长为l, 管径为d; 通入活塞管的高温高压燃气的温度为Tc, 压力为pc; 活塞管外的背压为pe; 在气体膨胀过程中任意t时刻, 设此时活塞管中剩余水的质量为mt,速度为vt, 加速度为at; 管内气体的长度为xt,气体的压力为pt, 那么经过dt时刻后, 假设活塞管中的水在dt时间段内做匀加速运动, 则在t 这个时刻有以下物理学关系。
此时活塞管内的气体长度为

活塞管中水的质量为

水的加速度为

其中: R为活塞管内水所受到的阻力, 主要表现为活塞管中水与壁面的摩擦阻力, 根据流体力学知识可知, 活塞管流动的摩擦阻力为阻力系数, 它与雷诺数相关[5]。
水的速度为

根据动量定理可知, 在t+dt时刻所产生的推力为

通过联立以上公式, 即可求得理论上定熵膨胀过程中所产生的平均推力、膨胀过程所需要的时间等参数。
在气体做定熵膨胀时, 计算可得脉冲式喷水推进所产生的推力; 进气长度; 进气质量; 并且由图2可得, 此脉冲式喷水推进进气所需要的时间; 由图2和图3可得, 从充气到膨胀结束这整个过程所需要的时间
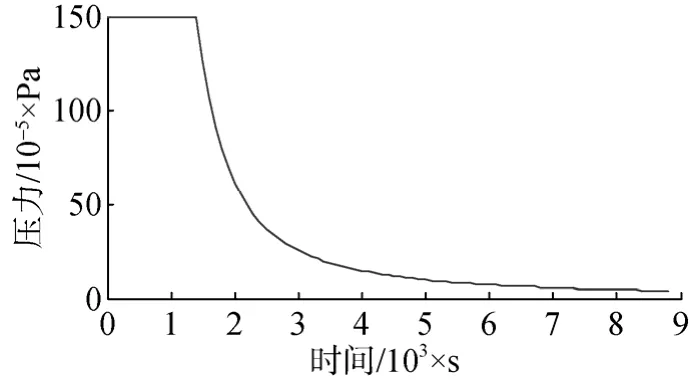
图2 定熵膨胀气体压力随时间变化曲线Fig. 2 Curve of gas pressure versus time in an isentropic expansion process
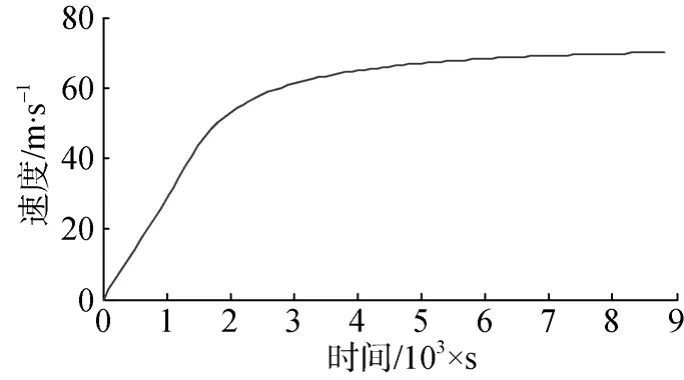
图3 定熵膨胀水流速度随时间变化曲线Fig. 3 Curve of water velocity versus time in an isentropic expansion process
3 多变指数及进气时间的确定
在上述计算中, 将多变指数预取为定熵指数k。热力学中的定熵过程指的是过程中没有发生熵变, 熵值保持恒定的过程。定熵过程在温度-熵图(T-S图)中是平行于温度轴的线段。然而文中的气体在膨胀过程中必然伴随着能量的损耗, 熵值不可能不发生变化, 因此, 文中的计算所使用的多变指数n并不是定熵指数k。
多变过程方程式为[6]

理想气体状态方程式为

将理想气体状态方程式与多变过程方程式联立, 消去比体积, 可得到用温度-压力表示的多变过程方程, 即

由上式可知, 要确定本过程的多变指数n,需已知膨胀前气体温度Tc, 压力pc及膨胀后的温度Tb和压力pb。在上述阐述中, 设定了膨胀前气体温度, 压力, 膨胀后当气体的压力等于此时的背压时, 能量利用率最高,因此, 取膨胀后的气体压力为背压py=0.4 MPa;要求当气体膨胀到0.4 MPa时对应的温度, 就需要借助计算流体力学仿真结果得到。
4 气体膨胀过程仿真
流体体积函数(volume of fluid, VOF)模型是一应用在固定的欧拉网格下的表面多相流跟踪方法。当两相或者多相的流体不相容时, 可采用这种模型[7]。在VOF模型中, 各个流体组分共用一套动量方程, 计算时在全流场的每个计算单元内,都记录下各相组分所占有的体积率或体积分数。VOF模型的应用例子包括分层流、自由面流动以及求得任意液-气分界面的稳态或瞬时分界面[8]。
对于文中的活塞流模型算例而言, 既有燃烧室产生的高温高压燃气, 又有充满管路中的海水,因此该模型属于典型的两相流模型, 并且以使用VOF模型计算为宜。在FLUENT中相关参数设置为: 1) 管长L=500 mm , 管径d=40 mm, 进气孔直径d'=5 mm; 2) 出口水深40 m, 即环境压力约取4× 105Pa; 3) 高温高压燃气取理想气体, 温度Tc=1500 K , 压力pc=1.5×107Pa。FLUENT中的边界条件及相关参数设置如下: 入口压力15 MPa; 出口压力0.4 MPa; 求解器为2D,非定常流动; 时间步长1× 10-6s; 湍流模型为Reliablek-ε模型; 海水密度1024 kg/m3; 动力粘度0.001006kgm· s; 多相流模型VOF模型;SIMPLE算法, 1阶迎风格式; 进出口湍流强度0.5%; 湍流粘度比5。
将通气时间步数设置为2 200步, 输出仿真结果, 得到充气时间为2.2 ms时活塞管仿真云图。当FLUENT中的计算步数达到8 000步时, 活塞管中的海水基本被喷出, 因此可以认为当计算步数到9 000步时, 此次做功过程结束, 由于时间步长为1× 10-6s, 所以从充气到做功结束的整个过程所用的时间为9 ms, 除去充气过程的2.2 ms, 充完气的膨胀做功过程所需时间为6.8 ms。
图4是充气结束时(充气时间2.2ms)活塞管的密度、温度、压力和速度云图, 从密度云图可以很清楚地看到, 当充气2.2 ms时, 气体已经充满了整个活塞管的左端。温度、压力、速度也有不同程度的变化。

图4 充气2.2 ms时活塞管密度、温度、压力及速度云图Fig. 4 Contours of density, temperature, pressure and velocity in the piston tube at 2.2 ms of inflation
图5为膨胀6.8 ms之后(即整个膨胀做功过程结束后)的活塞管密度、温度、压力和速度云图。可以看到, 当膨胀到5.8 ms时, 气体体积基本已经占据整个活塞管, 预存在活塞管中的海水几乎已经被全部喷出, 此时从压力云图可以看出, 气体部分的压力大约在0.4 MPa左右, 也就是说在充气2.2 ms时, 气体做完功后的压力值大约等于此时的背压0.4 MPa, 刚好等于理论计算的设计参数, 此时的工况就是理论计算所设计的工况。
5 多变指数n的计算
从图5可以看出, 当气体膨胀到背压时, 此时气体的温度Tb=440 K , 将此值代入式(8)中可以得到气体膨胀做功过程的多变指数

6 推力及其他参数修正
在上述的理论计算过程中, 文中假设在给喷水管内通气的时候进入管内的气体压力始终保持在15 MPa不变, 然而在实际工程中, 这种情况是不可能存在的, 如果充入管内的压力始终保持不变, 那么高温高压燃气不可能进入活塞管中,比较贴近实际情况的假设是: 当气体刚进入活塞管时, 先进入活塞管中的气体就开始膨胀做功,因此在通气过程中进入喷水管内的气体压力始终是变化的。文中通过取通气过程平均值的方法来确定出进气阶段气体压力值的变化。通过FLUENT软件仿真计算每隔0.1ms时的气体压力值, 并求平均可得=12.55 MPa。
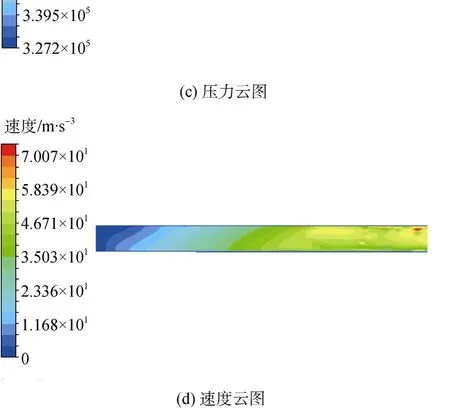
图5 膨胀6.8 ms时活塞管密度、温度、压力及速度云图Fig. 5 Contours of density, temperature, pressure and velocity in the piston tube at 6.8 ms of expansion
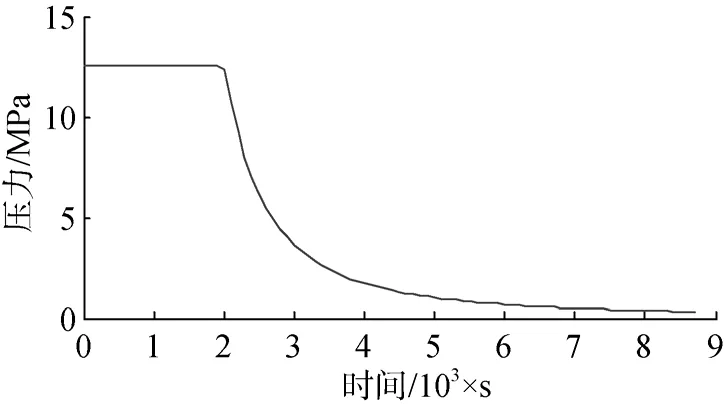
图6 多变过程气体压力随时间变化曲线Fig. 6 Curve of gas pressure versus time in a polytropic process
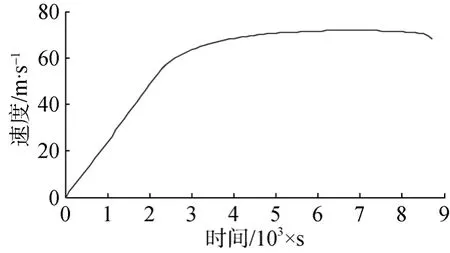
图7 多变过程水流速度随时间变化曲线Fig. 7 Curve of water velocity versus time in a polytropic process
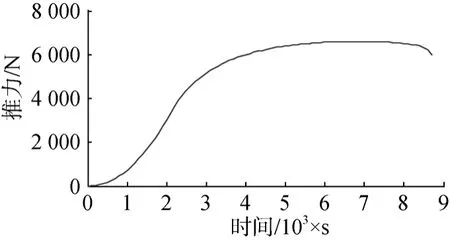
图8 多变过程推力随时间变化曲线Fig. 8 Curve of propulsive force versus time in a polytropic process
经过修正的进气时间以及整个做功时间基本与仿真结果相同。
以MK46鱼雷为例, 如果脉冲式喷水推进系统能产生4.86× 103N的力, 那么如果在稳定工况航行, 会使MK46鱼雷达到约35 ms的速度。可见, 文中提出的脉冲式喷水推进系统能够适合于高速鱼雷推进。
7 结束语
文章在活塞流的基础上提出一种新型的脉冲式喷水推进系统, 并对这种脉冲式喷水推进系统进行建模与分析; 通过CFD的方法对气体膨胀做功过程进行了分析, 计算得到多变过程中的关键参数(气体膨胀做功结束后的温度值),在此基础上确定了在确定参数下气体膨胀做功的多变指数, 并且根据此指数修正了脉冲式喷水推进系统所能产生的推力、进气量等关键性参数, 初步验证了脉冲式喷水推进系统的合理性。
[1]王立祥.船舶喷水推进[J].船舶, 1997(3): 45-52.
[2]李云魁.喷水式鱼雷推进系统综论[J].现代舰船,1998(8):32-33.
[3]李晓辉, 朱玉泉, 聂松林.喷水推进器的发展研究综述[J].液压与气动, 2007(7): 1-4.
Li Xiao-hui, Zhu Yu-quan, Nie Song-lin. The Overview of Development and Research for Waterjet Propulsion[J]. Chinese Hydraulics & Pneumatics, 2007(7): 1-4.
[4]石秀华, 王晓娟. 水中兵器概论(鱼雷分册)[M]. 西安:西北工业大学出版社, 2005.
[5]刘柱, 孟凡立. 船舶喷水推进技术发展[J]. 航海技术,2004(4): 42-44.
Liu Zhu, Meng Fan-li. The Development on Technology of Water Jet Propulsion for Ship[J]. Marine Technology,2004(4): 42-44.
[6]张宇文. 鱼雷外形设计[M]. 西安: 西北工业大学出版社, 1998.
[7]冯青, 李世武, 张丽. 工程热力学[M]. 西安: 西北工业大学出版社, 2006.
[8]于勇, 张俊明, 姜连田. Fluent入门与进阶教程[M]. 北京: 北京理工大学出版社, 2008.
[9]安德森. 计算流体力学入门[M]. 姚朝晖, 周强, 译. 北京: 清华大学出版社, 2010.
(责任编辑: 陈曦)
Analysis of Pulse Water Jet Propulsion Technology Based on
Plug Flow Principle
DU Yi-jiao,WANG Yu-cai,JIANG Bin,WANG Zhi-qiang
(School of Marine science and Technology Engineering, Northwestern Polytechnical University, Xi′an 710072, China)
To avoid cavitation of a propeller at high rotational velocity, high speed surface ships incline to use water jet propulsion systems. This study is inspired by the conversion of heat into power in high temperature and high pressure gas driving a piston. According to the principles of plug flows, a novel pulse water jet propulsion system is presented with low costs and simple construction, and the model of the water jet propulsion system is established. According to this model, theoretical calculations and numerical simulations are conducted in the expansion process. With the simulation results, the parameters of the model are optimized, thus the relevant parameters which are closer to real working conditions, such as propulsive force and total impulse, are obtained. Calculation results verify the reasonability of the proposed model.
unmanned underwater vehicle(UUV); plug flow; water jet propulsion; pulse
TJ630.32
A
1673-1948(2015)03-0202-06
2014-12-15;
2015-02-03.
杜一骄(1989-), 男, 硕士, 主要研究方向为水下动力推进系统.
猜你喜欢
小学生学习指导(小军迷联盟)(2023年3期)2023-03-27 09:22:30
农业工程技术(2022年1期)2022-04-19 13:58:12
小哥白尼(军事科学)(2021年8期)2021-11-22 07:58:22
疯狂英语·新读写(2021年6期)2021-08-05 07:49:10
小哥白尼(军事科学)(2020年8期)2020-05-22 06:28:02
中学生英语(2017年6期)2017-07-31 21:28:55
青年歌声(2017年6期)2017-03-13 00:57:56
海洋世界(2014年2期)2014-02-27 15:25:32
汽车与新动力(2014年5期)2014-02-27 12:10:46
汽车与新动力(2014年4期)2014-02-27 12:10:38