
基于非线性模型预测控制的飞机全电刹车控制
2015-10-22 09:41王鹏李玉忍梁波付龙飞
西北工业大学学报 2015年6期
王鹏,李玉忍,梁波,付龙飞
(西北工业大学自动化学院,陕西西安 710072)
基于非线性模型预测控制的飞机全电刹车控制
王鹏,李玉忍,梁波,付龙飞
(西北工业大学自动化学院,陕西西安 710072)
针对飞机全电刹车系统的非线性和不确定性,分析了全电刹车系统工作原理,建立了系统数学模型并提出了一种基于准无限时域非线性模型预测控制的飞机全电刹车控制算法;该方法通过实时预测、滚动优化以及反馈校正的策略完成对非线性对象的高效控制,且在满足一定设计规则的前提下具有渐近稳定性;仿真结果表明,与传统的模糊PID控制方法相比,该方法能够控制全电刹车系统获得更稳定和优化的滑移率,从而提供更好的刹车性能。
全电刹车;预测控制;非线性;滑移率;仿真;Matlab
相对于液压刹车,飞机全电刹车系统具有重量轻、效率高、维修便利以及可靠性高等优点,是飞机刹车系统的主要发展方向[1-2]。但飞机全电刹车系统是一类具有高度非线性特性的复杂系统,且系统参数具有时变性和不确定性,加之难以精确建立系统动力学模型,使得基于传统PID等方法的刹车控制系统无法充分发挥全电刹车的优势,刹车效率较低[2]。
近年来,研究人员将多种控制理论应用于飞机全电刹车控制系统的研究和设计,并取得了一定的成果。文献[3]将参数模糊自整定PID策略用于飞机全电刹车的控制,自整定方法以滑移率偏差和偏差变化率为输入,应用模糊集和理论建立PID参数与滑移率及滑移率偏差的二元连续函数关系,从而输出自整定的PID参数。文献[4]中,自适应模糊控制算法则直接被用于刹车系统的控制,该方法以滑移率为控制对象,通过大量实验数据提取出最佳性能指标并运用自适应模糊控制方法动态调整控制参数,力求跟踪最佳滑移率。文献[5]运用神经网络构造最佳滑移率识别器,从而为控制器提供滑移率的参考值,通过用大量测试数据对神经网络进行训练,识别器在工作过程中可以实时为控制器给出最佳滑移率的参考值。而在这些控制策略设计和实施的过程中,通常需要从大量的实验数据提取相关参数或对控制器进行训练,且对于实验数据未涉及到的条件难以具备自适应能力。模型预测控制(model predictive control,MPC)是一种面向工业过程的计算机控制算法,该方法采用实时预测、滚动优化以及反馈校正,实现在线地利用状态和输出对内部模型进行预测,以某个性能指标最优化为目标计算最优控制序列,并用于被控对象的反馈控制机制。模型预测控制对外部干扰和模型不确定性具有较好的适应性和控制性能,因此对被控对象建模要求低,该方法鲁棒性好、设计简单且能够动态、显式地处理系统约束。近年来,模型预测控制方法在先进制造、航空航天、工业控制等方面得到了一定的应用,相对于上述其他控制方法,模型预测控制具有更好的鲁棒性和自适应能力。
本文以某型飞机全电刹车系统为对象,研究了其刹车电机转速、滑移率和结合系数等参数之间的非线性关系;研究了非线性模型预测控制的基本原理,并将准无限时域非线性模型预测控制方法用于全电刹车系统的控制;通过仿真结果对比分析,说明非线性模型预测控制方法能够获得较传统控制方法更好的刹车效果。
1 全电刹车数学模型
本文研究对象为某型前三点式起落架飞机的全电刹车系统,该系统结构如图1所示:
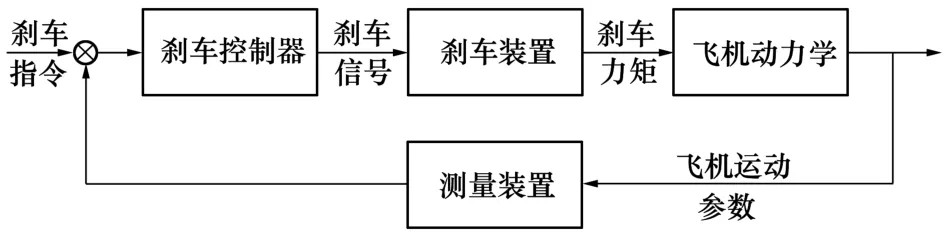
图1 全电刹车系统框图
假设飞机滑跑过程中重心高度和质量均不变,则着陆滑跑过程的受力如公式(1)~(3)所示:
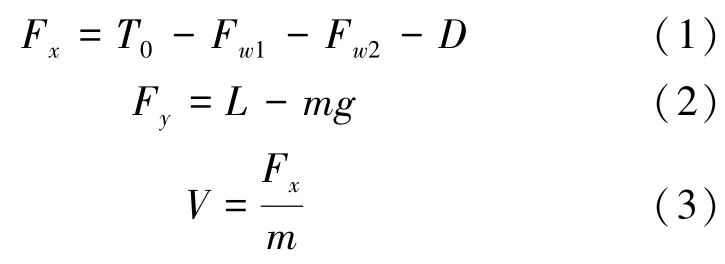
式中,Fx、Fy分别指飞机在沿着以及垂直于滑跑方向上的受力;T0为发动机残余推力;L、D分别为飞机所受气动升力和阻力;m为飞机重量;V为滑跑速度;Fw1、Fw2分别指前机轮和主机轮上所受的摩擦力。
全电刹车系统由直流无刷电机驱动滚珠丝杠压紧制动盘以产生刹车力矩,进而提供机轮与跑道之间的结合力矩。其中滚珠丝杠用于将电机旋转运动转化为直线运动,2种运动的关系如公式(4)所示:

式中,ω为电机转动角速度;t为刹车作用时间,以丝杠刚开始接触刹车盘为零时刻;l为旋转造成的丝杠位移量;H则为丝杠的基本导程。
丝杠位移所产生的刹车力矩则如公式(5)所示:

式中,Kt为丝杠位移到刹车压力的放大系数;μmc为刹车盘摩擦系数;nmc为摩擦面个数;Rt、rt分别为静刹车盘外半径和动刹车盘内半径。机轮转动的角速度和线速度则如公式(6)、(7)所示:
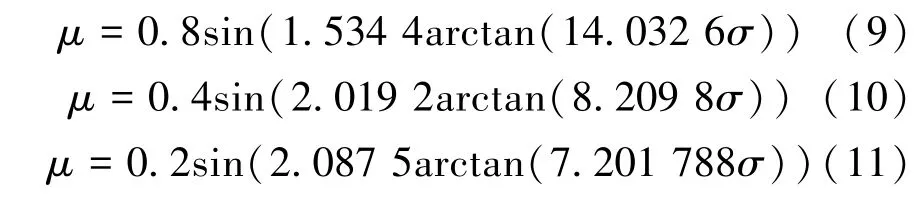
式中,Jr为机轮转动惯量,Rr为机轮半径,Mj则为机轮与跑道之间的结合力矩,由公式(8)所示:

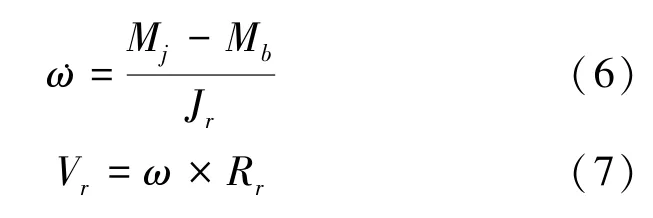
式中,n为主机轮个数,Pm为主机轮所受垂向载荷,μ则为机轮与跑道之间的结合系数,通常情况下,干跑道、湿跑道以及积雪跑道的结合系数可近似由公式(9)~(11)计算所得[6](如图2所示):
式中,σ为机轮线速度与滑跑速度之间的滑移率,即。

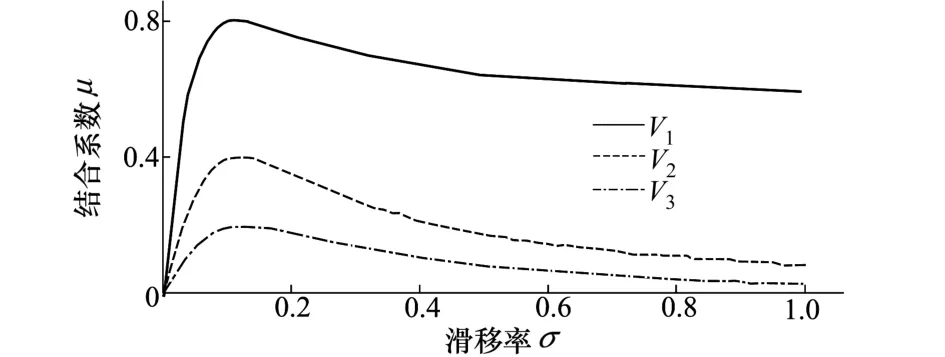
图2 不同跑道环境下滑移率与结合系数关系(V1<V2<V3)
2 非线性模型预测控制
模型预测控制作为一种约束系统优化控制方法,其基本思想是综合利用当前和历史信息和被控对象模型来预测被控对象未来的状态,并通过对性能指标函数不断进行滚动优化,得出最优的控制输入(如图3所示),再根据控制过程中所得输出信息对预测模型进行修正,从而获得良好的控制效果和鲁棒性[7-8]。其基本流程可分为以下几个步骤:
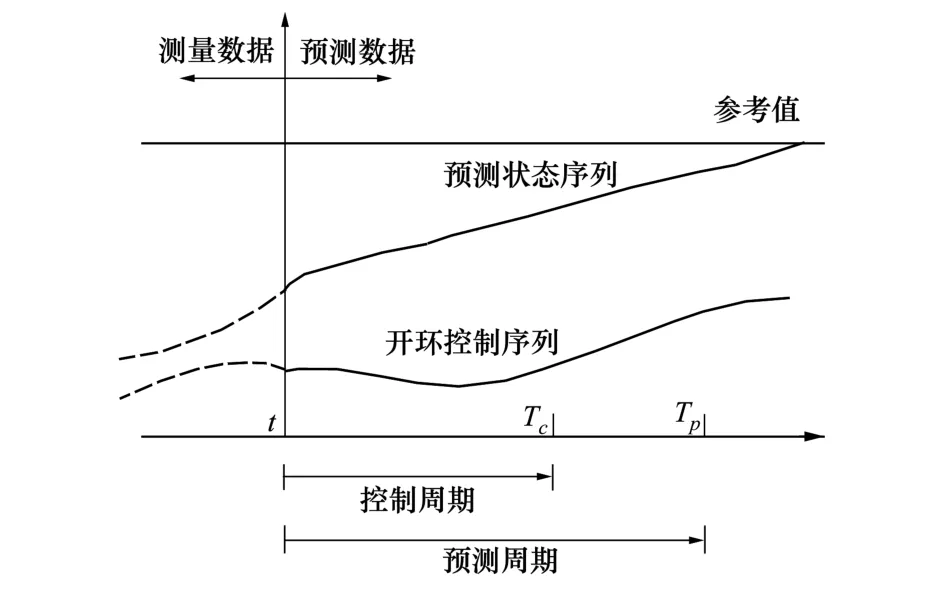
图3 模型预测控制
1)根据当前和历史信息对被控对象未来一个时间段内的状态进行预测;
2)搜索未来一个时间段内的最优输入序列,使得某性能指标函数达到最小;
3)将最优输入序列中的第1组取值作为被控对象的控制输入;
4)开始新的控制周期,重新运行步骤1)~步骤3)。
考虑如公式(13)所示的非线性系统模型:

并满足

式中,x表示系统状态向量,X为系统状态的可行域,且X∈Ri,u表示系统的输入向量,U为系统输入的可行域,且U∈Rj。
假设当前时刻的时间点为t,模型预测过程需要搜索[t,t+Tp]时间区间上的最优的输入序列u¯,即,求解开环最优控制问题使得如公式(14)所示的性能指标函数在[t,t+Tp]时间区间内达到最小:

式中,目标函数中各项以系统状态误差向量与输入向量的加权二次型表示,即:

式中,xs、us分别为系统状态向量和输入向量的参考值,Q、R为正定对称的权值矩阵。
在公式(11)所示的性能指标函数中,预测时域为有限长度Tp,因此开环模型预测控制律的最优性并不能等同于闭环系统的最优性和稳定性,因此保证闭环系统稳定性最直接的方法便是将预测时域延长至无限,此时,只需优化问题有解即可保证闭环系统的稳定性。而由于模型预测控制优化问题解析解通常不易计算甚至不存在,因此无限时域在工程上无法实际应用。
准无限时域模型预测控制方法的思路是在如公式(11)所示的性能指标函数中加入终端罚函数项:

式中,Ω称为终端区域,此时最优化问题的性能指标函数则变为:

当对于所有的x∈Ω均存在连续局部控制律
且满足

时,只要开环最优控制问题(14)在t=0时具有可行解,则对于满足条件
的所有采样时间δ,闭环控制系统均具有渐进稳定性。
为了便于分析和设计,本文采用的预测周期Tp与控制周期Tc相同,即在控制系统运行过程中,每个控制周期优化所得的输入向量作为下一个控制周期的系统输入。
3 仿真结果
本文以某型飞机全电刹车系统为例,通过将模糊PID方法与本文方法所得仿真结果进行对比,说明基于准无限时域非线性模型预测控制(以下称本文方法)的飞机全电刹车控制系统具有良好的刹车性能。
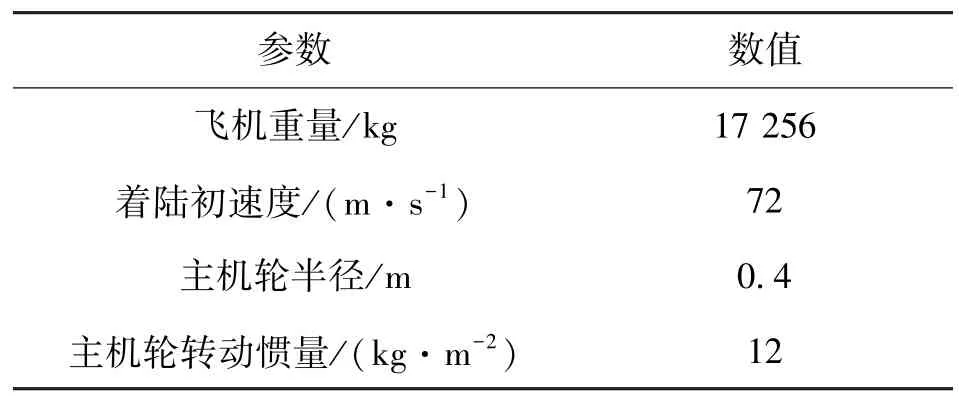
表1 飞机及刹车系统主要参数
本文数值仿真所采用的飞机及其全电刹车系统部分主要参数由表1所示,被控对象为刹车装置和飞机动力学的组合系统,选择输入参数为电机转速ω,状态为飞机的刹车距离S以及滑行速度V,因此公式(10)所示的对象模型则可表示为:

性能指标函数则可表示为:
当着陆条件对要求刹车距离尽可能短时,需要增大权值矩阵Q中元素的取值;而当刹车系统故障等原因需要减小刹车负荷时,则需增大权值矩阵R中元素的取值。
由于该非线性模型预测控制问题可以归结为在每个控制周期内求解二次型最优化问题,本文采用SNOPT软件包该问题进行求解。
由于本文仿真过程中不考虑刹车系统故障,性能指标函数倾向于获得最短的刹车时间和刹车距离,因此性能指标函数中的各权值(矩阵)选择如下:

如图4所示为以表1所示的初始条件下,并以最短刹车距离为目标,飞机在干跑道着陆时,本文方法与模糊PID方法控制全电刹车系统所得滑移率对比,可以看出:由于非线性模型预测控制方法能够实时地对被控对象的变化趋势进行预测,因此在飞机速度快速变化的过程中,能够获得较模糊PID方法更平稳的机轮滑移率。而对比图2中滑移率与结合系数的关系也可以看出:本文方法所得滑移率在整个刹车过程中也更接近于最佳滑移率。
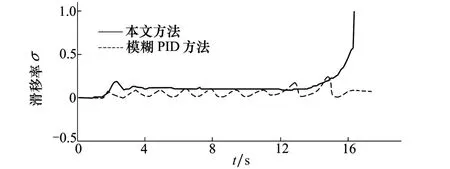
图4 滑移率对比
如图5所示即为本文方法与模糊PID方法所得结合系数对比,由于本文方法所得机轮滑移率始终接近于最佳滑移率,因此使得结合系数也更接近于最大值,且较模糊PID方法更为平稳。
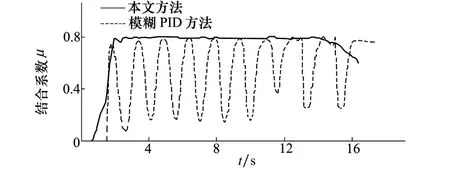
图5 结合系数对比
图6所示为2种控制方法所得飞机速度对比,可以看出:由于本文方法能够使得结合系数始终接近于最大值,从而提供更大更平稳的刹车力矩,因此速度下降更迅速平稳,将刹车时间缩短了1.04 s,刹车距离缩短了70.83 m(如图7所示),显著提高了刹车系统性能。
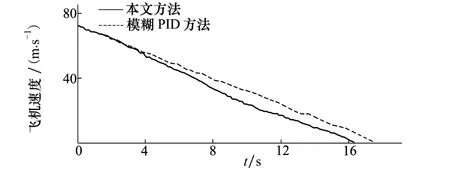
图6 飞机速度对比
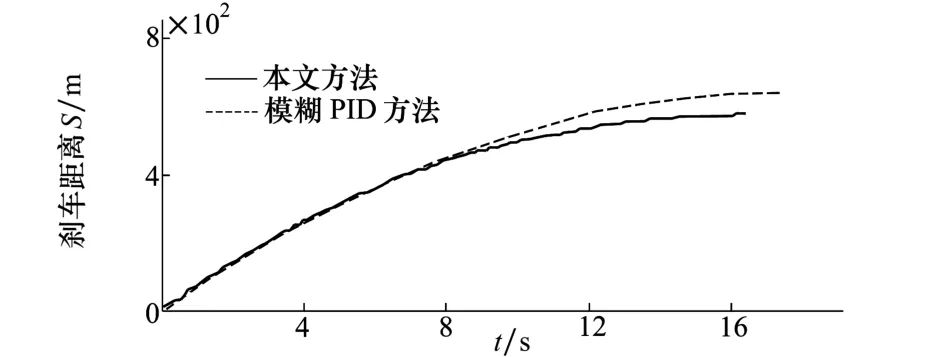
图7 刹车距离对比
4 结 论
本文研究了飞机全电刹车系统的工作原理,并建立了面向控制的数学模型;研究了非线性模型预测控制方法的原理和稳定性,提出了基于准无限时域非线性模型预测控制的飞机全电刹车控制方法。仿真结果表明:相对于传统的模糊PID全电刹车控制方法,本文提出的方法能够为飞机提供更稳定和优化的机轮滑移率和结合系数,从而有效缩短刹车距离和刹车时间。
[1] 李洪果,王锴,吴瑞祥,等.飞机全电刹车系统研究[J].北京航空航天大学学报,2004,30(4):339-343
Li Hongguo,Wang Kai,Wu Ruixiang,et al.Demonstration of an Plane Electrically Actuated Brake[J].Journal of Beijing University of Aeronautics and Astronautics,2004,30(4):339-343(in Chinese)
[2] 张智慧,李玉忍,梁波.飞机刹车系统最佳滑移率性能研究[J].计算机仿真,2014,31(10):48-51
Zhang Zhihui,Li Yuren,Liang Bo.Research on Optimum Slip Ratio Characteristic of Aircraft Braking Systems[J].Computer Simulation,2014,31(10):48-51(in Chinese)
[3] 蔡文举,林辉.参数模糊自整定PID在飞机全电刹车中的应用[J].电光与控制,2008,15(2):39-42
Cai Wenju,Lin Hui.Aircraft Electric Braking System Based on Parameter Fuzzy Automatic Adjustive PID[J].Electronics Optics&Control,2008,15(2):39-42(in Chinese)
[4] 李晖晖.基于模糊控制的飞机全电刹车系统研究[D].西安:西北工业大学,2003
Li Huihui.Research on Fusszy Control of Electric Brake of Aircraft[D].Xi′an,Northwestern Polytechnical University,2003 (in Chinese)
[5] 田广来,谢利理,岳开宪,等.飞机防滑刹车系统的最佳滑移率控制方法研究[J].航空学报,2005,26(4):461-464
Tian Guanglai,Xie Lili,Yue Kaixian,et al.Study on Optimal Control Method of an Aircraft Anti-Skid Braking System Based on Slip-Ratio[J].Acta Aeronautica et Astronautica Sinica,2005,26(4):461-464(in Chinese)
[6] 王纪森.非线性控制理论在防滑刹车系统中的应用[D].西安:西北工业大学,2001
Wang Jisen.Study on Optimal Control Method of an Aircraft Anti-Skid Braking System Based on Slip-Ratio Nonlinear Control Thoery And ITS Application to Aircraft Antiskid Brake Systems[D].Xi′an,Northwestern Polytechnical University,2001(in Chinese)
[7] Morari M,Lee J H.Model Predictive Control:Past,Present and Future[J].Computers and Chemical Engineering,1999,23 (4):667-682
[8] Findeison R,AllgÄower F,Biegler L T.Assessment and Future Directions of Nonlinear Model Predictive Control[M].Berlin,Springer,2007
Aircraft Electrically Actuated Brake Control Based on Nonlinear Model Predictive Control Method
Wang Peng,Li Yuren,Liang Bo,Fu Longfei
(Department of Automatic Control,Northwestern Polytechnical University,Xi′an 710072,China)
The nonlinearity and uncertainty of aircraft electrically actuated brake control system is analyzed and aircraft electrically actuated brake control based on quasi-infinite horizon nonlinear model predictive control method is proposed.With real-time prediction,rolling optimization and feedback regulation strategy,efficient control of nonlinear object can be achieved and the stability can be guaranteed under certain design rules.The simulation results and their analysis indicate preliminarily that,compared with traditional fuzzy PID control method,under the control of this method,the slip ratio of electrically actuated brake system is more stable and optimized and the braking performance is much better.
aircraft,angular veloaity,braking,computer simulation,control,efficiency,electric brakes,feedback,fuzzy control,mathematical models,MATLAB,matrix algebra,model predictive control,real time control,stability,velocity,braking system,nonlinears,nonlinear model predictive control,slip ratio
V226
A
1000-2758(2015)06-0989-05
2015-03-17
王鹏(1981—),西北工业大学博士研究生,主要从事计算机仿真与测控及电力电子与电力传动等研究。
猜你喜欢
低温与特气(2022年2期)2022-11-26
石油沥青(2021年1期)2021-04-13
哈尔滨轴承(2021年4期)2021-03-08
空间科学学报(2020年4期)2020-04-22
铝加工(2019年5期)2019-02-08
考试周刊(2017年7期)2017-02-06
制冷技术(2016年4期)2016-08-21
科普童话·百科探秘(2015年6期)2015-10-13
伴侣(2015年5期)2015-09-10
大众科学(2015年10期)2015-09-10
