在移动干坞上预制沉管管段测量基准的建立
2015-10-21 19:41李树光等
建筑工程技术与设计 2015年5期
关键词:控制测量
李树光等

摘要 采用半潜驳船作为移动干坞制作管段,精度控制是保证工程成败的关键。在不稳定的半潜驳上进行测量工作,必需建立符合驳船工作条件的测量控制系统。本文介绍了作者在广州仑头—生物岛沉管隧道工程中移动干坞制作管段的测量控制系统建立方法,后方交会法和船体坐标系统法。并对方案实施的精度进行的阐述。
关键词:半潜驳,测量基准,控制测量
Abstract: It is a essensial condition to establish a aproperiate sueveying datum on a unstable deck. The precision of structural member manufactured depends on that of surveying. In the paper, the the authors introduced two methods to establish surveying contrual system on the large semi-submergible deck barge. The methods include the trilateration and the deck—datum system. As a example,the field surveying deal with a contral network by theodlite is describe in the paper.
Key Words: semi-submergible deck barge, surveying datum, contral surveying
1 概述
目前,沉管隧道已广泛应用于我国的跨江隧道建设。通常,大型的沉管结构的预制是在陆地干坞上进行,不仅费工程费用较大,而且还会对周围环境会产生非常不良的影响。
采用半潜驳船作为移动式浮船坞完成大型结构预制件的制作,是一种理想的方案。该方案在缩短工期、减少造价、保护环境等方面具有很显著的优势。
在移动干坞上制作管段,技术上所存在的主要困难在于测量控制系统的建立。沉管管段制作的精度要求较高,在活动的船上制作管段,制作精度的控制是保证工程成败的关键。
在任何工程测量问题中,要获得可靠的结果,必须有稳定的测量基准和符合仪器原理的工作方案。常规的工程测量一般是在陆地上进行的,其中大地水准面是常规测量时必需的基准面。所有的大地测量仪器的结构都是为在大地水准面上进行观测而设计的,不管是高差测量或是水平角测量都以大地水准面为测量基准的。因为大地水准面是个物理面而不是数学面,所以无论经纬仪还是水准仪都必须通过与竖轴垂直的水准管建立水平基准面 。
在不稳定的半潜驳上进行测量工作,不可能象在陆地上一样以大地水准面为基准。即使在制管前驳船具有较好的稳定性,可以建立满足大地测量基本条件的控制系统。但随着工期的进行,船上荷载不断变化,驳船的稳定性必然会受到破坏,加上船体在荷载会产生各种变形,从而使后续的工作中无法在以已有的控制系统为基准。因此必需建立符合驳船工作条件的测量控制系统。
2 测量基准
2.1 空间后方交会
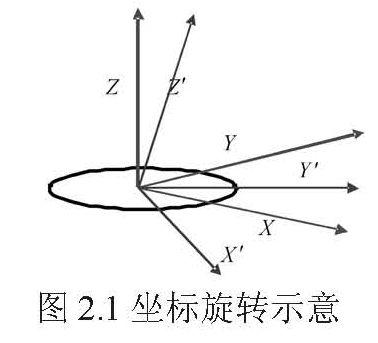
为了保证在移动干坞上制作管段或其它大型构件时测量能在统一的坐标系统下进行,首先需要建立有效的测量基准点。如图2.1所示,设有空间直角坐标系 ,其中 轴代表经纬仪的竖轴,旋转平面代表水平度盘。当经纬仪整平时,水平度盘与大地水准面平行。从数学角度上讲,该坐标系统共有3个旋转自由度。因为测量时,经纬仪的水平度盘是可以任意配置的,所以在推算仪器倾斜所引起的坐标变换时,不必考虑绕竖轴旋转的问题,实际上坐标系的换算只需考虑旋转平面的重合。
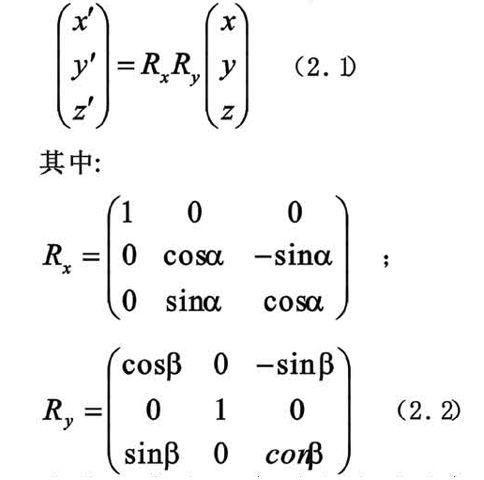
对于仪器在任意方向上存在一倾角,可以视为是原坐标绕 轴旋转 角度,绕 轴旋转 角度后所得的新坐标系 。
以上方程中共有5个未知数, 个物方已知点可以观测 个独立的水平角和 个独立的竖直角。当独立方程的个数大于上述未知数个数时,可以通过最小二乘法求解该方程组,从而确定经纬仪的状态参数。
然而,由于观测时的仪器状态是处于 坐标系下的,所以求解出的测站点坐标也是该坐标系下的 。对于 个控制点,存在 不同的坐标系,因此必须对各测站点的坐标计算值进行旋转逆变换,将它们统一到相同的坐标系下:
统一坐标计算值的目的不仅在于确定各点平面坐标之间的相对关系,更重要的是要利用各点的高差来对仪器进行实际调整,使调整后的仪器都具有相同的姿态,以便今后进行工程观测。
通过后方交会建立控制系统按以下步骤进行:
(1) 在驳船刚性较好的部位标定5个以上的物方点,并通过陆地已知点经过重复测量测定物方点的三维坐标;此时的物方点坐标值为大地坐标系中的数值。进行上述测量过程的前提是驳船必须处于稳定状态。当驳船的稳定性不符合要求时,也可首先以一台仪器为基准状态,通过极坐标法测定各物方点坐标,但此时的坐标系统与大地坐标系无关。
(2) 在驳船适当处设立工程所需的后交点,后交点的数量视制管工程的需要而定。后交测站采用固支脚架,为了避免每次测量都进行后交测量,应采用固定基座。
(3) 依前面所述,对各后交点进行观测,并计算统一坐标系下的坐标值。
(4) 将设为基准状态仪器的望远镜置90 (与竖轴垂直),并平标出一条基准线。
(5) 将各测站仪器的望远镜置90 ,此时望远镜中心所扫出的平面线应与基准线存在一个高差,根据高差既可以用脚螺旋调整仪器状态。
(6) 为了保证精度,1—5过程应重复进行。
在实施以上过程前,必须对仪器进行检校,尽可能地消除经纬仪竖盘指标差,或对竖盘指标差进行嚴格地测定。
从理论上讲,这一方法是完全可行的,但需要一定的数学处理步骤。从应用角度考虑,可以采用更为简单的方法。
2.2 船体坐标基准面的设置
尽管地球本身是个随时都在运动着的物体,但在陆地上进行的大地测量或工程测量,都是相对于地球为不动体而言的。大地坐标系是随地球一起运动的,只要某一时期内地球本身的变形可以忽略,就可以将地球作为静止参考系。
同样,构件放置的基础是驳船甲板,只要驳船甲板上的坐标系相对船体静止,并且驳船甲板的变形可以忽略或者可以识别,也就可以采用独立的船体坐标系作为工作基准。
船体坐标参考系的建立按以下步骤:
(1) 在工程实施前对仪器进行检校,消除经纬仪竖盘指标差,或对竖盘指标差进行严格地测定。
(2) 在驳船首尾各固定两根水准标尺,可能的情况下采用铟钢尺。其中三把标尺作为确定基准面,另一把标尺用于备用和检核。
(3) 在驳船上合适位置设置6-8个固定测站,测站采用固支脚架。
(4) 在某一测站上安置经纬仪(一号仪器)。仪器的安置应使基座脚螺旋的方向如图(4.5)所示,其中两个脚螺旋的中心连线与驳船方向一致。当经纬仪的竖盘指标差已消除时,将仪器望远镜在盘左时的竖盘读数固定在90 ,如果竖盘指标差为 ,则将竖盘读数固定在90 - ,此时望远镜视准轴与经纬仪竖轴处于垂直状态。
(5) 通过A﹑B脚螺旋调节,使望远镜十字丝中心对准前后两把标尺的相同读数。
(6) 通过C脚螺旋调节,使望远镜十字丝中心大致对准中部标尺的相同读数。
(7) 检查前后标尺读数,必要时重复上述过程。
(8) 记录各标尺上所有读数。此时所得到的旋转面既作为基准面。
(9) 在所有固定脚架上安装基座,以原先确定的基准面测定个基座中心高程。测定个基座中心高程时可以采用小钢尺,也可采用一段铟钢尺。钢尺读数减去15公分,即是基座高程。这时所获得的高程只作为近似值,为其它仪器寻找基准面提供参考。
(10) 取下仪器旋转部,基座作为固定基座。在以后的测量中只要将仪器旋转部安上而不必进行对中及寻找基准面的工作。
(11) 测定高程后,在各固定基座上依次安放仪器,按与第一台仪器间的高差瞄准标尺读数。注意:在瞄准标尺读数时,必然要调整脚螺旋而使基座高程改变,但只要各标尺的读数与一号仪器读数的差值相等,就获得了相同的基准面,此时的读数差即是与一号仪器间的真正高差。
确定各仪器的基准面是一项重要工作,务必仔细。
3 测量精度
观测精度与以下因素有关:(1)观测者的因素;(2)外界条件的影响;(3)测量仪器的因素;(4)测量方案。前三个方面综合起来称观测条件。在同样的观测条件下所进行的观测称为等精度观测,否则就是非等精度观测。为了获得满足要求的观测结果,需要预先估计测量误差,以便拟定合理的工作方案。
为了保证测量达到一定的精度要求,除了所使用的仪器各轴系之间必须满足应有的几何关系,还需要认真分析在该工况下产生测量误差的原因,从而制定消除或减弱误差的基座用来支承整个仪器,并借助中心螺旋使经纬仪与脚架结合。除此之外,基座有其更重要的作用。当仪器的轴系完全满足几何关系时,仪器的整平、对中实际是对基座面的整平和基座中心孔的对中。利用基座的這一作用,在高精度重复测量时,可以采用固定基座的方法。这一方法属于强制对中整平方法。
在所有建立在驳船上的固定测站上安置基座,并将仪器的照准部依次放在各基座上。在获得测量基准面后,只取下照准部,而将基座固定在脚架上。以后测量时,只须将照准部插上即可,无须再进行对中整平。这样一方面速度快,另一方面消除了各次测量时的整平对中误差,使观测精度提高。
3.1 驳船控点的施测及精度分析
3.1.1控制点建立
广州仑头—生物岛沉管隧道工程中移动干坞管段制作为例,根据实际需要,首先在驳船甲板两测设置6个控制点(图3.1)。
为了保证制管误差小于 的要求,控制点必须要求很高的精度,点位误差应小于 。通常的放点、放线是达不到这一精度要求的,必须采用严密平差方法求得各坐标点的平面坐标,然后通过归化法对点位进行调整。
由以上计算可看出:
当测角精度远高于测距精度时,应充分利用角度观测量。即使测距有较大误差,依然可以将点位中误差限制在 以内。
4 结论
在驳船上设立坐标系统并实施测量是可行的,为减少误差和便于工作,应采用固定支座和基座。
从理论上讲,后交法可以用于求解各点的仪器姿态,但需要将各测站的基座调整到统一坐标系统。
建立船体坐标系统是一种实用方案,精度可以满足构件制作要求。
参考文献
[1] Moffitt and Bouchard, Surveyiing, 1998,Springer-Verlag
[2] C.Radhakrishna Rao and Helge Toutenburg, Linear Models, 1995, Springer-Verlag
[3] 陈希孺,数理统计引论,1997,科学出版社
猜你喜欢
科技资讯(2017年2期)2017-03-27
山东工业技术(2017年5期)2017-03-16
科技资讯(2016年27期)2017-03-01
科技创新与应用(2017年3期)2017-02-18
中小企业管理与科技·中旬刊(2016年11期)2017-02-17
科技视界(2016年11期)2016-05-23
中国高新技术企业(2015年22期)2015-06-15
环球人文地理·评论版(2014年5期)2014-08-12