基于多特征融合的运动阴影去除算法研究
2015-10-15 02:05曾泽兴曾庆宁蔡晓东王春利
电视技术 2015年3期
曾泽兴,曾庆宁 ,蔡晓东 ,王春利
(桂林电子科技大学 a.信息与通信学院;b.信息科技学院,广西 桂林 541004)
基于多特征融合的运动阴影去除算法研究
曾泽兴a,曾庆宁a,蔡晓东a,王春利b
(桂林电子科技大学 a.信息与通信学院;b.信息科技学院,广西 桂林 541004)
在自动视频监控系统中,阴影是影响目标检测和跟踪的主要因素之一。为了去除阴影的干扰,提出一种区域梯度、颜色和轮廓多特征融合的方法。改进轮廓计算方法,巧妙利用轮廓分割区域,合理使用轮廓填充区域,这些改进使本方法更具鲁棒性和更广适用范围。实验结果表明,该方法在不同场景下可以有效地去除阴影。
阴影去除;特征融合;目标检测;视频监控
GuilinUniversityofElectronicTechnology,GuangxiGuilin541004,China)
自动视频监控的应用,要求在每个场景都能够准确地检测出运动目标。由于阴影的存在,会对目标定位、分割、提取和跟踪带来很多问题[1]。比如,若错误地把阴影当作目标,那么利用形状来识别目标的方法将不再有效。如何把运动目标和目标阴影区分开来,是运动目标检测的一个主要挑战。
1 相关工作
目前对阴影的检测方法有多种,比较常见的有基于颜色、纹理、轮廓等特征。
利用颜色特征的检测方法基于这样的假设[2-3]:被阴影覆盖的区域会变得更暗,但仍保留原来的色度。这些方法实现简单,且耗费时间少。然而,由于基于像素点,很容易受到噪声的干扰[1];更糟糕的是,当目标较暗或者目标颜色与背景颜色相似时,运用颜色特征就很容易出现误检。
纹理相关性是一种有效的检测阴影方法,不依赖于颜色,对光照变化有鲁棒性。 Javed和Shah[4]先通过颜色特征选出候选阴影区域,再分析每个区域的梯度方向, 如果和背景的梯度方向差别不大,就认为该区域属于运动阴影。该方法的缺点在于:通过颜色特征处理,将打破纹理平滑区域,影响后面梯度方向的判断,导致阴影检测率下降。
轮廓特征也可用于去除阴影,文献[5]说明了实现具体方式:首先去除阴影轮廓,然后填充目标内部轮廓,最后实现阴影去除的目的。但是利用这种方法的假设是阴影覆盖区域不能有明显的轮廓,显然这限制了该方法的适用范围。
2 算法的实现
本文利用混合高斯背景模型求出运动前景,一方面基于区域的梯度特征把可能的阴影区域检测出来,并通过颜色特征的进一步处理,把梯度特征错误检出的区域排除。另一方面,充分利用已计算的前景轮廓,对其填充并作为运动目标的一部分。图1为本文算法实现阴影去除流程图。
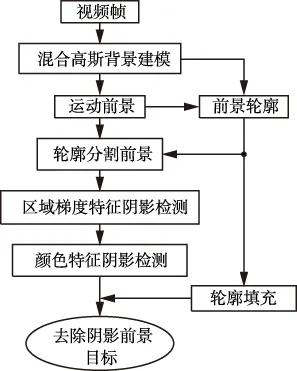
图1 阴影去除流程图
2.1 基于梯度阴影检测
首先计算运动前景的轮廓,利用轮廓对运动前景进行分割,再计算分割出来区域的梯度方向,通过运动前景和参考背景的梯度方向关系判断是否为阴影区域。这样尽可能保留了原有纹理信息,克服文献[4]中打破纹理平滑区域缺点,提高鲁棒性。

(1)
(2)
图像的数据为离散的像素点,可以把图像看成二维离散函数,求图像梯度其实就是对这个二维离散函数进行求导。一个简单的计算方式为
(3)
式中:I(x,y)为图像坐标点(x,y)上的像素值。因为在有些场景下,纹理信息并不是很明显,为了提高检测率,本文在计算梯度时,使用了不同的步长,尽可能获取更多纹理信息,改进后为
(4)
基于区域梯度的主要步骤如下:
1)先求出运动前景的轮廓,并用得到的轮廓对运动前景进行区域分割,记为Mb。

当前帧和背景图像梯度方向的关系可以通过以下公式来估计
(5)
(6)
式中:参数Δθp为当前帧和背景图像在p=(x,y)像素点上的梯度方向差;n为各个候选区域的像素个数。因此,参数d表示当前帧和背景图像梯度方向的相似度,即参数d越大,相似度越高,反之越低。如果d大于阈值τd,则认为该候选区域是阴影区域,把其从运动前景中去除。
2.2 基于颜色阴影检测
HSV颜色空间可以很好地把亮度和色度分离,所以得到了较多的应用。如果满足以下条件,认为是阴影,即
(7)
式中:FC(x,y)和BC(x,y)分别表示在当前帧和参考背景图像的像素点(x,y)上。HSV颜色空间C(取值H、S或V)分量的值。阈值α,β,τS和τH的大小是通过实验经验来设定的。
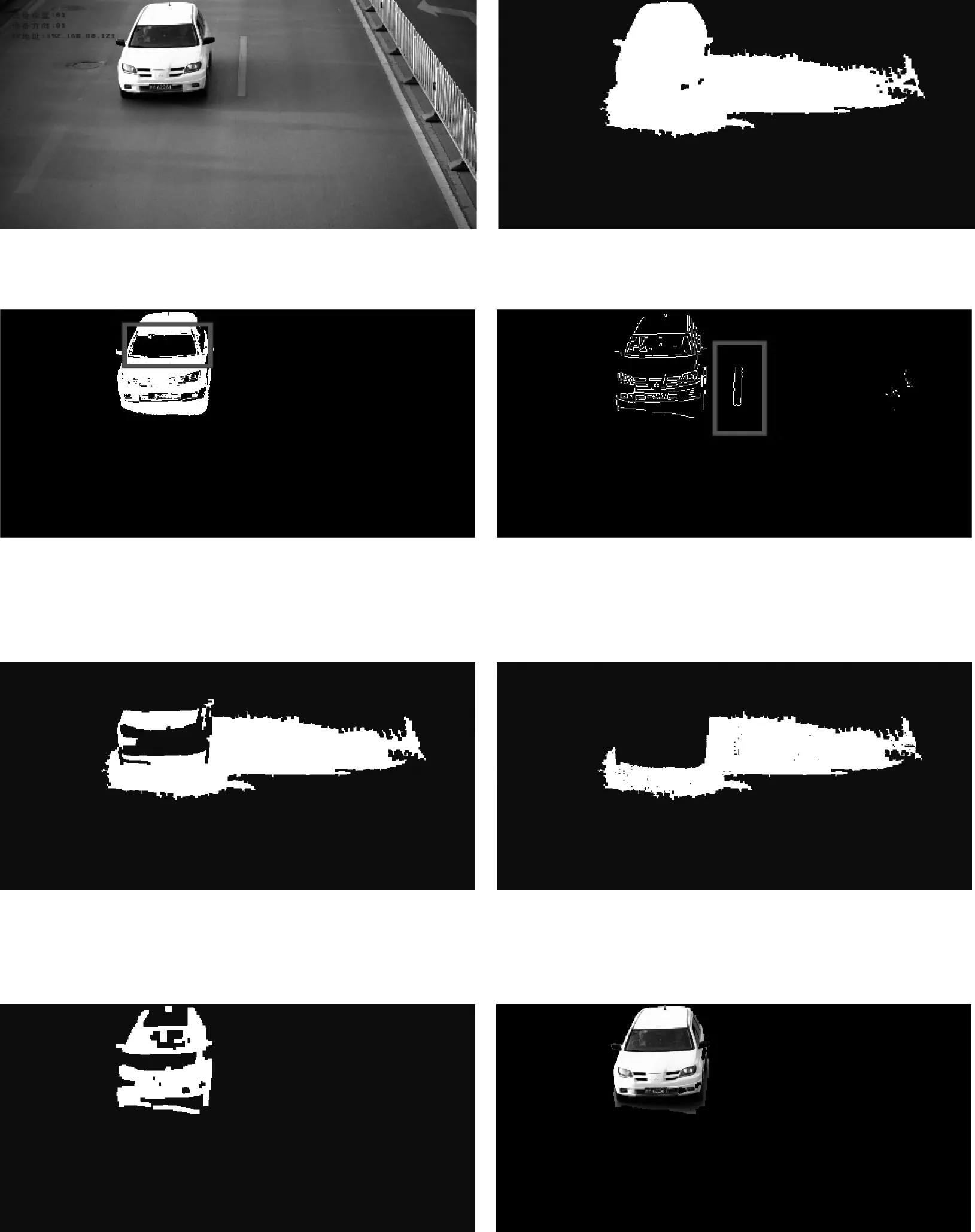
图2 各处理过程
2.3 边缘处理
计算运动前景轮廓:E=EF⊕EB,其中EF,EB分别表示当前帧和参考背景轮廓。之所以不直接用运动前景计算,就是为了避免像文献[5]把阴影覆盖区域的轮廓也包括进去(可以看到图2g没有如图2d中背景轮廓的干扰)。在获取轮廓后,由于只通过内轮廓来重构目标是比较难的,所以本文并没有像文献[5]去填充目标,而是只做简单的形态学处理。颜色特征处理后的运动区域与轮廓填充后的区域两者相加,得到去除阴影后的运动目标区域(图2h)。
3 实验结果及分析
为了系统地估计算法性能,本文通过检测两个重要指标来评价[6]:阴影检测率和阴影识别率。这两个指标阴影检测率η和阴影识别率ξ,分别定义为
(8)
(9)

本文所提方法是对文献[4]和文献[5]的部分借鉴,故与这两种方法做比较。
从表1可看出,本文方法与另外两种方法相比,阴影检测率和识别率都有所提高。克服文献[4]方法在轮廓信息不足时检测率低的问题,提高文献[5]方法对行人阴影检测效果。

表1 各方法阴影检测率和识别率比较结果 %
表2为3种方法分别对3个视频进行处理,统计出的平均每帧时间耗费。从表中可看出,本文方法与文献[4]方法相比,计算量相差不大;与文献[5]相比,本文方法仍然有提高的空间。在一般情况下,本文方法是可以满足实用要求的。
4 小结
针对自动视频监控系统运动目标阴影的检测和去除,本文提出了利用区域梯度、颜色和轮廓多特征融合的方法。本文的创新点在于:巧妙地利用运动目标轮廓进行分块处理,提高算法的鲁棒性;同时在不明显增加计算耗费的前提下,把梯度和轮廓信息有效地融合,提高了算法的适用范围。

表2 各方法耗时比较结果 ms
[1]PRATI A,MIKIC I,TRIVEDI M M, et al.Detecting moving shadows: algorithms and evaluation[J].IEEE Trans.PAMI, 2003, 25(7): 918-923.
[2]CONAIRE C O, O′CONNOR N E,SMEATON A F.Detector adaptation by maximizing agreement between independent data sources[C]//Proc.IEEE Conference on Computer Vision and Pattern Recognition.[S.l.]:IEEE Press, 2007: 1-6.
[3]李静,车进,朱金艳.基于颜色空间转换的运动目标检测与阴影去除[J].电视技术,2013,37(13): 172-175.
[4]JAVED O, SHAH M.Tracking and object classification for automated surveillance[C]//Proc.European Conference on Computer Vision.[S.l.]:IEEE Press,2002:343-357.
[5]PANICKER J V, WILSCY M.Detection of moving cast shadows using edge information[C]//Proc.Computer and Automation Engineering (ICCAE).Singapore: IEEE Press, 2010: 817-821.
[6]PRATI A,CUCCHIARA R,MIKIC I, et al.Analysis and detection of shadows in video streams: a comparative evaluation[C]//Proc.IEEE Conference on Computer Vision and Pattern Recognition.[S.l.]:IEEE Press, 2001: 571-576.
曾泽兴(1987— ),硕士生,主研数字图像处理、人脸识别;
曾庆宁(1963— ),博士,教授,主研语音与图像信号处理、医学信号分析与智能诊断、金融信号分析方法与Markov决策规划;
蔡晓东(1971— ),博士,副教授,主研并行化图像和视频处理、模式识别与智能系统;
王春利(1980— ),硕士,讲师,主研差分方程相关理论。
责任编辑:薛 京
Research on Moving Shadows Removal Algorithm Based on Multi-feature Fusion
ZENG Zexinga, ZENG Qingninga, CAI Xiaodonga, WANG Chunlib
(a.SchoolofInformationandCommunication;b.InstituteofInformationTechnology,
Shadow is one of the major problems in objects detection and tracking for automated video surveillance systems.In this paper, a method fused regional gradients, color and contour feature is proposed to remove the interference of shadows.The calculation method of contour is improved, separated the region skillfully using contour and rationally utilized the contour-filled region.These improvements make the method be more robust and have broader scope.The experimental results show that the method can effectively remove shadows under different scenarios.
shadows removal; feature fusion; objects detection; video surveillance
【本文献信息】曾泽兴,曾庆宁,蔡晓东,等.基于多特征融合的运动阴影去除算法研究[J].电视技术,2015,39(3).
国家科技支撑计划项目(2012BAH20B01);国家科技支撑计划项目(2014BAK11B02);广西自然科学基金项目(2012GXNSFAA053232; 2013GXNSFAA019326);广西高校科学技术研究项目(2013YB092)
TN911.73
A
10.16280/j.videoe.2015.03.028
2014-06-01
猜你喜欢
铁道建筑(2021年11期)2021-03-14
装备制造技术(2020年1期)2020-12-25
文苑(2020年11期)2020-11-19
制造技术与机床(2019年11期)2019-12-04
中国诗歌(2019年6期)2019-11-15
科技风(2019年13期)2019-06-11
现代电子技术(2018年12期)2018-06-12
中国交通信息化(2017年4期)2017-06-06
中学生数理化·八年级物理人教版(2017年11期)2017-04-18
数字技术与应用(2016年6期)2016-07-09