
基于改进型Camshift和卡尔曼滤波器的车辆跟踪算法
2015-10-13 12:34:33马平华徐晓光夏雯娟
井冈山大学学报(自然科学版) 2015年5期
马平华,徐晓光,夏雯娟,陆 涛
基于改进型Camshift和卡尔曼滤波器的车辆跟踪算法
马平华,*徐晓光,夏雯娟,陆 涛
(安徽工程大学,电气工程学院检测技术与自动化装置重点实验室,安徽,芜湖241000)
针对车辆跟踪过程中跟踪目标丢失或者失败的情况,提出一种改进型Camshift(Continuously Adaptive Mean Shift)算法和卡尔曼滤波相结合的跟踪方法。首先,利用卡尔曼滤波器实现跟踪目标的位置估计,以克服目标被遮挡造成的跟踪失败的问题,然后再利用改进型Camshift算法依据目标距离搜索中心的位置,对H分量创建的颜色直方图中的每个像素位进行高斯模型核函数的加权处理,并自适应计算得到最优的搜索窗口,从而改善了传统Camshift不能直接抵制噪声干扰的缺点,解决了因跟踪目标在同色背景噪声干扰下出现的丢失问题。最后通过仿真实验表明:改进型Camshift算法和卡尔曼滤波的结合有效地提高了车辆跟踪的准确性和连续性。
车辆跟踪;Camshift算法;卡尔曼滤波;加权高斯模型核函数
0 引言
在机器视觉领域,通过对车辆的视频序列进行分析,并预测出目标车辆的大小、位置、速度和运动轨迹[1],从而实现有效的目标跟踪,这已成为视频监控和智能交通系统研究的一个重要课题[2]。为应对不同的跟踪环境,近年来,人们提出了Meanshift[3]的跟踪算法,但因其核函数窗宽固定不变[4],因此不能准确定位目标,从而导致跟踪失败。为了解决这些问题,Bradski基于Meanshift算法推导了Camshift算法[5],它通过对视频图像中目标的颜色概率分布图的计算,又以颜色直方图为特征,再使用Meanshift作为演算法,利用Meanshift算法中概率密度梯度爬升的方向来寻找局部最优的搜索窗口,从而实现准确的目标跟踪[6]。
然而,一些特定情况却会导致Camshift算法跟踪失败,例如:跟踪车辆的背景过于复杂,车辆在移动过程中被树木或者其他物体遮挡等等[7]。卡尔曼滤波器是一种高效率的递归滤波器,可以提供有效的状态估计,可以比较精确地预测目标车辆的移动速度和位置[8]。
本文通过Camshift与卡尔曼滤波的组合算法,使用运动车辆的讯息来提高匹配目标的精度。实验表明,这种组合处理的方法,鲁棒性强且高效地实现了跟踪。
1 Camshift算法
Camshift算法[5]的核心是Meanshift算法[3],它是一种基于密度函数梯度的非参数估计,通过迭代搜索,不断匹配概率密度的最优值,从而实现目标跟踪。Camshift算法是Meanshift算法的扩展,可以实现连续目标的运动跟踪,具有自适应调整窗口大小、位置的能力,抗噪性更强。Camshift算法是通过颜色特征来实现目标跟踪的,由于RGB色域在光照亮度变化时比较敏感,所以Camshift算法先将图像从RGB色域先转换到HSV色域,并使用其中的H分量来创建目标的颜色直方图,再得到其反向投影,从而降低光照强度对目标跟踪的影响[9]。
Camshift算法的流程如下[5]:
1)先将跟踪目标视频的第一帧图像从RGB色域转换到HSV色域,并提取H分量。
2)根据选定的区域创建H分量的颜色直方图,其颜色直方图qu可表示为:
其中δ为Kronecker Delta函数,x为第个像素,(x)为第个像素的值。
3)根据颜色直方图qu计算颜色概率分布图pu,即做反向投影。
4)在所选定的区域内,利用Meanshift算法,
计算搜索窗口的质心(xc,yc):
更新搜索窗口的大小:
根据公式(2)~(5)计算出搜索窗口的质心。
5)重复上述的2)~4)步骤,直至收敛为止(即质心位置的偏差值小于阈值范围)。
6)自适应调整搜索窗口。
7)识别新的搜索窗口,并继续进行下一帧的计算。
2 Camshift算法的改进
在现实场景中,由于受到外部环境的噪声影响,前人已经提出过在Camshift算法中引入加权直方图的方法,是在H(色调)分量和S(饱和度)分量的基础上,分别选取不同的系数,或者单独在H分量的基础上进行核函数的简单加权,而本文是通过引入一个高斯模型函数,根据H分量创建的颜色直方图中的每个像素位的可信度不同而进行不同处理,一般而言,距离目标区域中心越远的像素位可信度越低,该像素位受同色背影影响的可能性也越大,这就是普通Camshift算法不能够直接抑制噪声干扰,造成跟踪目标失败的直接原因。所以,本文充分运用位置讯息,利用高斯模型函数对跟踪目标进行轮廓化处理,给予目标邻近中心范围的选取区域更加清晰,有别于最优阈值的处理方法,使越靠近中心的权重值越大,反之,权重值越小。
根据式(1),在其基础上引入加高斯函数,则加权颜色直方图可表示为:
其中wi为加权核函数,本文采用的核函数为单位高斯核函数,满足如下条件:
同时,为了提高选取的准确性,需要对wi高斯模型进行实时更新:
其中,wi,t为当前时刻的加权函数,wi,t-1为前一时刻的加权函数,为更新系数,可取1/,为采样周期。
当x像素位的像素值(x)与选取区域高斯函数的均值不匹配时,即|b(xi)-ui|<2.5σi时(其中为w的均值,σi2为w的协方差),就用公式(8)对区域内高斯模型权重小的那些模型进行更新,用新的高斯模型进行替代,从而对区域的轮廓选取更加容易。
下面给出采用Meanshift算法、传统Camshift算法和引入高斯模型核函数的改进型Camshift算法分别对同一视频跟踪的精度误差图:
由图1可以看出,Meanshift算法误差最大,这是因为它没有采用H通道分量建立颜色直方图,对光线颜色等比较敏感,核函数的窗宽又固定不变,而传统的Camshift算法相对于Meanshift算法而言,窗宽可以自适应调节,跟踪精度有所提升,但对比引入高斯模型核函数的改进型Camshift算法,它又缺少加权高斯核函数,无法抵制无关噪声的干扰,因此跟踪精度还是相对较低。

图1 不同跟踪算法的精度误差图
3 改进型Camshift与卡尔曼滤波相结合的车辆跟踪算法
在一般环境下,改进型Camshift算法即能够实现很好的目标跟踪结果,但由于它不会对任何运动对象做出相应的预测,在复杂条件下不能解决跟踪目标被遮挡或目标移动太快导致跟踪失败等问题。因此,本文选用卡尔曼滤波器来估计目标位置,提升跟踪精度。卡尔曼滤波[10]又称最小方差线性递推滤波,可在及时测量的讯息中去除随机噪声和无用信息,利用目标的动态特征,得到目标位置的最优估计。
定义系统的状态向量Xk=[x,y,vx,vy]T,观测向量Zk=[x,y]T,和v表示目标在水平方向的位置和速度,和v表示目标在垂直方向的位置和速度,为卡尔曼滤波预测的状态向量。再定义系统的状态转移阵:
上式中为采样时间间隔,即相邻帧数差,故取1。
由定义得到观测矩阵Hk,另取动态噪声和检测噪声的相关协方差矩阵Qk和Rk分别为:
如图2所示,改进型Camshift与卡尔曼滤波组合跟踪算法实现步骤如下:
1)输入视频,初始化搜索窗口;
2)通过卡尔曼滤波器估计下一时刻目标可能出现的位置;
3)利用改进型Camshift算法在预测的范围内确定最终的目标位置。如果这次搜索是成功的,则跟踪的结果将被视为卡尔曼滤波的观测值来估计下一刻的目标。若未成功,则把预测值直接用于估计下一时刻的位置。
这样,就可以利用匹配目标的位置作为卡尔曼滤波的观测值,不断更新状态值,提高目标跟踪精度。
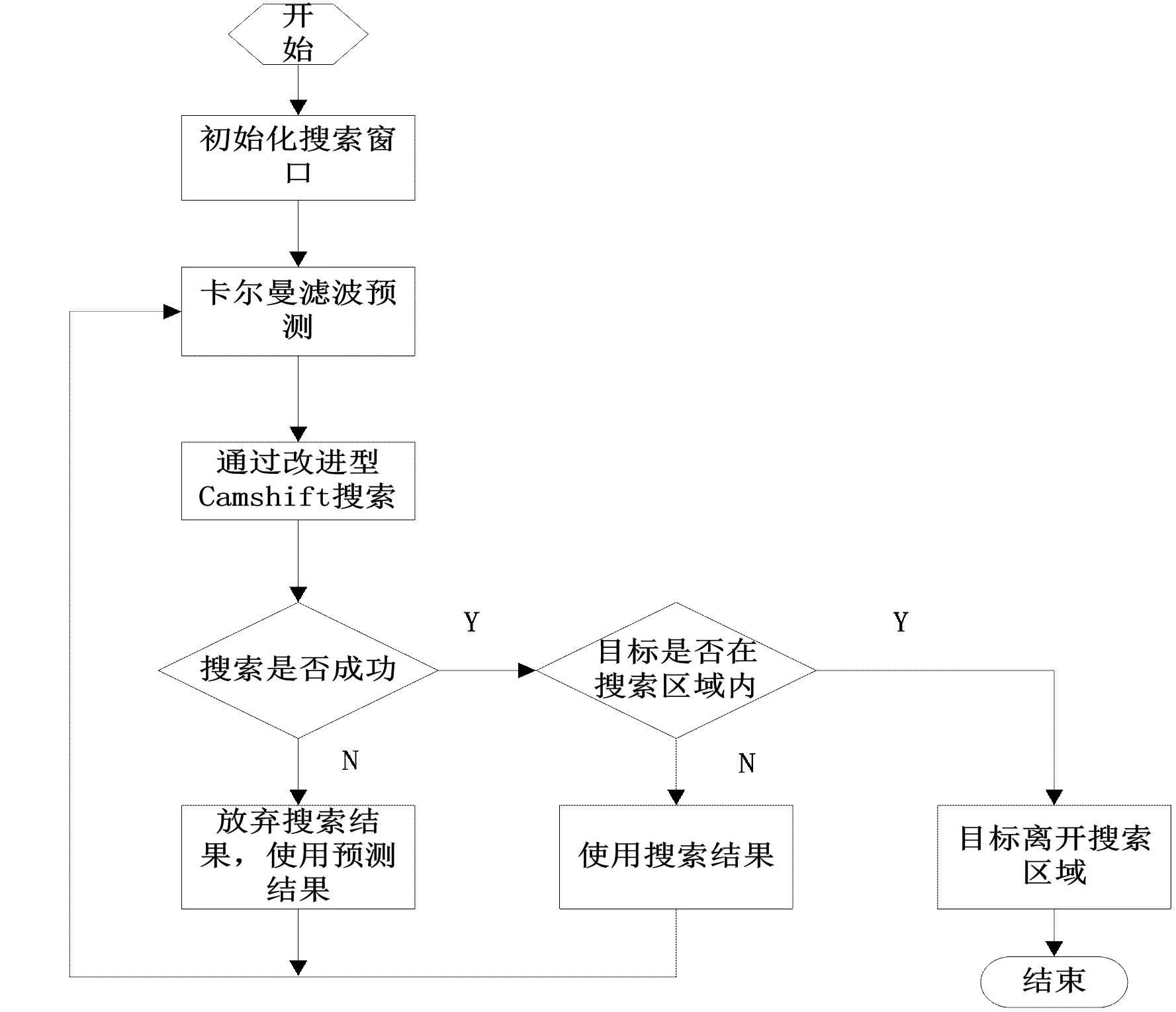
图2 改进型Camshift与卡尔曼滤波组合跟踪算法方框图
4 实验和结果分析
4.1 高斯模型核函数加权颜色直方图
通过改进型Camshift算法,增加了高斯模型的核函数,进行了加权处理,使得背景颜色的干扰权重变弱,如图3所示为原始图像,图4为传统Camshift算法的颜色概率分布图(即作反投影),图5为改进型Camshift算法的颜色概率分布图(即引入高斯模型核函数的反投影)。

图3 原始图像
图4传统算法的反投影
Fig. 4 Back projection of traditional algorithm

图5改进型算法的反投影
Fig. 5 Back projection of improved algorithm
4.2 改进型Camshift与卡尔曼滤波器的组合算法
根据本文提出的组合算法,为验证其有效性,采用二组车辆高速公路上实际行驶的视频序列,再利用OpenCV配合Visual Studio 2010在Win7平台(CPU:Intel G2030 3.0GHz内存:2GB)上进行实验。

图6 车辆变道组图

图7 黑色车辆经过高架桥底部
如图6所示,这四张组实验图是车辆在变道时,车辆因为视角晃动,可能被前后车辆所遮挡;如图7所示,黑色车辆经过高架桥底部时,因为暂时光线被遮挡,而造成同色背景干扰。综上所述,由于采用了改进型Camshift和卡尔曼滤波器相结合的算法,很好的克服了噪声干扰。
5 结论
本文利用一种改进的Camshift与卡尔曼滤波器相结合的算法实现了对运动车辆的检测与跟踪。首先讨论了传统Camshift的原理,然后在其基础上引入了高斯模型核函数从而改进了Camshift算法,再利用嵌入卡尔曼滤波器,通过预测搜索窗口来寻找目标的中心位置。最后使用组合算法,通过实验得知,该算法跟踪目标,具有很高的鲁棒性和可行性。
[1] Li Y C, Sun P. The Design of Embedded Video-Based Vehicle Tracking System[C].Digital Manufacturing and Automation (ICDMA), 2013 Fourth International Conference on. IEEE, 2013: 1437-1440.
[2] Abrougui K, Boukerche A. Efficient group-based authentication protocol for location-based service discovery in intelligent transportation systems[J]. Security and Communication Networks, 2013, 6(4): 473-484.
[3] Cheng Y. Mean shift, mode seeking, and clustering[J]. Pattern Analysis and Machine Intelligence, IEEE Transactions on, 1995, 17(8): 790-799.
[4] 孙凯,刘士荣. 多目标跟踪的改进 Camshift/卡尔曼滤波组合算法[J]. 信息与控制, 2009, 38(1): 9-14.
[5] Bradski G R. Computer vision face tracking for use in a perceptual user interface[J]. Intel Technology Journal, 1998, 2(2):1~15.
[6] 李明锁,井亮,邹杰,等.结合扩展卡尔曼滤波的 CamShift 移动目标跟踪算法[J]. 电光与控制, 2011, 18(4): 1-5.
[7] Wu H H, Zheng X S. Improved and efficient object tracking algorithm based on Camshift[J]. Comput Eng Appl, 2009, 45(27): 178-180.
[8] Huang S, Hong J. Moving object tracking system based on camshift and Kalman filter[C].Consumer Electronics, Communications and Networks (CECNet), 2011 International Conference on. IEEE, 2011: 1423-1426.
[9] Allen J G, Xu R Y D, Jin J S. Object tracking using camshift algorithm and multiple quantized feature spaces [D]. Sydney: University of Sydney, 2006.
[10] Jang D S, Kim G Y, Choi H I. Kalman filter incorporated model updating for real-time tracking[C].TENCON'96. Proceedings., 1996 IEEE TENCON. Digital Signal Processing Applications. IEEE, 1996, 2: 878-882
VEHICLE TRACKING SYSTEM BASED ON IMPROVED CAMSHIFT ALGORITHM AND THE KALMAN FILTER
MA Ping-hua,*XU Xiao-guang, XIA Wen-juan, LU Tao
(Anhui Polytechnic University,Detection technology and Automation Key Laboratory of the College of Electrical Engineering, Wuhu, Anhui 241000, China)
In the process of vehicle tracking, a new tracking algorithm that combines the improved Camshift and the Kalman filter has been proposed when tracking target loss or failure. Firstly, the Kalman filter is used to estimate the target position in order to overcome the cover of target. We use an improved Camshift algorithm based on the distance of search center to weight every pixel with Gauss model core function in color histogram created by H component. We also achieve the optimal search window by self-adaptive calculation and improve traditional Camshift shortcoming which is powerless for directly resistance noise under the same color background. Finally, the simulations and experiments show that the method improves the accuracy and continuity of vehicle tracking.
vehicle tracking; camshift algorithm; kalman filter; weighted Gauss model core function
1674-8085(2015)05-0060-06
TP391
A
10.3969/j.issn.1674-8085.2015.05.012
2015-05-07;修改日期:2015-07-09
安徽省高校省级自然科学研究项目(KJ2014A024)
马平华(1987-),男,江苏南京人,硕士生,主要从事先进传感与检测技术研究(E-mail:bjmph15@qq.com);
*徐晓光(1972-),男,安徽明光人,副教授,硕士生导师,主要从事自动化方向和信息融合研究(E-mail:16089922@qq.com);
夏雯娟(1990-),女,江苏泰州人,硕士生,主要从事运动控制系统的分析和设计研究(E-mail:1770396516@qq.com);
陆 涛(1991-),男,江苏南通人,硕士生,主要从事智能信息处理与应用研究(Email:1065547303@qq.com).
猜你喜欢
高中数理化(2024年1期)2024-03-02 17:52:40
湘潭大学自然科学学报(2022年2期)2022-07-28 05:26:40
一重技术(2021年5期)2022-01-18 05:42:08
摄影之友(影像视觉)(2018年12期)2019-01-28 09:01:02
测控技术(2018年4期)2018-11-25 09:47:14
北京航空航天大学学报(2017年9期)2017-12-18 07:12:25
电源技术(2016年9期)2016-02-27 09:05:39
电源技术(2015年1期)2015-08-22 11:16:28
计算机工程(2015年8期)2015-07-03 12:20:21
电机与控制应用(2015年2期)2015-03-01 03:49:22
