静态星模拟器设计与精度分析
2015-10-12 02:18:30孙高飞张国玉刘石王琪王凌云高玉军
长春理工大学学报(自然科学版) 2015年5期
孙高飞,张国玉,刘石,王琪,王凌云,高玉军
(1.长春理工大学 光电工程学院,长春 130022;2.吉林省光电测控仪器工程技术研究中心,长春 130022;3.中国科学院长春光学精密机械与物理研究所,长春 130022)
静态星模拟器设计与精度分析
孙高飞1,2,张国玉1,2,刘石1,2,王琪1,王凌云1,2,高玉军3
(1.长春理工大学光电工程学院,长春130022;2.吉林省光电测控仪器工程技术研究中心,长春130022;3.中国科学院长春光学精密机械与物理研究所,长春130022)
为了实现对星敏感器进行的地面标定和精度测试,研制高精度静态星模拟器,要求模拟器的星间角距精度优于10″。利用激光直写技术制作星点分划板,将其作为核心显示器件来模拟星图,设计准直光学系统实现无穷远距离和角度模拟,并通过优化像差保证模拟星点的成像质量。同时,提出星点位置修正方法以改善由于焦距测不准和光学系统相差带来的星图模拟误差。实验结果表明:经过修正的星图,单星位置模拟精度优于10″,可以作为地面标定与测试装置,供星敏感器进行观测。
星模拟器;星图模拟精度;光学系统;星点位置;星敏感器
星模拟器作为星敏感器的地面测试设备,随着星敏感器的迅猛发展,对星模拟器也提出了更高的要求。星模拟器按星图显示方式不同分为静态星模拟器和动态星模拟器。静态星模拟器模拟精度高,但星图显示单一,不能变化,多用于星敏感器的性能测试。动态星模拟器模拟精度低,但星图显示多样,可实现星图连续模拟,多用于星敏感器的功能测试[1-4]。
本文研究的静态星模拟器用于产生较大空间尺度的模拟星图,可在实验室条件下作为星敏感器的目标源[5-8],以供其完成恒星识别、姿态确定、极性检查等工作,实现对星敏感器的性能测试,要求星图模拟精度优于10″。
1 静态星模拟器的组成
静态星模拟器主要由光源、准直光学系统组件、星点分划板组件、电控部分组件(含电源和线路盒)、立式调整机构等组成。静态星模拟器的工作原理与组成如图1所示。

图1 静态星模拟器的工作原理与实物照片图
由光源发出的光线照亮位于准直光学系统焦平面上,刻有若干个透光微孔的星点分划板,形成模拟星点。由模拟星点产生的光线经准直光学系统后,以平行光形式射出,在星敏感器的入瞳处形成一幅完整的星图,即实现了对星图的模拟。其中,固定天区星图中,单星张角和星对角距利用星点分划板上刻有多个微小透光微孔来模拟;星等通过照明光源和调节光源的发光亮度来模拟;无穷远处星光的模拟由准直光学系统来实现。
2 光学系统设计
恒星的无穷远距离依靠光学系统设计实现。采用准直光学系统,将星点分划板置于焦平面位置,则星光矢量以平行光的形式出射,从而实现无穷远恒星距离模拟。为了保证模拟星图视场内,所有星点成像清晰且位置准确,设计的准直光学系统应具有畸变小、场曲小且复消色差的特点。另外,为了确保星模拟器与星敏感器对接使用时,星模拟器的能量能够被星敏感器准确接收,还应考虑两个系统间的参数匹配与能量衔接。
静态星模拟器的光学系统设计参数如表1所示。实际设计的系统像差曲线如图2至图4所示。
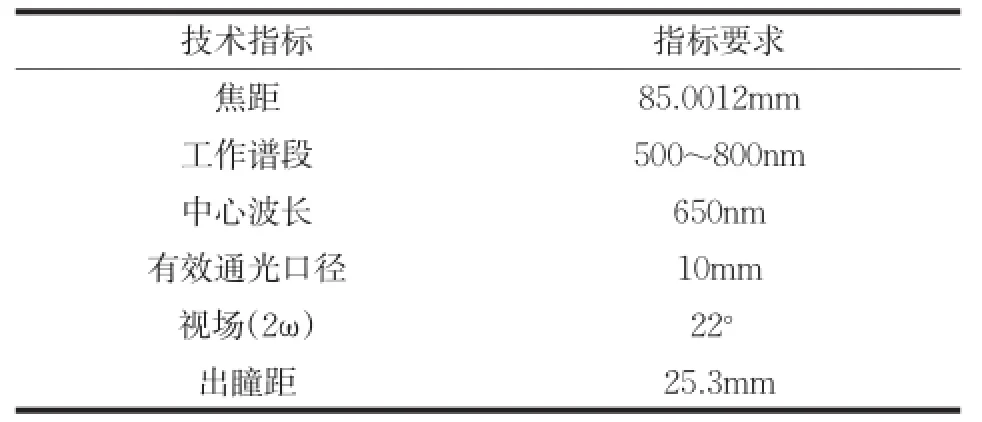
表1 准直光学系统的主要技术指标

图2 横向(垂轴)象差曲线

图3 轴向色差、球差曲线
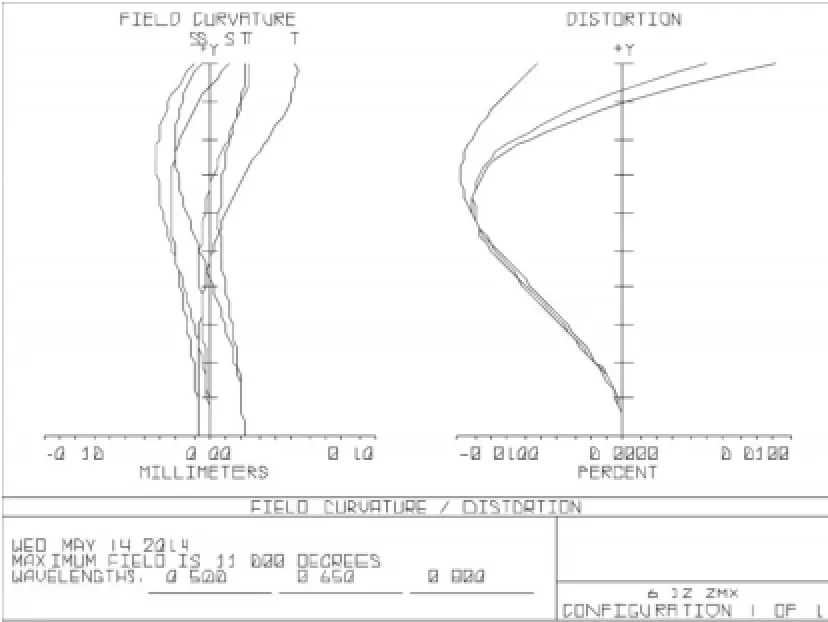
图4 场曲和畸变象差曲线
图2为光学系统的横向(垂轴)象差曲线,全视场内最大值为±20μm;图3为光学系统的轴向色差、球差曲线,全视场内优于0.05mm;图4为光学系统的场曲和畸变曲线,全视场内场曲优于±0.06mm,畸变优于±0.01%。
3 星点分划板设计
星模拟器星点分划板上的星点,经由光学系统后形成星光矢量。表2所示为通过星光矢量来约束星点板上的星点位置。其中,方位角和俯仰角为各个星点相对于空间坐标系的位置,可由天区星表查得;星点理论直角坐标是根据光学系统设计的视场和焦距,利用星点位置计算公式求得。
由于星点分划板存在自身的制造误差和安装误差,同时受机械系统的加工误差和装配误差、光学系统的加工误差、装配误差以及像差(包括畸变、能量中心与主光线位置偏差、球差、彗差和场曲)等影响,导致计算的星点理论直角坐标位置存在位置误差。另外,星敏感器与星模拟器对接时,还存在光轴衔接相对误差、微调装置的调整误差等。

表2 静态星模拟器星图星点位置值
4 实验结果与数据分析
由于星点分划板的位置误差导致的星模拟器星图模拟精度偏差,且无法在星点分划板制作时避免,只能在星模拟器测试阶段,通过大量测试数据,建立修正模型予以消除[9]。
针对MN星敏静态星模拟器的星图模拟精度进行测试,利用TM6100型经纬仪对装有新的星点分划板的微型星敏静态星模拟器进行测试。利用式(2)计算天区星图中各星点的理论星间角距值和实测星间角距值。

式中,αi为经纬仪测试的第i个星点的方位角度值;αj为经纬仪测试的第 j个星点的方位角度值;di= 90°-bi,bi为经纬仪测试的第i个星点的俯仰角度值;d2=90°-bj,bj为经纬仪测试的第 j个星点的俯仰角度值。
理论星间角距值与实测星间角距值之差,即为星图模拟误差。通过对同一块星点分划板的20次重复测量,剔除粗大误差后,以其中一点为例,得到单点误差分布图如图5(a)所示。同理,对其余星点进行测试,并得到星图中所有星点的误差分布图,如图5(b)所示。
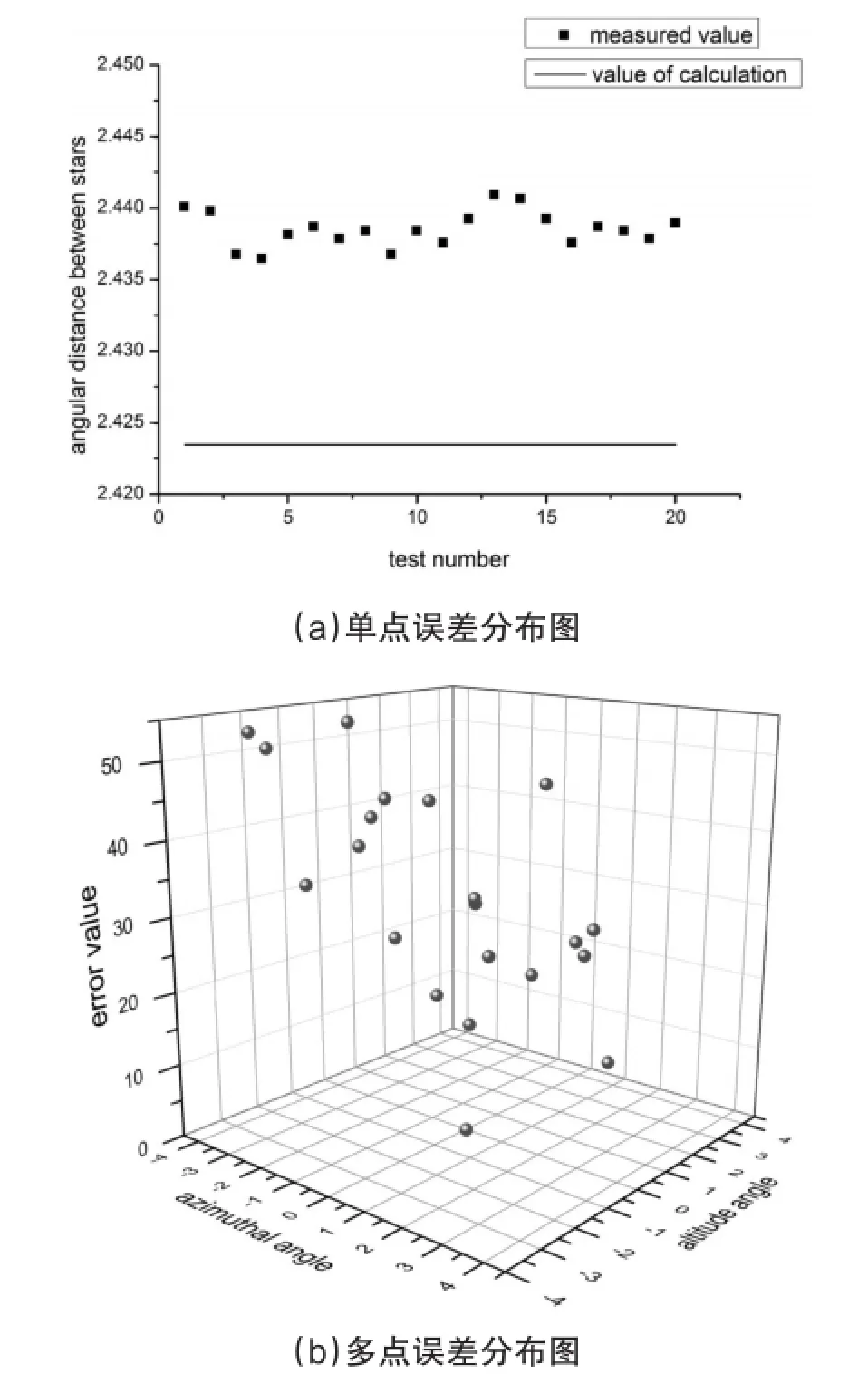
图5 误差分布图
根据误差分布图,建立修正模型如式(1)所示,重新计算星点的直角坐标(Ui实,Vi实)位置并制作星点分划板。

式中,f设为准直光学系统设计的焦距;θi设为根据式(2)计算的星间角距设计值;θi实为根据式(2)计算的星间角距实测值;KU为星点在U轴坐标位置的经验修正值;KV为星点在V轴坐标位置的经验修正值;Kf为实测焦距的经验修正值。
利用经纬仪对修正后的星点分划板进行测试,并通过式(1)计算星间焦距实测值,得到星图模拟误差分布图,如图6所示。

图6 星点位置误差图
从图中可以看出,所有星点的星间角距精度优于10″,满足技术指标要求,该模拟器可以作为地面观测目标为微型星敏感器提供高精度恒星模拟图像。
5 结论
本文从星敏感器地面标定与测试设备的要求出发,设计了一种星图模拟精度优于10″的静态星模拟器。首先,介绍了系统的组成和工作原理;然后,研究高精度准直光学系统的设计方法,并用ZEMAX软件设计光学系统,通过星点分划板作为星图显示器件,实现了星图模拟;最后,提出星点位置修正方法,改善了星图模拟精度。由此完成了星图模拟精度优于10″的静态星模拟器研制,可供星敏感器进行地面测试与精度标定。
[1] 屠善澄.卫星姿态动力学与控制(3)[M].北京:宇航出版社,2003:122-183.
[2] 刘一武,陈义庆.星敏感器测量模型及其在卫星姿态确定系统中的应用[J].宇航学报,2003,24(2):162-167.
[3] 孙高飞,张国玉,姜会林,等.甚高精度星模拟器设计[J].光学精密工程,2011,19(8):1730-1735.
[4] 李学夔,谭海曙,李杰.利用星角距对星敏感器主距进行标定的新方法[J].半导体光电,2009,30(5):755-759.
[5] 魏新国,张广军,樊巧云,等.利用仿真星图的星敏感器地面功能测试方法[J].红外与激光工程,2008,37(6):1087-1091.
[6] 赵晨光,谭久彬,刘俭,等.用于天文导航设备检测的星模拟装置[J].光学精密工程,2010,18(6):1326-1332.
[7] 李春艳,李怀锋,孙才红.高精度星敏感器天文标定方法及观测分析[J].光学精密工程,2006,14(4):558-563.
[8] 李志来,薛栋林,张学军.长焦距大视场光学系统的光机结构设计[J].光学精密工程,2008,16(12):2485-2490.
[9] 苗健宇,张立平,吴清文,等.测绘相机光学镜筒设计、加工及装配[J].光学精密工程,2008,16(9):1648-1653.
Design of Static Star Simulator and Accuracy Analysis
SUN Gaofei1,2,ZHANG Guoyu1,2,LIU Shi1,2,WANG Qi1,WANG Lingyun1,2,GAO Yujun3
(1.School of Optoelectronic Engineering,Changchun University of Science and Technology,Changchun 130022;2.Optical Measurement and Control Instrumentation,Jilin Province Engineering Research Center,Changchun 130022;3.Changchun Institute of Optics,Fine Machines and Physics,Chinese Academy of Sciences,Changchun 130033)
In order to realize the ground of star sensor calibration and test accuracy,developing high precision static star simulator,required the star angular distance between the precision of simulator is better than 10".Star reticle,using laser direct writing technique to simulate the map as a core display device,design of collimation optical system to realize simulate infinite distance and angle,and through the optimization of aberration guarantee simulation object in image quality.At the same time,the star position correction method is proposed to improve the focal length of uncertainty and the optical system are map simulation error.The experimental results show that the revised chart,single location simulation precision is better than 10",can be used as a calibration and test equipment on the ground,for star sensor.
star simulator;simulation accuracy for star map;optical system;star position;star sensor
V524.7TH74
A
1672-9870(2015)05-0026-04
2015-05-24
孙高飞(1985-),女,博士,讲师,E-mail:51579428@qq.com
猜你喜欢
作文大王·笑话大王(2023年8期)2023-07-17 04:09:28
数学物理学报(2022年2期)2022-04-26 14:07:54
数学物理学报(2022年1期)2022-03-16 06:15:00
空间科学学报(2020年3期)2020-07-24 09:23:28
现代装饰(2019年7期)2019-07-25 07:42:20
测绘科学与工程(2017年4期)2017-05-25 01:48:16
贵州师范学院学报(2016年6期)2016-02-27 12:47:52
湖北民族大学学报(自然科学版)(2015年2期)2015-12-09 02:35:28
大地测量与地球动力学(2015年5期)2015-02-15 01:06:28
测绘科学与工程(2014年3期)2014-02-27 07:06:00