基于状态反馈线性化的矩阵变换器非线性控制
2015-09-19 00:31:08潘月斗陈继义
电力自动化设备 2015年5期
潘月斗,郭 凯,陈继义,徐 杰
(北京科技大学 自动化学院,北京 100083)
0 引言
矩阵变换器MC(Matrix Converter)是一种复杂的柔性电力电子变换器,具有体积小、功率因数高等优点,在交-交变换领域具有广泛的发展前景[1-3]。
矩阵变换器由于省略了中间储能环节,输出电流性能非常容易受到输入电压畸变、三相负载不对称等非正常工况的影响[4]。针对上述问题,文献[5]提出一种新的非正常输入电压表示方法以及抗扰分量的概念,通过在整流调制矢量中引入抗扰分量来提高双级矩阵变换器的输出波形质量,但是低次谐波较多。文献[6]采用输入电压不平衡补偿的双电压合成控制方法,通过输入电流调制策略进行控制,但是缺乏负载失衡条件下的仿真实验验证,仅对电网不对称进行了理论分析和仿真。文献[7]提出了一种考虑输入线电压干扰的补偿算法,系统的控制律十分复杂,涉及指数运算,不适合在线控制,且全文仅对线电压干扰进行了仿真分析和实验,对负载电机的参数变化没有加以实验验证。文献[8]采用输出电压前馈补偿策略来改善矩阵变换器在非正常工况下的输出性能,但是开关频率不固定,且算法较复杂,不易实现。文献[9]引入了非线性控制中的无源性理论,建立了矩阵变换器的输出端数学模型,采用重新分配系统能量和阻尼使系统达到预期的效果。文献[10]建立了矩阵变换器输出端欧拉-拉格朗日无源控制模型,设计出控制器,提高了系统的动态性能。
分析上述控制方法的优势和不足,本文首先建立了矩阵变换器输出端的仿射非线性模型,然后通过坐标变换,得到dq坐标下的数学模型,通过状态反馈线性化将其转化成线性系统,得到新的状态变量。在设计出状态变量后,最后进行控制器的设计,实现对矩阵变换器的输出电流控制。由于反馈线性化与传统的利用泰勒级数展开的近似线性化不同,在线性化的过程中没有忽略任何高阶项,是精确且全局的线性化,因此状态反馈线性化和传统的控制方法相比能取得更好的控制效果。
1 矩阵变换器模型建立
本文选取的三相-三相矩阵变换器由9个双向开关组成,每个开关具有双向导通和关断的功能,其拓扑结构如图 1所示[11-13]。
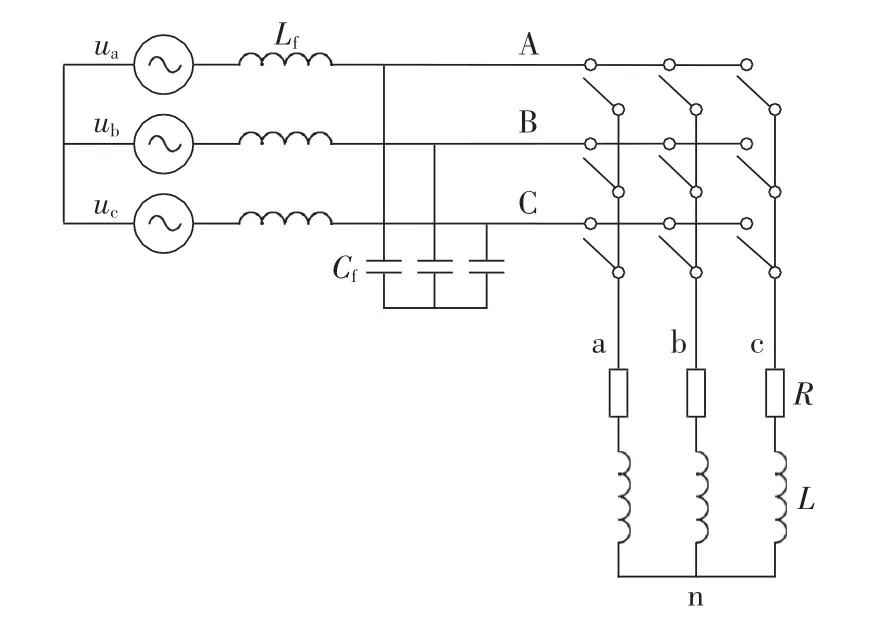
图1 9开关矩阵变换器拓扑结构Fig.1 Topology of 9-switch MC
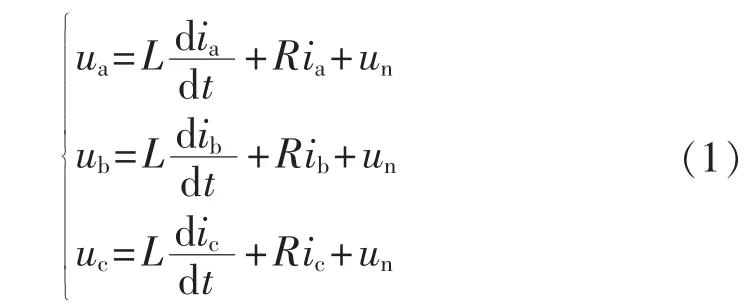
图中,输出端电阻为 R,电感为 L;ua、ub、uc为矩阵变换器输出端的a、b、c相的电压。令un为三相负载中心的相电压;ia、ib、ic为负载上 a、b、c 三相的电流。则矩阵变换器输出侧的电压方程为:
对式(1)进行变换,引入 Park 变换矩阵[14-15]:
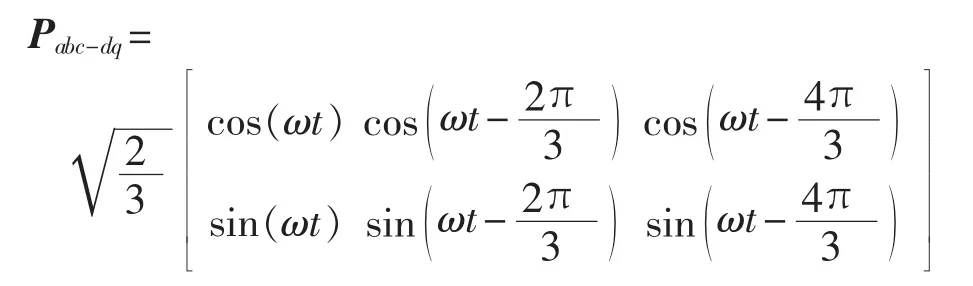
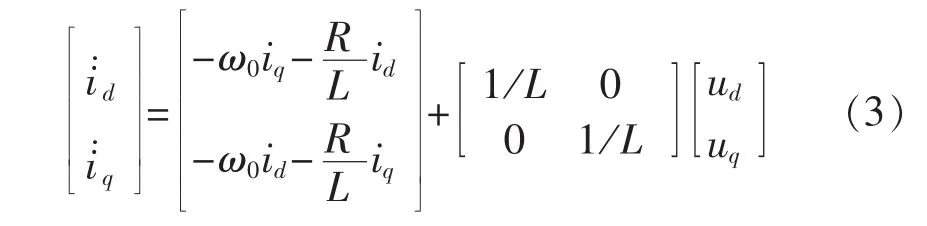
ω取期望的输出角频率ω0,则从a、b、c三相转化成d、q两相,可以得到:

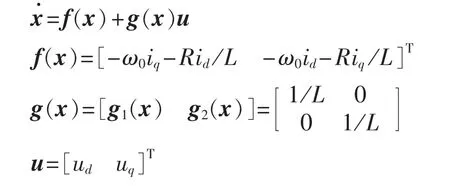
将式(2)整理成仿射非线性系统的标准形式:
即有:
2 系统的相对阶和精确线性化判断
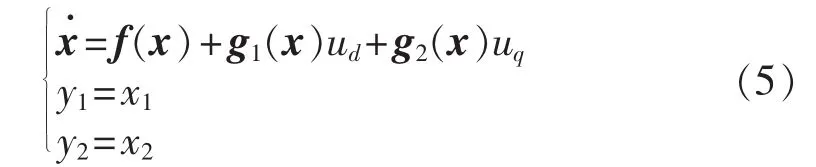
式(3)为系统的状态方程,为了得到一个完整的系统,构建输出方程:

完整的仿射非线性系统为:
针对上述仿射非线性系统,求出该系统的相对阶:
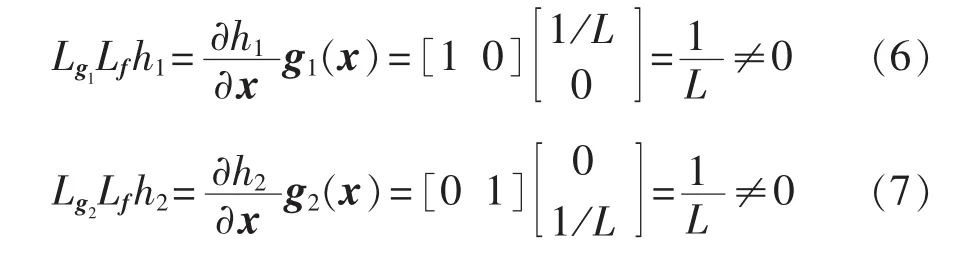
其中,Lg1为输出函数 h1对矢量场 g1(x)的导数;Lg2为输出函数h2对矢量场g2(x)的导数;Lf为输出函数h对矢量场 f(x)的导数。
从式(6)、(7)可以看出,系统的相对阶 r=r1+r2=1+1=2,而系统的阶次n=2,所以r=n。
根据式(5)可得系统的2个矢量场集合:
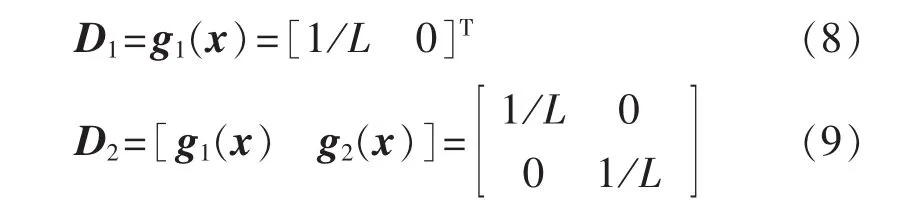
其中,D2为非奇异的,且D1、D2是对合的,系统满足可精确线性化的2个条件,因此该系统可以进行状态反馈线性化[18-19]。
3 矩阵变换器的非线性控制器设计
矩阵变换器的状态反馈线性化系统的结构框图如图 2所示[20]。
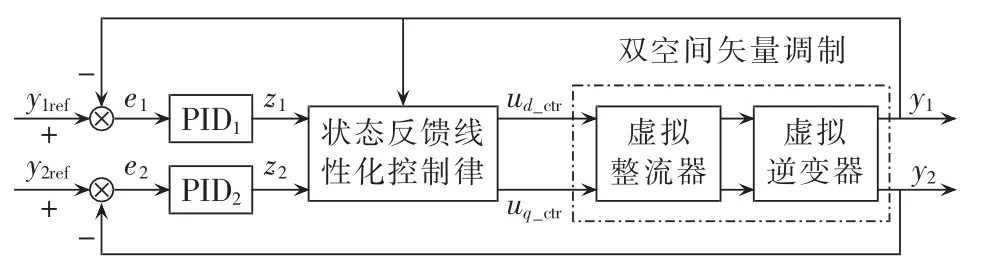
图2 矩阵变换器的状态反馈线性化系统结构框图Fig.2 Structural diagram of state feedback linearization system of MC
基于状态反馈线性化理论的矩阵变换器控制器的设计步骤如下。
用 z1、z2代替 y1、y2,则式(3)可以化为:
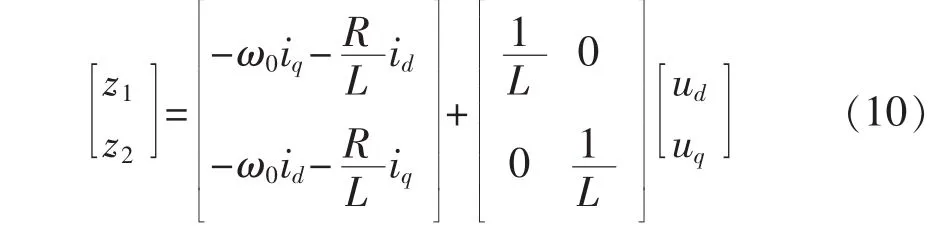
整理式(10)得:
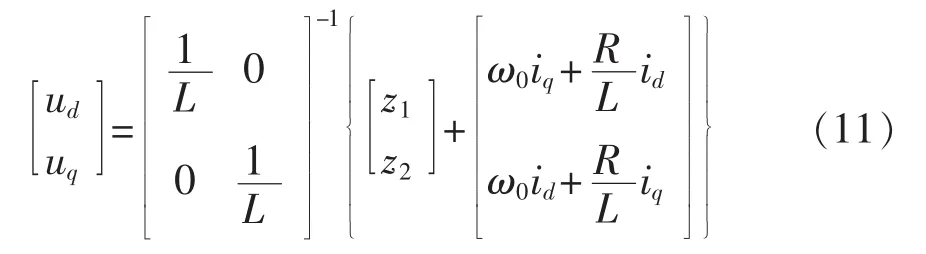
计算后可得:

将式(12)代入式(3)中,可得:

因此,当控制器为式(12)时,经坐标变换后得到新线性系统即为式(13),显然系统由一个非线性系统转化成一个简单的线性系统,控制器设计完毕。
为了实现输出电流的跟踪控制,同时考虑到系统参数可能对系统偏差造成影响,新的控制量可以按照下式进行选取:
其中,y1ref、y2ref分别为 y1、y2的期望值。
整理式(14),可得:


由式(14)和式(16)可以看出,调整式(14)中的kij(i=1,2;j=1,2,3),就可实现系统跟踪误差趋于零,保证系统的精确性和稳定性。
4 控制系统仿真
为了验证系统的正确性和有效性,利用MATLAB/Simulink进行仿真实验。矩阵变换器采用双空间矢量调制策略,该策略将矩阵变换器分成整流和逆变2个环节。状态反馈线性化控制器的控制量id、iq作为虚拟整流环节的输入相电流矢量。虚拟逆变环节的调制量由输出线电压空间矢量结合设定的输出频率得到,然后对虚拟逆变环节进行调制,最后将虚拟整流和逆变环节相结合得出矩阵变换器的开关组合。
矩阵变换器的开关器件采用理想的开关模型,矩阵变换器的具体参数为:电压源电压为220 V;输入频率f=50 Hz;输入侧电感Lf=1 mH,输入侧电容Cf=20 μF;输出侧电阻 R=5 Ω;输出侧电感 L=15 mH;输出频率f0=10 Hz;输出功率Pout=1000 W。
由图2可知,本次仿真要调整的参数为2个PID模块中的6个参数,选取:d轴上的增益k11=3000、k12=30、k13=2;q 轴上的增益 k21=2380、k22=20、k23=0。
下面针对三相输入电压不对称和三相负载不对称2种情况进行仿真。
4.1 三相输入电压不对称情况
三相不平衡输入电压分别为:ua=200sin(ωt),ub=220sin(ωt-140°),uc=220sin(ωt-240°)。该情况下的仿真结果如图3所示,图中分别为id、iq的设定值。
当输入电流为正弦波时,电流的有功分量为电流幅值,无功分量为零。从图3中可以看出,id、iq的跟踪效果很好,两者均在0.02 s前达到设定值,id的稳态误差小于0.2 A,iq的稳态误差小于0.1 A。变频后的三相电流也有较好的波形。从a相电流的谐波分析图可以看出a相电流的谐波含量为0.26%,谐波很小。
同样的输入电压下,未采用反馈线性化方法时的输出电流如图4所示。
由图4可见,未采用状态反馈线性化控制方法时的输出侧电流波形出现不对称,并且电流波形出现畸变,谐波含量较高,对电流的控制结果没有状态反馈线性化控制方法好。
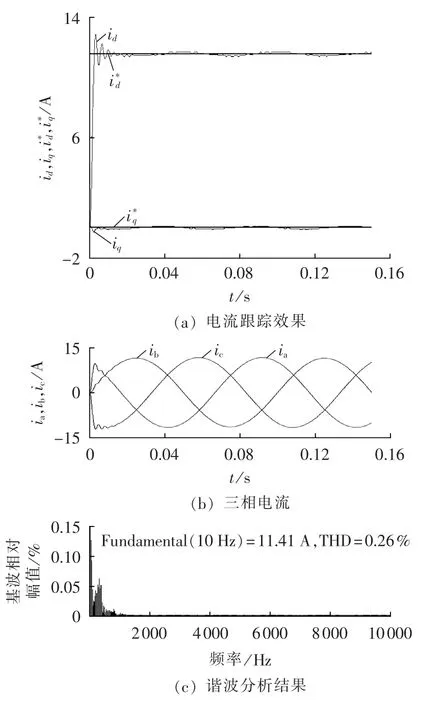
图3 三相输入电压不对称时MC的输出电流和a相谐波分析结果Fig.3 MC output current waveforms and phase-a harmonic current spectrum when three-phase voltage inputs are asymmetrical
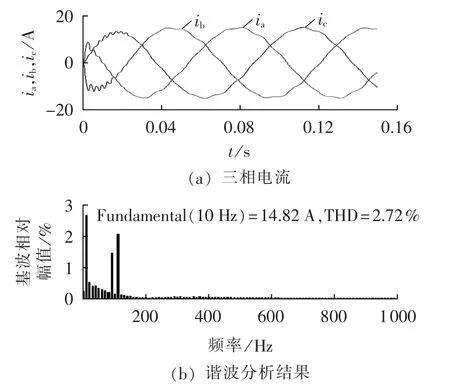
图4 未采用设计的控制器情况下,三相输入电压不对称时MC的输出电流及谐波分析结果Fig.4 Output currents and harmonic current spectrum of MC without designed controller when three-phase voltage inputs are asymmetrical
4.2 三相负载不对称情况
令三相负载为:Ra=6 Ω,Rb=5 Ω,Rc=5 Ω;La=15 mH,Lb=15 mH,Lc=17 mH。此时负载不对称,系统的仿真结果如图5所示。

图5 三相负载不对称时MC的输出电流和a相谐波分析结果Fig.5 MC output currents and phase-a harmonic current spectrum when three-phase loads are asymmetrical
由图5可知,在三相电阻、电感均不平衡时,跟踪电流id、iq依然能够快速地趋于设定值,稳态误差均在0.2 A以内。a相的谐波含量为0.28%,含量很小。仿真结果说明在负载不平衡时,系统有良好的调控效果。
未采用反馈线性化方法情况下,负载不对称时矩阵变换器的输出电流及其谐波分析结果如图6所示。
由图6可见,未采用状态反馈线性化控制方法时的输出侧电流波形谐波含量高,为2.18%,与状态反馈线性化控制方法相比较,输出电流在0.02 s之后才逐渐稳定,由此可见状态反馈控制方法具有更快的响应速度。
综合上述2种非正常工况下的仿真结果可知,采用状态反馈进行控制的系统响应速度快、抗干扰能力强,大幅提高了系统对输出电流的控制能力。
5 硬件实现
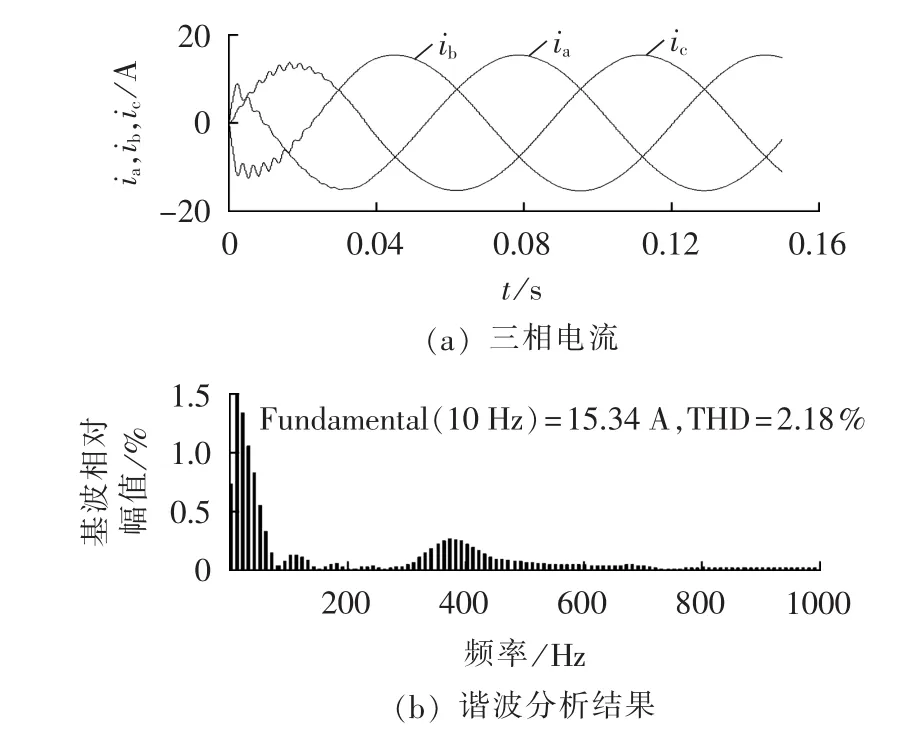
图6 未采用设计的控制器情况下,三相不对称负载时MC的输出电流波形及a相谐波分析结果Fig.6 Output current waveforms and phase-a harmonic current spectrum of MC without designed controller when three-phase loads are asymmetrical
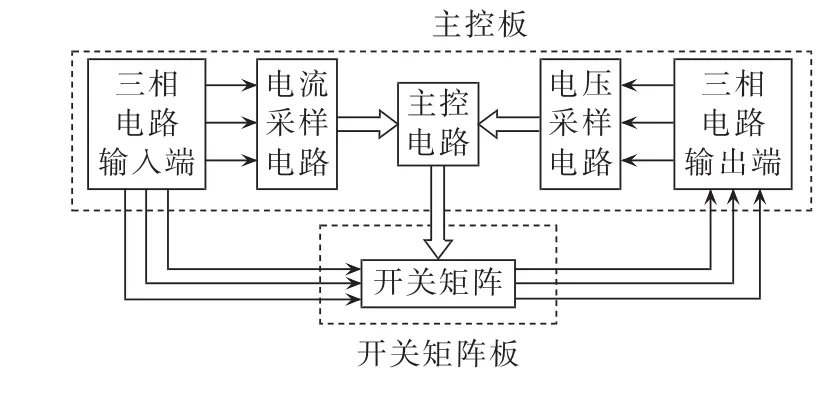
图7 硬件系统结构图Fig.7 Structure of hardware system
为了验证所设计的控制器的有效性,本文采用TI公司的TMS320F2812DSP设计矩阵变换器的样机。图7给出了硬件系统结构图,采用的主要元器件为主控芯片2812DSP、电流传感器CHB-25NP/SP6、电压传感器CHV-25P/50A、隔离光耦TLP250、大功率开关IGBT、大功率电阻等。硬件实验参数为:三相输入电压220 V,相位互差120°,输入侧电容、电感、电阻和仿真一致,负载电阻R=5 Ω、电感L=15 mH。考虑到电网电压和负载每时刻不可能是完全对称的,因此该实验视为电网、负载不对称情况下的综合实验。
矩阵变换器系统搭建完毕后调节系统,调试后得到示波器波形如图8所示。从图中可以看出经过开关矩阵调节后,输出侧的电流波形理想。因此,本文从实物层面上证明了设计基于状态反馈线性化的控制器对矩阵变换器有着良好的控制效果。
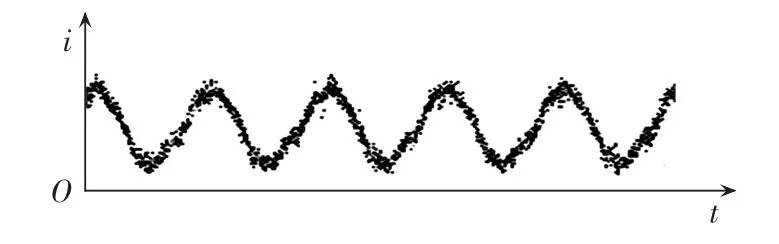
图8 MC输出侧a相实际电流波形Fig.8 Phase-a current waveform of MC output
6 实验现象原因分析
综合对比状态反馈线性化控制和常规控制作用下系统输出电流波形可以发现:在系统本身的参数(电阻、电感)或者电源输入变化时,常规控制的系统响应速度较慢(见图3—6),并且输出电流的谐波含量大(见图4、6),常规控制作用下三相输出电流不对称,控制作用不明显。造成这种现象的原因解释为:式(2)所示的系统为非线性,由控制理论可以知道,常规控制方法(见图2)只适合线性定常系统,对于非线性系统就无能为力。由于状态反馈线性化通过反馈作用把非线性系统变成了线性系统,即使被控对象的结构参数发生变化,通过实时反馈使得其保持线性系统的本质,因而对系统的参数变化具有很好的鲁棒性和参数适应性。
7 结论
本文从状态反馈线性化的角度出发设计矩阵变换器系统的控制器,充分利用了矩阵变换器的结构特性,从仿真以及硬件实验可以得出以下结论:
a.该控制器物理意义清晰,参数调节方便;
b.与未采用状态反馈线性化控制器的系统相比较,该控制器在输入三相不对称电压、三相负载不平衡等特殊情况下,具有系统响应时间短、鲁棒性强的优势;
c.矩阵变换器在反馈线性化的控制作用下,控制效果好,谐波含量很少,具有良好的工程应用前景。
猜你喜欢
中等数学(2020年2期)2020-08-24 07:58:46
哈尔滨铁道科技(2020年4期)2020-07-22 02:22:28
测控技术(2018年9期)2018-11-25 07:44:24
北京航空航天大学学报(2016年7期)2016-11-16 01:50:55
光学精密工程(2016年3期)2016-11-07 09:03:32
黑龙江工程学院学报(2015年5期)2015-12-04 01:39:47
电源技术(2015年11期)2015-08-22 08:50:58
电源技术(2015年12期)2015-08-21 08:58:44
电测与仪表(2015年8期)2015-04-09 11:50:00
电测与仪表(2015年12期)2015-04-09 11:44:44