
基于Rayleigh分布杂波模型的动态目标检测算法①
2015-09-18 08:11王陆林刘贵如郭贤生奇瑞汽车股份有限公司前瞻技术科学院安徽芜湖4006安徽工程大学计算机与信息学院安徽芜湖4000电子科技大学电子工程学院四川成都67
佳木斯大学学报(自然科学版) 2015年6期
王陆林, 刘贵如, 王 海, 郭贤生(.奇瑞汽车股份有限公司前瞻技术科学院,安徽 芜湖 4006;.安徽工程大学计算机与信息学院,安徽 芜湖 4000;.电子科技大学电子工程学院,四川 成都 67)
基于Rayleigh分布杂波模型的动态目标检测算法①
王陆林1, 刘贵如2, 王海1, 郭贤生3
(1.奇瑞汽车股份有限公司前瞻技术科学院,安徽 芜湖 241006;2.安徽工程大学计算机与信息学院,安徽 芜湖 241000;3.电子科技大学电子工程学院,四川 成都 611731)
为了解决传统的动态目标检测算法在功率波动明显的非均匀复杂背景噪声下,检测性能严重下降的问题,基于杂波分布模型和恒虚警理论,提出一种基于Rayleigh分布杂波模型的单元最大最小平均恒虚警(CMMA-CFAR)检测算法,通过均值和均方差估计噪声平均功率并动态调整检测门限参数,在保持较低虚警率的前提下,提高目标的检测率.采用了数字滤波器组降低旁瓣功率,抑制强杂波干扰.经过与其它算法仿真对比,该算法具有最优的检测性能,检测率大于95.00%.该方法已应用于车辆开门防撞预警系统,在奇瑞G5车型上进行了标定测试,针对典型接近目标:自行车、摩托车和轿车,平均预警率大于97.50%,误警率小于3.00%.结果表明,该算法在杂波边缘干扰和非均匀噪声背景下,仍具有良好的检测性能.
目标检测;信号处理;恒虚警;瑞利分布
0 引言
随近年来在车辆主动安全巨大市场需求驱动下,相关主动安全技术步入了快速发展的轨道,各种探测技术被广泛使用,其中毫米波雷达以其具有全天候工作的优点而成为主流的检测技术.相关雷达噪声分布和目标检测技术的研究也引起了广泛关注,国内外专家学者对此进行了深入的研究,提出了各种检测算法,虽然在各自特定的环境中具有很好的检测性能,但是算法相对复杂,表现出一定优势的同时,也存在一定的缺陷,针对实际的工程应用环境,实用性和通用性差,不能在任何干扰环境中保持稳健性.
1 瑞利分布杂波模型
本文以连续波毫米波雷达在城市工况下车辆开门预警系统应用为研究对象,对复杂动目标环境下雷达中频回波信号中包含的杂波信号特性进行研究分析.图1为在实际工况下无接近目标时采集的一段杂波谱,图2为有接近目标时采集的一段杂波谱.
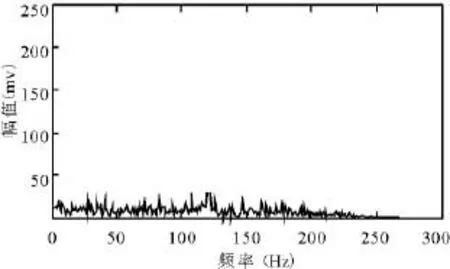
图1 无接近目标时的噪声杂波功率谱
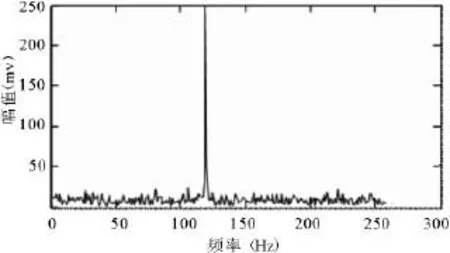
图2 有接近目标时的噪声杂波功率谱
当运动目标快速接近或者远离时,回波中包含的多普勒频移较大,在频域内有效回波信号能量远远大于背景噪声,因而背景噪声模型相对简单,但是当目标相对距离较远,速度较低的情况下,回波信号很弱,几乎被背景噪声所淹没,极大的影响目标探测概率,背景噪声模型相对复杂.因此动态目标的检测首先需要充分了解目标回波信息特性,建立背景噪声分布模型,以此估计杂波功率范围以及平均功率,得到较为精确的恒虚警检测门限[1].正态分布、指数分布、贝利分布、瑞利分布、威布尔分布、K分布和伽马分布均为较常见的噪声分布模型[2].
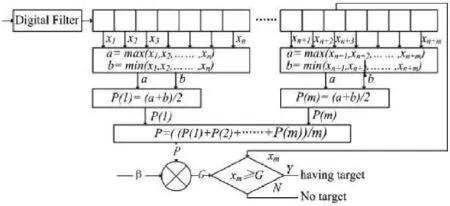
图3 改进的恒虚警算法

图4 各检测算法与CMMA·CFAR在相同背景噪声下检测性能比较
通过对城市工况下各种复杂场景中采集的大量中频回波信号数据进行抽样提取,在选取杂波样本时,充分考虑了目标的多普勒带宽以及距离旁瓣的影响,滤掉有效目标信号,避开目标谱峰,得到相对平稳的杂波样本.抽取无动态目标时的回波信号噪声样本统计量,其中噪声以白噪声为主,信噪比相对较小,通过拟合,噪声分布接近正态分布,其概率密度函数为:

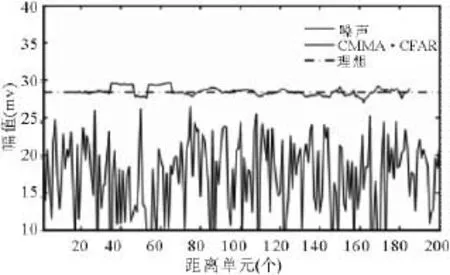
图5 CMMA·CFAR检测算法仿真结果
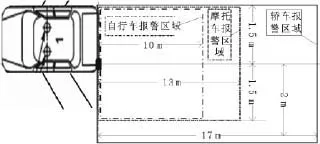
图6 标定的系统探测区域
式中,μ为变量X的均值,σ2是方差.服从正态分布的随机变量取值越靠近μ,概率越大,而取值越远离μ,概率越小;σ越小,分布越集中在μ附近,σ越大,分布越分散.通过拟合得到的正态分布模型可以估计杂波平均功率参考值范围,剔除范围之外的个别极大或者极小的干扰信号,使得实际估计的杂波平均功率更准确,有利于提高检测概率,降低虚警率.令y=(X-μ)/σ,则统计量y的概率密度函数为:

假设检测门限为T,PT为虚警率,则检测门限和虚警概率之间的关系为:

从公式(3)可以看出概率与积累噪声无关[3].单个动态目标的回波信号中包含有多普勒频移,回波峰值功率远大于杂波平均功率,以上模型仍然实用,此时杂波平均功率比无动态目标回波信号的杂波平均功率大,但是仍然服从正态分布,以估计得到的杂波平均功率为检测门限乘以门限因子即可通过恒虚警检测算法实时检测出动态目标并且保持恒定的检测概率.当有多个运动目标时,回波信号样本中包含有多个目标反射的回波噪声信号的叠加,抽取多目标回波信号噪声样本统计量Y=,其中背景噪声叠加,通过拟合,背景噪声接近瑞利(Rayleigh)分布[4],其概率密度函数为:

式中,σ2为单目标正态分布方差,瑞利分布均值,当采样样本k足够大,累积量近似服从正态分布.假设检测门限为T,则检测门限和虚警概率之间的关系同公式(3).
通过估计得到杂波功率均值和均方差进一步估计并实时自适应调整检测功率门限,保持恒定的检测概率.根据检测门限T和PT虚警概率之间的函数关系[4],在保持恒定的检测概率的基础上,根据相应的检测门限动态调整门限参数,从而可以在保持较低虚警率的基础上,尽可能的提高目标检测概率.
2 改进的动态目标检测算法
本文在对实际应用场景中回波信号背景噪声特性分析的基础上,给出了Rayleigh分布杂波模型,在此基础上结合以上检测算法的优点,提出一种改进的单元最大最小平均恒虚警检测方法(CMMA-CFAR)见图3.
先对某时刻n个相邻距离单元各自排序,然后选择最大,最小距离单元取均值,依次递推得到m个均值,然后再将m个均值再次取均值作为平均干扰功率P,再结合门限因子β,得到检测门限功率G,各个检测单元功率xm与门限功率G进行比较,当xm≥G时认为有目标,否则认为无目标.在噪声、多目标干扰和杂波边缘检测均有很好的检测性能和鲁棒性[5].
从实际场景中提取500个样本,对各典型检测算法进行仿真对比分析,时间和空间资源消耗、误检概率和检测概率见表1.
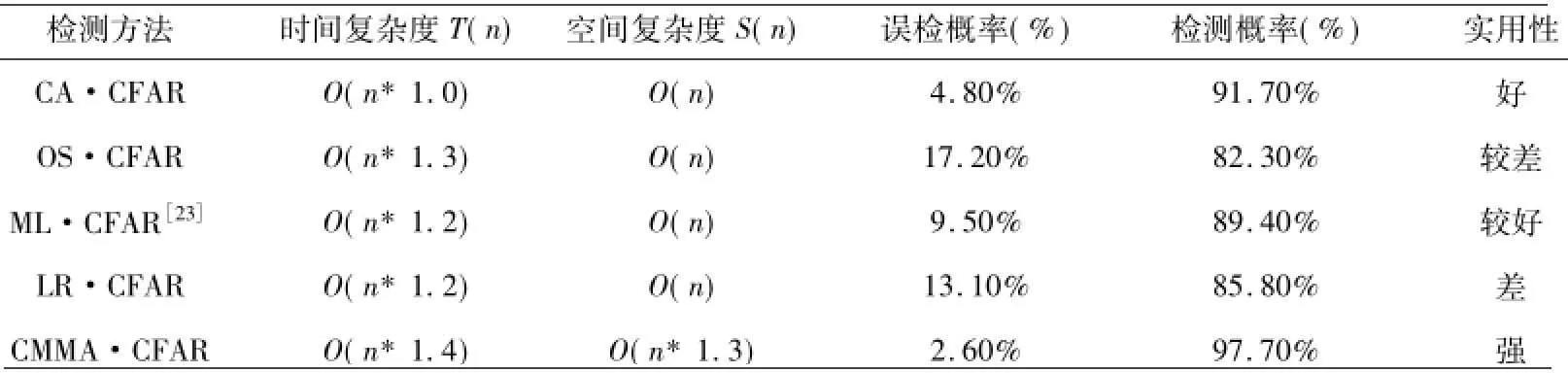
表1 各检测算法仿真性能对比
由表1可见,对相同的杂波样本和分布模型,不同的均值估计方法其性能不同,OS·CFAR[6]、ML·CFAR和LR·CFAR算法在时间复杂度和空间复杂度相同,但是只考虑边缘杂波干扰或者极个别干扰大的信号,对均匀噪声平均功率估计误差大,故误检率均大于5.00%,而CA·CFAR检测算法误检率相对稳定,误检率小于5.00%,但是对边缘杂波干扰噪声平均功率估计误差偏大.而改进的CMMA·CFAR检测算法则在充分分析实际场景下杂波背景噪声特性分布的基础上,充分借鉴各算法优点,兼顾均匀杂波和边缘杂波干扰的影响,误检概率最低(2.60%),检测率最高(97.70%),实用性最好.而在时间和空间资源上的消耗相对较高,但是针对目前嵌入式系统强大的性能和丰富的存储资源,增加的资源消耗可以忽略不计.为了对比分析各算法的在背景杂波干扰下的检测性能,分别对CA·CFAR,OS·CFAR,ML·CFAR,LR· CFAR与CMMA·CFAR方法仿真结果进行比较,检测性能对比曲线见图4.
由图4可以看出,在信噪比小于20dB的同场景背景噪声下各检测算法性能与检测率成正比,同虚警率成反比,在信噪比较低和较高区域检测概率差别较小,而在中间区域差别较明显.而在实际应用场景中所采样的回波信号信噪比在5~30dB左右,CMMA·CFAR检测算法与各算法相比,检测性能最大约5dB信噪比增益,当信噪比大于10dB时,检测概率仍大于97.50%,而其余算法检测概率均小于97.50%.当信噪比大于20dB时,检测概率均接近100.00%,当信噪比小于-5dB时,检测概率趋于0,有效信号被背景噪声完全淹没,无法实现目标检测.图5为CMMA·CFAR检测算法经过仿真得到的一段恒虚警门限曲线.从图5可以看出,该曲线既随回波噪声强度的变化而变化,又接近于理想的门限曲线,对应的样本仿真结果,目标检测率大于97.50%,结果表明:噪声功率门限参数估计方法具有很好的估计性能.
3 试验与分析
将CMMA·CFAR检测算法用于城市交通环境下基于多普勒毫米波雷达实现的车辆开门防撞预警系统中,针对实际场景,以三个典型接近目标为测试对象标定了报警区域标见图6.
针对自行车,本车车身左外侧向外横向1.5m本车车尾部向后纵向10.0m的黑色实线框区域(包括正后方区域)为报警区域;针对摩托车,横向1.5m,纵向13.0m的黑色点划线框区域(包括正后方区域)为报警区域;针对轿车,横向2.0m,纵向17.0m的黑色虚线框区域(包括正后方区域)为报警区域.针对各个典型目标标定的报警区域内纵向距离设定了若干测试点,使用CMMA·CFAR检测算法在各测试点进行200次测试.各个典型目标在各测试点的平均预警率见图7.
自行车在4.0m,7.0m测试点各测试200次的平均预警率分别是99.00%,96.00%.摩托车在4.0m,8.0m,13.0m测试点各测试200次的平均预警率分别是99.00%,97.00%,96.98%.轿车在4. 0m,8.0m,12.0m和17.0m测试点各测试200次的平均预警率分别是99.20%,98.40%,97.60%,96.28%.
各典型目标平均预警率见表2.自行车测试400次,预警率97.25%,摩托车测试600次,预警率97.50%,轿车测试800次,预警率97.87%.预警率均大于97.50%,虚警率均小于3.00%,结果满足系统指标需求.
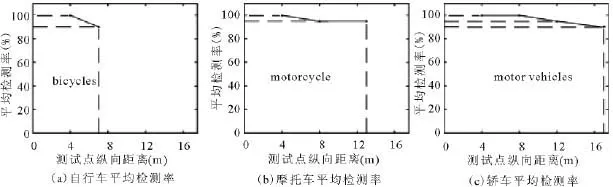
图7 各测试点的平均预警率

表2 系统平均预警率测试结果
4 结论
该文提出了一种噪声杂波分布模型的分析方法以及基于Rayleigh杂波分布模型的单元最大最小平均恒虚警(CMMA-CFAR)检测方法,克服了其它检测算法在杂波边缘干扰和非均匀背景噪声下检测性能明显下降的不足,在相同的杂波样本条件下,经过仿真对比分析,所提出的算法除了在时间和空间资源上消耗有所增加外,检测性能最好,误检概率2.60%,检测率97.70%.该方法应用于车辆开门预警系统,经过复杂城市交通环境场景测试,平均预警率大于97.50%,平均虚警率小于3. 00%,表现出了较佳的检测性能和实用性.
[1]郑作虎,王首勇.基于ARSAS模型参数估计的雷达目标检测方法[J].系统工程与电子技术,2015,04:782-788.
[2]高彦钊,占荣辉,万建伟.KK分布杂波下的距离扩展目标检测算法[J].国防科技大学学报,2015,02:118-124.
[3]赵新明,金艳,姬红兵.α稳定分布噪声下基于Merid滤波的跳频信号参数估计[J].电子与信息学报,2014,08:1879-1883.
[4]简涛,苏峰,何有等.复合高斯杂波下距离扩展目标的自适应检测[J].电子与信息学报,2012,05:990-994.
[5]You Guo-hong,Qiu Tian-shuang,Song Ai-min.Novel Direction Findings For Cyclostationary Signals In Impulsive Noise Environments[J].Circuits,Systems,and Signal Processing,2013,32(6):2939-2956.
[6]Yahong R Z and Vitor H N.Two Variable Step-size Adaptive Algorithms For Non-Gaussian Interference Environment Using Fractionally Lower-order Moment Minimization[J].Digital Signal Processing,2013,23(3):831-844.
Moving Target Detection Method Based On The Rayleigh Distribution Clutter Mode
WANG Lu-lin1, LIU Gui-ru2, WANG Hai1, GUO Xian-sheng3
(1.Academy of Science and Advanced Technology,Chery Automobile Co.,Ltd,Wuhu 241000,China;2.Computer and Information Science,Anhui Polytechnic University,Wuhu 241000,China;3.School of Electronic Engineering of VESTC,University of Electronic Science and Technology,Chengdu 611731,China)
In order to solve the problem that the detection performances of the current moving target detection method decreases badly in non-uniform and complex background noise,which fluctuated significantly in power,a cell maximum and minimum average-CFAR(CMMA-CFAR)algorithm was proposed to maintain higher detection rate and low false detection rate by adjustment threshold in time based on the noise intensity based on clutter distribution model and CFAR theory.Digital filter bank was used to suppress noise effectively by lowering the digital signal sidelobe power.Compared with the simulation and analysis results of other algorithms,the algorithm had the best detection performance,whose detection rate was up to 95.00%.The algorithm was applied to a vehicle door open collision warning system,which was calibrated and tested on the Chery G5 car. For three representative closing targets:bicycles,motorcycles and motor vehicles,the average early warning rate was up to 95.50%and false alarm rate was down to 3.00%.The results show that the algorithm still has a good detection performance in clutter edge interference and non-uniform background noise.
target detection;Signal processing;CFAR;Rayleigh distribution
TN957.51
A
1008-1402(2015)06-0905-05
2015-10-12
国家自然科学基金项目(91120307);安徽省自然科学基金面上项目(1408085MF124);江苏省六大人才高峰项目(2014-DZXX-040).
王陆林(1979-),男,山西保德人,工程师,主要从事车辆主动安全、智能车控制和汽车电控技术研究.
猜你喜欢
噪声与振动控制(2022年3期)2022-07-04
科学与信息化(2021年30期)2021-12-24
锻压装备与制造技术(2020年2期)2020-12-05
山东体育学院学报(2019年1期)2019-05-13
地震研究(2017年3期)2017-11-06
中学物理·高中(2016年5期)2016-11-25
西北工业大学学报(2015年3期)2015-12-14
应用海洋学学报(2015年1期)2015-11-22
新高考·高一物理(2015年4期)2015-08-20
遥测遥控(2015年2期)2015-04-23
