
改进的菌群趋药性算法优化PID控制参数①
2015-09-18 08:08黄永青宋洪儒铜陵学院信息技术与工程管理研究所安徽铜陵244000合肥工业大学管理学院安徽合肥20009铜陵学院电气工程学院安徽铜陵244000
佳木斯大学学报(自然科学版) 2015年6期
杨 凡, 黄永青,2, 宋洪儒(.铜陵学院信息技术与工程管理研究所,安徽 铜陵 244000;2.合肥工业大学管理学院,安徽 合肥 20009;.铜陵学院电气工程学院,安徽 铜陵 244000)
改进的菌群趋药性算法优化PID控制参数①
杨凡1, 黄永青1,2, 宋洪儒3
(1.铜陵学院信息技术与工程管理研究所,安徽 铜陵 244000;2.合肥工业大学管理学院,安徽 合肥 230009;3.铜陵学院电气工程学院,安徽 铜陵 244000)
提出改进的细菌群体趋药性算法(BCC)来优化PID参数.针对BCC算法在多维变量搜索时,耗时且难于收敛到最优值,提出2种改变,一为变步长搜索,二为每一个细菌变量设定活动区域,移动后如超出设定区域,将采用区域内的固定值取代或精英取代两种方式优化,通过PID控制参数进行仿真实验,表明改进后的算法在参数的精度、稳定性和优化时间上都有很好的表现.
PID控制器;细菌群体趋药性算法;变步长搜索;精英取代
文章编号:1008-1402(2015)06-0877-03
0 引言
在控制工程中,PID控制具有结构简单、鲁棒性强、易于工程实现等特点,在工业控制过程中得到了广泛的应用.然而在此过程中,多数控制对象是非线性的,使用传统的控制方法难以实现对参数的优化整定,易产生振荡和大的超调.因此,PID控制器的3个参数Kp、Ki和Kd的选取,对控制系统的性能具有重要影响,解决其参数的整定也成为应用PID控制器的关键技术[1].
细菌群体趋药性(Bacterial Colony Chemotaxis,BCC)算法是浙江大学的李威武等人[2]在细菌趋药性(Bacterial Chemotaxis,BC)算法的基础上,融入群体智能的思想提出的,本文将根据PID参数的特点,提出一种改进的BCC算法,利用实验仿真来验证算法的有效性.
1 BCC优化算法
BCC算法是在单个细菌寻优的基础上,引入多个细菌通过交互信息的方式,择优获得最优点的群体智能算法,该算法常见的应用是对二维函数进行优化,进而可以扩展到对多维函数优化.该算法的步骤如下[2]:
(1)初始化算法的各个参数,如细菌个数、范围和维数,初始和终止收敛精度,精度更新常数.依据公式确定系统参数T0,b,τc.
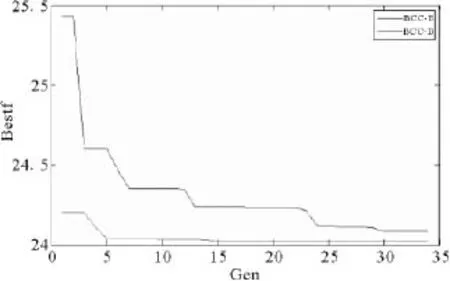
图1 BCC-E和BCC-D最优值的优化过程
(2)计算运动方向.以二维空间(xi,xi+1)为例,向左向右偏转的角度θi概率相同,均服从高斯概率分布.
(3)细菌运动距离l=v*τ,τ为移动时间.
τ的数值服从指数概率分布,由T决定:

(5)确定第i个细菌在移动步数k时,周围拥有更好位置的其他细菌中心点位置,和向该中心点移动的距离,确定第i个细菌k+1移动步数的位置xi,k+1″(x1,…xn);
(6)计算位置xi,k+1'和xi,k+1″的函数值,取二者中较小的函数值对应的位置,作为细菌i在第k +1步的移动位置;
(7)重复步骤4~6,直至中止条件满足.
算法中各个细菌的移动速度不变,当连续ne步前后函数绝对值的差小于一个欲先设定的小数,细菌将随机迁移一个新的位置.所有的参数采用全体更新策略.
2 BCC算法的改进
2.1精度下降梯度的改变
在BCC算法中,沿用的是全体参数自动更新策略,其中参数T0由公式(1)可知,ε是期望的计算精度,算法运行时需设置初始收敛εbegin和终止收敛精度εend,如当前精度满足时,会采用精度更新常数α得到一个新的精度εnew=εold/α,在算法初期,需要较大的下降梯度,在算法后期需较小的下降梯度,更利于寻优.由此采用下面的公式对α进行调整;其中αmin,αmax为α的下限和上限,gen为当前迭代代数,genmax为最大迭代次数.

随着进化代数的不同,α的值将发生变化;在算法初期时,α较小,下降梯度较大,即步长较大;后期时,α相对较大,步长变小.
2.2固定值或精英替代的细菌位置的引入
BCC算法中需先确定每一维变量范围,根据范围确定初始种群,在算法运行时,会出现一些细菌超出限定的范围.这时,一般采用将超出范围的每个细菌退回到上一次获得的位置,重新生成新的位置方法;但是,这种处理方式在处理多维变量问题时,特别耗时,结果令人不是很满意.由此提出2种改进方式,一种方式为,当生成的新的细菌位置x(x1…xn)中任何一维变量超出欲先设定的范围时,针对细菌不同维变量xi采用i维范围内的固定值取代,这个固定值可以是i维范围的上下限,并把使用这种取代策略的算法记为BCC-D;另一种方式为:精英取代,即记录上一代细菌群体中的最好细菌位置,当生成的第i个细菌新位置x(x1…xn)中任一维变量超出规定范围时,进行该位置的整体变量取代.同时对取代的细菌个数进行计数,如果个数超出总数的1/3,进行变异操作,保持种群的差异性,利于寻优,把使用这种取代策略的算法记为BCC-E.
3 改进的BCC算法优化函数实验
为了验证上述改进方法的有效性,利用下面的Sphere、Griewank两个测试函数,对改进的BCC算法(BCC-E)、PSO算法、GA算法进行优化比较.函数如下:
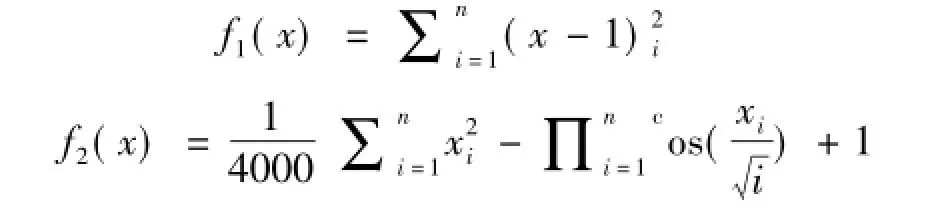
函数f1(x)∈[2,2]是单峰函数,只有一个全局最小点(1,1),函数值f1(x)=0;函数f2(x)∈[-2,2]是复杂多峰函数,全局最优值为0,在点(0,0)出获得.
三种算法的相关参数设置如下:BCC-E算法中细菌个数取20,初始精度设为10-2,终止收敛精度取10-6,精度下降梯度上限αmax为1.25,下限αmin为1.05,依据公式(4)得到每一代的α,变异概率Pm=0.6;PSO算法种群数取20,迭代数取1500Ga算法种群大小取200,终止代数1000,Pc=0.9,自适应变异操作.
测试函数维数为3,三种算法各运行100次,在时间、函数最优值精度和成功率上进行比较,见表1.由表可见,BCC-E算法用时较多,但函数最优值收敛精度较高.

表1 BCC-E,PSO,GA算法性能的比较

f1 1.473715 5.0e-013 100% 0.69976 9.2966e-008 100% 0.547367 1.9946e-007 100% f2 1.468537 1.11e-016 100% 0.788685 3.7324e-008 100% 0.585063 2.2151e-009 100%
4 改进BCC算法优化PID参数仿真实验
在工业控制中,被控系统常被近似为一阶或二阶函数,本文被控对象采用的是二阶传递函数,输入对象为阶跃信号,采样时间为1ms.选用下式作为参数选取的最优指标:

式中,e(t)为系统误差,u(t)为控制器输出,tu为上升时间,w1,w2,w3为权值.
产生超调,采用惩罚功能,将最优量作为最优指标一项[15].
即最优指标J由三部分组成:第i代的误差error(i)的绝对值;第i代控制量输出u(i);上升时间tu.
分别采用BCC-E和BCC-D方式对该二阶传递函数进行优化,优化的目标即为J.PID控制器有三个参数,算法变量维数即为三维;设定各参数取值范围Kp∈[0,20]、Ki和Kd∈[0,1],则给出了两种算法中变量的初始化范围.两种算法除变量范围与第4节不同外,其他参数设置同上;公式(6)中设定w1=0.999,w2=0.001,w3=2.0,w4=100.两种方式获得的最优指标的优化过程见图1.
由图1可见,2种方式都用了较少的进化代数获得了最优值,BCC-E相比较BCC-D方式更能快速的获得最优,且最优值更小.通过多次优化仿真实验BCC-E获得的最优参数如下,最好适应值Bestf =24.0140;并且每次寻优操作结束后将有80%以上的细菌个体能够聚集在最优点;采用BCC-D方式获得的最优参数如下:Kp=19.7071,Ki=0. 2526,Kd=0.917,Bestf=24.1548;每次寻优操作仅有20%的细菌个体获得了最优值.
若采用BCC算法优化PID参数,该算法的各个参数如细菌个数、初始和终止精度与BCC-E参数设置相同,精度更新常数α为1.15,获得最优参数值及最优值为:Kp=60.3574,Ki=0.5047,Kd= 0.8337,Bestf=22.0552;与改进的两种BCC算法相比,BCC算法在进化时间和数值精度上没有太大的区别,但在优化指标J获得最优时,三个参数最终的取值将超出当初设定的范围,且大部分情况下各个参数取值不合常理.
为确保每个参数一直处于欲先设定的范围,针对PID参数的特点,提出BCC-D和BCC-E两种方式进行优化,每次优化结束后,所有的细菌都将处于预定范围,从获得的最优参数数据和优化时间可知,这2种改进方式是有效的、快速的.
[1]郭大庆,李晓,赵永进.基于改进PSO算法的PID参数自整定[J].计算机工程,2007,38(18):202-204.
[2]黄伟锋,林卫星,范怀科等.细菌觅食优化的智能PID控制[J].计算机工程与应用,2011,47(21):82-85.
Improved Bacterial Colony Chemotaxis Algorithm for the Optimization of PID Control Parameters
YANG Fan1, HUANG Yong-Qing1,2, SONG Hong-Ru3
(1.Institute of Information Technology&Engineering Management,Tongling College,Tongling 244000,China;2.School of Management,Hefei University of Technology,Hefei 230009,China;3.Institute of Electric Engineering,Tongling College,Tongling 244000,China)
An improved bacterial colony chemotaxis algorithm(BCC)was proposed to optimize the parameters of PID control.When the multi-dimensional variables are optimized,the BCC algorithm is time consuming and difficult to converge.Two improved measures were put forward.The first way is to use the variable step search;the second way is to set the active area for each bacterial variable.If the new position is out of the set area,the location of the bacteria will be replaced by a fixed value or the elite value in the region.Through the PID control parameters,the simulation experiments show that the improved algorithm has a good performance in the accuracy of the parameters,the stability of the parameters and the optimization time.
PID controller;bacterial colony chemotaxis algorithm;variable step search;elite replacement
TP18
A
2015-10-20
中国博士后科学基金(2014M560508);安徽省高等学校省级自然科学研究项目(KJ2012A269);安徽省自然科学基金项目(1208085MG121);教育部人文社会科学研究青年基金(11YJC630074);铜陵学院院级科研项目(2014tlxyxs31,2015tlxy31,2015tlxy34)资助.
杨凡(1978-),女,辽宁营口人,硕士,讲师,从事进化计算研究.
猜你喜欢
红蜻蜓·低年级(2022年2期)2022-03-19
小哥白尼(趣味科学)(2021年10期)2022-01-17
学生天地(2020年10期)2020-08-25
作文周刊·小学一年级版(2020年12期)2020-05-14
作文周刊·小学二年级版(2019年12期)2019-04-26
作文周刊·小学一年级版(2019年4期)2019-04-25
电子制作(2018年11期)2018-08-04
科技知识动漫(2017年12期)2018-03-07
测绘科学与工程(2016年5期)2016-04-17
儿童故事画报·发现号趣味百科(2015年10期)2016-01-20
