固定式减摇鳍执行机构的模态及动态响应分析
2015-09-16 17:43修哲操安喜许乐平
计算机辅助工程 2015年4期
修哲+操安喜+许乐平


摘要: 采用有限元法对小型高速船使用的固定式减摇鳍执行机构进行模态分析和瞬态动力响应分析,对减摇鳍执行机构的结构动力性能进行全面分析.结果可为同类减摇鳍执行机构的结构设计提供参考.
关键词: 小型高速船; 减摇鳍; 模态分析; 瞬态动力响应; 有限元; 结构强度
中图分类号: U661.42文献标志码: B
Abstract: The modal analysis and transient dynamic response analysis are performed on the fixed fin stabilizer of a small highspeed boat by finite element method. The structural dynamic performance is fully analyzed for the actuator of the fin stabilizer. The results can provide reference for the design of the same kind of fin stabilizer actuator.
Key words: small hightspeed boat; fin stabilizer; modal analysis; transient dynamic response; finite element; structure strength
收稿日期: 2014[KG*9〗04[KG*9〗27修回日期: 2014[KG*9〗07[KG*9〗24
作者简介: 修哲(1989—),男,辽宁沈阳人,硕士研究生,研究方向为船舶工程,(Email)1051703671@qq.com0引言
由于风浪的作用,船舶在海上航行时会产生横摇、纵摇、升沉等运动,其中横摇运动对船舶的适航性、乘员的舒适性和设备的安全性影响最大.航行于沿海的小型高速船,由于船舶尺寸小、横稳心高、自然横摇周期短,且沿海海浪中短峰波最常见,因而最容易引起横摇共振.[1]为此,在航行于沿海的小型高速船上安装减摇装置非常必要.目前,常用的减摇装置有减摇鳍、减摇水舱、减摇陀螺等.减摇鳍属于主动式减摇设备,减摇效果好,在船舶高速运行条件下,减摇效率最高可达90%,而且设备占用空间小,是小型高速船减摇设备的首选.[25]减摇鳍装置主要由鳍组件、执行机构、液压系统和液压机构等组成.其中,执行机构是减摇鳍装置中的最大构件,承担鳍的回转与零位锁紧功能.鳍产生的巨大升力通过执行机构作用到船体上,所以执行机构也是减摇鳍设备最重要的承力构件.[3]减摇鳍结构设计和优化的问题逐渐引起重视.[68]
对于小型高速船,由于受舱室空间和空船质量的制约,要求减摇鳍执行机构的尺寸和质量尽量小.这些要求对于需要承受巨大升力、阻力和转矩的减摇鳍执行机构的结构设计来说极具挑战性.[9]在已有的工程实践中,由于结构静强度导致执行机构结构失效的情况未见报道,而是出现由于执行机构遭遇瞬时冲击力引起执行机构结构失效的故障.[10]当船舶在恶劣海况下高速航行时,减摇鳍设备在升力和波浪激振力等多种载荷瞬时冲击的联合作用下,易发生结构的断裂失效,因而减摇鳍执行机构的动力性能成为减摇鳍结构设计的关键问题.对减摇鳍执行机构进行模态分析和激振条件下的瞬态动力响应分析是保证减摇鳍装置安全和稳定工作的前提.为此,利用有限元软件对减摇鳍执行机构进行动力特性研究,建立减摇鳍执行机构的三维实体有限元仿真模型,对其进行约束条件下的模态分析.考虑航行中的小型高速船减摇鳍装置可能遭遇的波浪激振,对减摇鳍执行机构进行瞬态冲击力作用下的动态响应计算.
1有限元模型建立
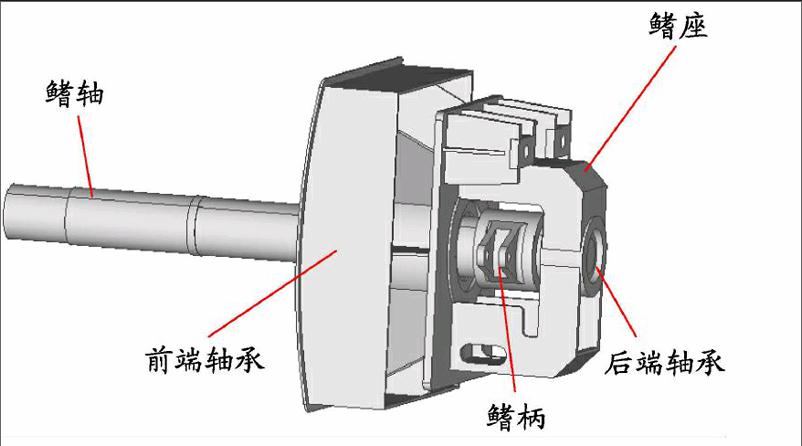
固定式减摇鳍执行机构主要由鳍轴、鳍座、前后支承轴承、鳍柄、连杆和转鳍油缸等零部件组成,见图1.鳍轴首端伸出船体舷侧以外,鳍安装于鳍轴外伸段,鳍轴通过鳍座前后两端的轴承固定于鳍座,鳍柄通过键与鳍轴相连,连杆连接鳍柄与液压油缸.这些零部件安放于船舱内,鳍座通过加强肘板与船体舷侧外板相连,同时与船体主骨架相连.由以上机械零部件组成的执行机构,其结构型式与以板梁组合结构为主的船体结构有显著差别.为此,采用三维实体有限元模型对执行机构进行有限元仿真计算.
首先,利用SolidWorks强大的几何造型功能建立减摇鳍执行机构的三维实体几何模型.在建模过程中,根据减摇鳍执行机构的传力路径和受力特点,对执行机构进行简化处理:1)将次要的附属结构部件与主要部件进行合并,如将与鳍轴紧密相连的轴承与鳍轴合并,既减少耗费资源的接触对探测与非线性计算,又不影响对重要构件应力的评估;2)将不必要的、会影响网格划分的圆孔进行填充,并且去掉可能影响网格划分质量和计算效率的次要结构.
将几何模型导入到有限元软件进行网格划分.在网格划分中采用3种单元类型.
1)梁单元.考虑到油缸连杆主要起传力作用,模型中采用梁单元模拟.
2)四面体实体单元.鳍轴与鳍座采用NXNastran提供的C3D10M四面体单元模拟.单元尺寸总体上为36 mm×36 mm×36 mm,在应力水平较高、结构形状不规则以及本身几何尺寸较小的位置,单元的尺寸控制在24 mm×24 mm×24 mm左右.
3)质量单元.鳍结构及其附连水质量采用质量单元模拟.
有限元模型见图2,单元总数为329 849个,节点总数为77 027个.
2执行机构结构约束模态分析
一般情况下,执行机构结构的前几阶低阶固有频率对结构的动力学性能影响较大,远离振源频带的模态对结构实际影响较小.本文研究的减摇鳍执行机构设置于船体左右舷侧,是船体结构的组成部分,为使计算结果更具参考性,将计算频率适当放宽,计算执行机构前6阶固有频率及其对应的模态阵型.在模态计算中,对减摇鳍执行机构有限元模型进行约束,约束点取在执行机构与船体结构相连位置的节点上,约束条件取为Ux=Uy=Uz=0.需要说明的是,鳍结构安装于鳍轴首端,悬伸于舷侧以外,运动过程中有附连水质量的影响.附连水质量根据结构的设计尺寸进行具体施加,总附连水质量为11.2 t,均匀施加在鳍轴结构上.故将鳍结构本身质量及其附连水质量均考虑为质量点单元的形式.采用Lanczos方法进行求解,计算得到的前6阶模态振型见图3,固有频率及模态特征见表1.a)1阶垂向弯曲,f=24.25 Hzb)1阶横向弯曲,f=47.76 Hzc)2阶垂向弯曲,f=138.93 Hzd)1阶扭转,f=178.73 Hze)2阶横向弯曲,f=179.68 Hzf)3阶垂向弯曲,f=194.51 Hz图 3减摇鳍执行机构前6阶模态振型
Tab.1Natural frequency and modal characteristics of first six orders of fixed fin stabilizer actuator序号模态固有频率/Hz振型描述11阶横向24.25执行机构鳍轴垂向弯曲21阶垂向47.76执行机构鳍轴横向弯曲32阶弯曲138.93执行机构垂向2阶弯曲41阶扭转178.73执行机构1阶扭转52阶弯曲179.68执行机构横向2阶弯曲63阶弯曲194.51执行机构垂向3阶弯曲
由图3可知:第1和2阶振型主要表现为鳍轴的弯曲模态,第3阶振型为2阶轴向弯曲振动,第4阶振型为扭转振动,第5阶振型为2阶轴向弯曲振动,第6阶振型为3阶轴向弯曲振动.
3瞬态冲击载荷作用下执行机构的动态响应分析3.1激励的确定
航行中的船舶减摇鳍随船体运动,易遭受波浪的冲击,其外部载荷具有明显的随机性和瞬态性.选择减摇鳍所在船经历的海况条件为中国沿海海况条件.在前文模态分析的基础上,根据波浪中运动船舶所受载荷的特点,假定其冲击载荷为脉冲载荷,脉冲幅值和脉冲作用时间根据波浪的海况条件进行确定的,载荷时间历程曲线见图4.作用于鳍面的升力、阻力和扭矩由执行机构传递至船体,经计算,在中国沿海典型工况下鳍面所受各项力的最大值分别为升力Fz=376.8 kN,阻力Fx=184.6 kN,扭矩My=63.083 kN·m,作用力与作用点位置见图5.图 4载荷时间历程
3.2结果分析
选取执行机构上具有代表性的2个节点进行动态分析.这2个节点分别位于鳍轴的端部和转鳍油缸座处,节点位置见图5,计算结果位移时程曲线见图6和7.由此可知:在瞬态冲击力的作用下,鳍轴端部变形经历急剧增大而后迅速减小、最后不断波动的过程,非线性特征非常明显,呈锯齿状,位移峰值达到8.7 mm;转鳍油缸座处动态响应的数值相对较小,说明冲击载荷对其影响较小.据减摇鳍的结构形式和材料性质,初步估算阻尼值为0.2.
动态等效应力云图见图8.由此可见:最大应力位于轴杆连接处,其值为213 MPa,说明在瞬态激励载荷作用下,执行机构局部可能产生瞬时高应力,高应力范围小但应力值较大,容易引起疲劳失效,设计和加工制造时应予以足够重视.
4结论
对小型高速船常用的固定式减摇鳍执行机构进行模态和瞬态动力响应分析,得到如下结论.
1)减摇鳍执行机构固有频率均在24 Hz以上,前几阶模态以鳍轴的横弯为主,与其工作频率相差较远,不易发生共振.
2)在瞬态冲击载荷作用下:鳍轴端部位移较大,非线性特征明显;鳍轴根部应力较大,设计时应予以重视.
3)固定式减摇鳍执行机构的结构固有频率较高,在一般海况下能够避开减摇鳍的工作频率,不易发生共振,但是在高海况条件下,减摇鳍结构在各种瞬时冲击载荷的联合作用下,执行机构的鳍轴动态响应显著,鳍轴端部位移较大,鳍轴根部局部应力水平较高,设计和制造加工时应予以重点关注.参考文献:
[1]杨奕. 减摇鳍装置在小型高速船的应用前景[J]. 船舶工程, 2012, 34(S2): 261264.
YANG Yi. Application prospect for fin stabilizer on small high speed vessels[J]. Ship Eng, 2012, 34(S2): 261264.
[2]洪超, 陈莹霞. 船舶减摇技术现状及发展趋势[J]. 船舶工程, 2012, 34(S2): 236244.
HONG Chao, CHEN Yingxia. Current situation and tendency of development of ship stabilizer technique[J]. Ship Eng, 2012, 34(S2): 236244.
[3]邹宁. 船舶减摇装置及其应用[J]. 船舶工程, 2012, 34(S2): 271277.
ZOU Ning. Ship roll reduction device and its application[J]. Ship Eng, 2012, 34(S2): 271277.
[4]孟克勤. 我国减摇鳍装置的发展和一些设计问题[J]. 机电设备, 1995(5): 16.
MENG Keqin. Development and some design problems of fin stabilizer in our country[J]. Electromechanical Equipment, 1995(5): 16.
[5]董美华, 马汝建, 赵东. 船舶减摇技术研究进展[J]. 济南大学学报(自然科学版), 2008, 22(2): 183188.
DONG Meihua, MA Rujian, ZHAO Dong. Research progress of ship antirolling technology[J]. J Jinan Univ(Sci Technol), 2008, 22(2): 183188.
[6]潘晋, 喻红霞, 王德禹. 减摇鳍结构应力分析及新鳍型探讨[J]. 船舶工程, 2005, 27(2): 14.
PAN Jin, YU Hongxia, WANG Deyu. Stress analysis for a fin stabilizer structure and discussion of a new fin style[J]. Ship Eng, 2005, 27(2): 14.
[7]曾启盛. 基于MATLAB的减摇鳍收放过程力学特性仿真[J]. 船舶工程, 2012, 34(S2): 291294.
ZENG Qisheng. Mechanical characteristics simulation for fin stabilizer during retracting process based on MATLAB[J]. Ship Eng, 2012, 34(S2): 291294.
[8]周清华, 杜留法, 杨雄辉. 基于多点约束法的减摇鳍加强结构CAD/CAE一体化设计[J]. 上海交通大学学报, 2012, 46(8): 12801283.
ZHOU Qinghua, DU Liufa, YANG Xionghui. CAD/CAE integrated design of fin stabilizer reinforced structure based on multipoint constraint method[J]. J Shanghai Jiaotong Univ, 2012, 46(8): 12801283.
[9]宋吉广, 金鸿章, 孟令卫. 全航速减摇鳍鳍型优化设计[J]. 中国造船, 2013, 54(2): 110.
SONG Jiguang, JIN Hongzhang, MENG Lingwei. Optimum design of aerofoil for fin stabilizer at whole speed range[J]. Shipbuilding China, 2013, 54(2): 110.
[10]曾晓华, 宋飞, 唐成, 等. 基于SolidWorks的减摇鳍摇臂结构分析与改进[J]. 舰船科学技术, 2014, 36(2): 8285.
ZENG Xiaohua, SONG Fei, TANG Cheng, et al. Structure analysis and improvement on rocker arm of fin stabilizer based on SolidWorks[J]. Ship Sci & Technol, 2014, 36(2): 8285.
猜你喜欢
高教学刊(2022年13期)2022-05-24
中国应急管理科学(2022年2期)2022-05-23
课程教育研究(2021年10期)2021-04-13
智富时代(2019年7期)2019-08-16
智富时代(2019年7期)2019-08-16
大陆桥视野·下(2017年8期)2017-09-19
科技创新与应用(2016年34期)2016-12-23
农机使用与维修(2016年10期)2016-11-10
科技视界(2016年14期)2016-06-08
科技视界(2016年4期)2016-02-22