日语“ヲ格+位移动词”句式成立的认知语法研究
——以表示“路径”语义为中心
2015-09-11 09:09:49姚艳玲
东北亚外语研究 2015年2期
姚艳玲 吴 楠
(大连外国语大学 日本语学院,辽宁 大连 116044)
日语“ヲ格+位移动词”句式成立的认知语法研究
——以表示“路径”语义为中心
姚艳玲 吴 楠1
(大连外国语大学 日本语学院,辽宁 大连 116044)
本文基于认知语言学的观点,通过与デ格和ニ格表达式的对比,对表达路径语义的“ヲ格+位移动词”表达式的语义结构及事件结构特征进行了阐释。同一客观事件两种表达方式这一现象源于认知主体对同一认知框架内的不同部分发生了认知焦点的转移。“ヲ格+位移动词”表达式的认知焦点在于主体位移所形成的路径,而デ格和ニ格则分别突显的是位移动作发生的背景和归着点,语料中ヲ格与ニ格、デ格之间使用比例的差异,即多用ヲ格的使用状况也体现了日语位移动词的词汇化类型是动词框架语言这一类型学特征。
路径;认知焦点;转喻;事件结构;动词框架语言
一、引言
日语中“ヲ格+位移动词”表达式可以用来表达沿着某一路径的位移动作,如「川を泳ぐ」「山を登る」。然而,在表达同一客观事件时,还会出现「川で泳ぐ」「山に登る」等表达式。本文基于认知语言学的语义观,以人们对事件的认知方式为切入点,围绕以下问题展开论述:①对于客观世界中的同一位移事件,日语为何会使用伴随ヲ格,ニ格,デ格等不同格助词的位移动词句表达式;②这些表达同一位移事件的不同的句法形式各自反映了怎样的认知方式;③“ヲ格+位移动词”表达式的成立基于怎样的认知理据。
二、前人研究
对于表示路径的ヲ格,许多研究者从不同的角度发表了很多研究成果。菅井(1999:76-78)从ヲ格具有“过程性”的观点与デ格和ニ格进行区分,指出ヲ格突显的是位移的过程。三宅(1996:158-164)提出不受意志支配的路径同样可以用ヲ格标记的观点。谷口(2005:53-58)指出路径的ヲ格与表示受事的ヲ格有着共同的图式,即ヲ格标记的是与主语构成非对称性关系的末端参与者,路径的ヲ格具有“物体”的性质。从认知语言学视角对ヲ格多义性进行考察的有森山(2003:9-11),他认为场所用法的ヲ格是从典型的宾格用法扩展而来,有共同的图式,在认知过程中被隐喻为“物体”。同时,ヲ格位移动作开始时,主体与场所之间形成动力连锁,即行为链便得以成立。而使用ニ格时,主体与场所之间并未形成动力连锁。楠本(2002:7-10)则认为主体对位移动作所涉及的领域范围有一种占有意识,因而主体对ヲ格场所具有支配性,ヲ格场所是主体控制的对象。
总体来说,前人研究大多以ヲ格作为研究对象,讨论了其区别于デ格、ニ格的不同语义特征,如具有“过程性”“支配性”“物体的性质”等等。但在格助词的理论框架下,还不足以对“ヲ格+位移动词”表达式的语义特征及事件结构作出全面统一的解释。具体来说:
①对于客观世界中的同一位移事件,为何会出现两种或两种以上的位移表达式,如「道路を走る」和「道路で走る」,单纯探讨ヲ格和デ格的语义用法区别还不足以解释这一语法现象形成的动因。
②前人研究对于ヲ格与デ、ニ格语义差异的探讨,大多没有基于语料库数据的实证分析。因此,对于ヲ格与其他格助词在标记空间场所名词的种类和使用频率上具体有何差异、差异形成的原因以及这些语例的数量反映了日语怎样的类型学特征等,都未能做出相应的阐释。
因此,本文在前人研究的基础上运用认知语言学的方法论,以“格助词+位移动词”这一句式作为考察对象,基于语料库数据的实证调查,进一步探讨日语表达位移事件的不同表达式各自反映了何种不同的认知方式,进而揭示“ヲ格+位移动词”表达式成立的认知理据以及使用ヲ格的语例数量所反映的日语类型学特征。
三、表示路径语义的位移动词
上野、影山(2001:46-48)指出,位移是指物体在时间的推移中改变其空间位置,表达这一状况的动词就是位移动词。按照动词是具有内在的方向性还是伴随着样态性,将日语位移动词大致分为以下两类:规定位移路径的“路径动词”和规定位移样态的“样态动词”,代表性动词如下所示:

寺村(1982:103)也以位移动词通常搭配的格助词为基准,将位移动词分为「出どころ、通りみち、到達点」三类。其中,「通りみち」的代表性动词有:「歩く、走る、駆ける、這う、進む、飛ぶ、通る、経過する、渡る」等。
本文的研究目的是考察“ヲ格+位移动词”表达式的成立机制,需要分别与“デ格+位移动词”和“ニ格+位移动词”表达式进行对比考察。因而选取位移动词时需要满足以下几个条件:
①按照搭配格助词的不同将位移动词分为两类:能同时与ヲ格和デ格搭配的位移动词以及能同时与ヲ格和ニ格搭配的位移动词。根据动词的不同性质将前者称为方式动词,后者称为方向动词。
②选取的位移动词只考虑基本动词,由基本义派生出来的词以及复合动词均不作为考察对象。
③基于语料库的数量调查和统计,选取的位移动词尽量能够涵盖ヲ格、デ格、ニ格场所名词的全部用法。
基于以上条件,本文从上野、影山(2001)和寺村(1982)所列代表性位移动词中,利用『現代日本語書き言葉均衡コーパス』语料库进行数据调查,选取满足以上三个条件,并且ヲ格使用频率最高的位移动词如下所示:

四、“ヲ格+位移动词”句式的语义结构
认知语言学认为在描写同一客观世界时,由于认知方式的不同,用来编码的语言表达式也会因之而不同。山梨(1995)将语义所描写的客观状况称之为“状况层级的语义”,将语义所反映的主观把握称之为“认知层级的语义”。基于上述的语义观,本文认为对于描写同一位移事件分别出现ヲ格,デ格,ニ格等多种表达方式,也是源于认知主体对位移事件的不同识解方式,反映在语法形式上形成了不同的编码方式。
(一)方式性位移表达式
方式位移动词通常能够与ヲ格和デ格搭配,本文利用『現代日本語書き言葉均衡コーパス』语料库进行调查的结果,将ヲ格场所分为两大类:自然类和人工类。并依据各类场所的具体特征,如界限、范围大小、用途及内部结构等标准,再细分为“道路”“场地”“地形”“房间”等11类具体的场所,如表1所示。

表1 方式性位移表达式空间场所的分类
观察表1可以发现,方式位移动词的ヲ格使用数量要远高于デ格(293例vs50例),而且,能够用デ格标记的场所种类只有“道路”“河海”“天空”这三种。那么,它们与ヲ格标记的位移表达式有着怎样的语义区别?

由语境可以判断,例(1)“看到漫山遍野的含羞草”是以位移主体持续性地沿着高速公路前行为基础的。也就是说,「高速道路を走る」描写的是主体在道路的范围内进行位移的整个过程。而例(2)表达的是事故发生地在高速公路,事发时正在进行「走る」的位移动作这一状况。
西村、野矢(2013:161-163)指出,对同一认知框架内不同部分认知焦点的转移是转喻②的基本特征,而认知框架是人们对于同一客观状况所共有的百科事典知识。本文基于这一概念来分析两种表达式不同的语义特征。首先,表达路径的位移事件有着共同的认知框架,即主体在有一定空间范围的场所内实施方式动词所表达的位移动作。如图1的①,当认知焦点在于通过实施位移动作所实现的整个位移过程(A→A’)时,用ヲ格标记,「高速道路」作为认知参照点实际指代的是主体实施位移动作留下的轨迹,即整个位移路径。与之相对,如图1的②,「高速で走る」突显的是在高速公路这一限定的空间场所范围内,主体实施了「走る」所表示的位移动作,而位移动作的实施所带来空间位置变化的过程则没有得到突显。表1所示ヲ格和デ格的数量关系(134例vs2例)也表明日语中的“道路”在位移事件中通常是作为路径来认知的。
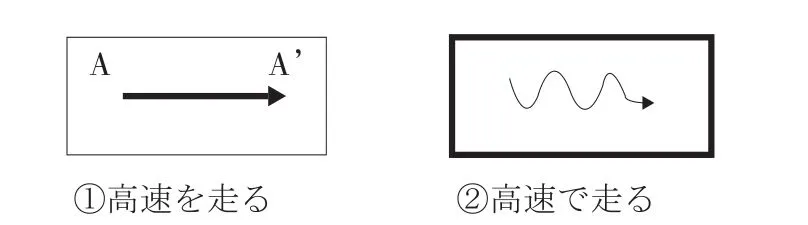
图1 方式性位移表达式的认知图式
接下来探讨的是“河海”类名词,该类名词是デ格标记场所中使用数量最高的。

例(3)描写的是游泳者在大海上挥动着臂膀奋力前行的位移过程。它的认知焦点在于通过实施游泳这一动作所带来的主体空间位置的变化,“海”作为认知参照点用来指代的正是主体空间位置变化所形成的路径。例(4)的语义中并不包含在海的范围内游过一段距离的位移路径。“海”只是为主体进行「泳ぐ」这一动作进行了范围限定,即便在该范围内未发生空间位置的改变仍然成立。由此可见,デ格标记的位移事件表达的并不是真正意义上的路径概念,它只是为方式动词表示的动作提供一个活动的背景或限定的范围。
此外,表1中的其他只能用ヲ格标记的名词也有着共同的特征,具有一定的空间范围,能够作为某一区域来把握,如“走廊,场地,地形,房间”等名词。ヲ格突显的是主体在场所范围内实施位移动作的整个过程,也即图1的①A→A’的位移路径。
(二)方向性位移表达式
该类表达式的特点是具有内在指定的方向性,能够同时与ヲ格和ニ格搭配。同样利用『現代日本語書き言葉均衡コーパス』语料库进行调查,将ヲ格场所分为“自然类”和“人工类”两大类,根据各类场所不同的具体特征分为“楼梯”“地形”“物体”“舞台”等15类,如表2所示。
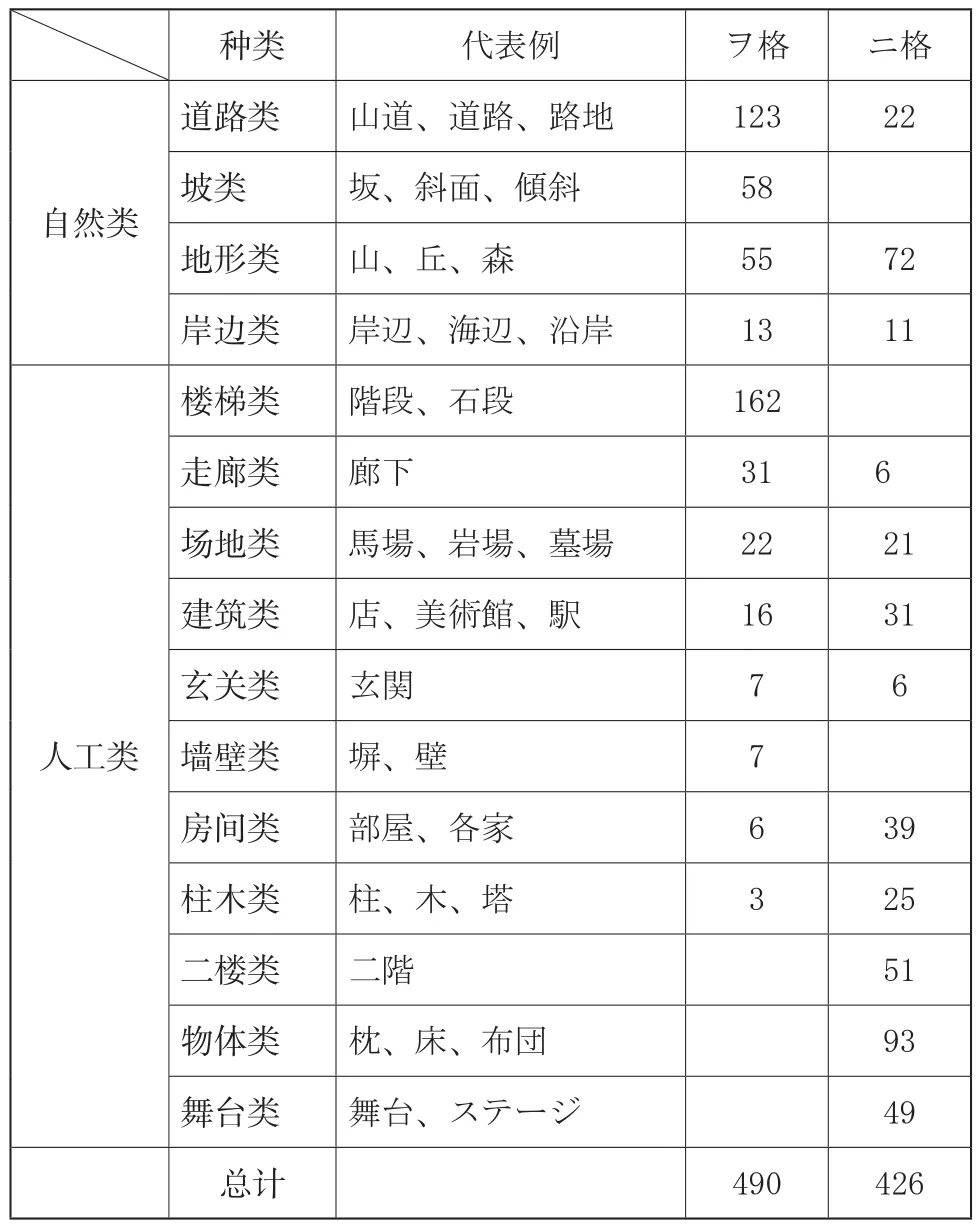
表2 方向性位移表达式空间场所的分类
如表2所示,方向性位移表达式的ヲ格和ニ格的种类和数量分布比较零散,大致可以分为三种情况:①兼有ヲ格和ニ格的两种表达式,如“道路”“地形”等。②只有ニ格标记的位移表达式,如“二楼”“物体”“舞台”三类。③只有ヲ格标记的位移表达式,如“楼梯”“坡”等。接下来,将分别对这三类情况进行分析。

例(5)描写的是主体沿着山的走势一步步向上爬的位移过程,也即主体空间位置变化的整个过程。对于例(6)由语境可以判断,它描写的是“从小学起便开始了爬山这种行为”,而不是从小学起便一直在山的范围内进行移动,并持续到现在。因而,对于「山に登る」来说,山只是攀登这种行为的目标。此外,对于“登山”这一位移事件除了ヲ格、ニ格之外,还有「山へ登る」这一位移表达式。如例(7)描写的以“山”作为目标的带有方向性的位移过程,整个位移动作的实施所涉及的场所并不在“山”的范围之内。
三种表达式反映的均是爬山这一客观状况,三者有着共同的认知框架:如图2所示,主体实施方向性位移动作,在某一场所的范围内进行位移,包括已到达该场所边界点B的阶段以及到达边界点B后在场所范围内进行位移的阶段。当如图2的①所示,认知焦点在于到达边界点B后的A→A’的整个位移过程时,用ヲ格标记,“山”实际指代的是主体实施位移动作的整个路径。然而,如图2的②,当用ニ格标记时,到达边界点B后的位移过程并没有得到突显,而是将认知焦点转移到该场所的边界点B,即ニ格标记的“山”作为认知参照点实际指代的是方向性位移动作到达的归着点。而如图2的③所示,「山へ登る」的认知焦点则是到达山的边界点B之前的位移过程,到达“山”的边界点以及到达后在“山”的领域范围内进行位移的过程并没有得到突显。
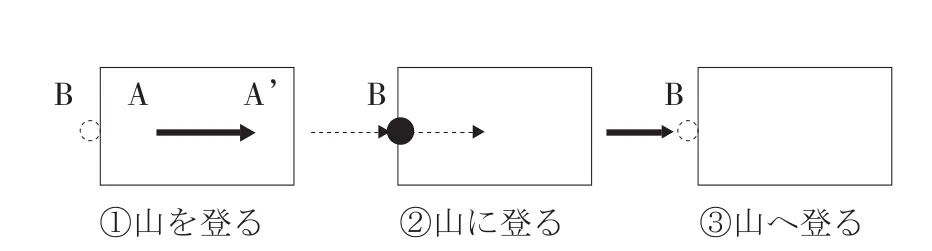
图2 方向性位移表达式的认知图式
然而,当场所名词由“山”变成“山顶”时却只能用ニ格标记。
“山顶”并不是「登る」位移动作的实施直接涉及的空间范围,也就是说,山顶并不能为位移路径的实现提供必要的空间条件,因而无法突显路径,不能用ヲ格标记。此时的“山顶”是作为空间上的一个点来认知,用来表示「登る」这一方向性位移动作最后实施的归着点。这一点也更加说明,对于两种表达式所反映的位移事件,ヲ格的认知焦点在于主体实施位移动作的整个路径,ニ格的认知焦点则是场所的边界点,用来表示主体实施位移动作最后的归着点。
接下来探讨的是表2中只有ニ格标记的“物体”“舞台”“二楼”这三类名词。
这三类名词与“山顶”一样,在位移事件中无法作为具有空间范围的场所,只能作为一个点状物体来认知,因而实现路径所依赖的空间条件无法满足,不能用ヲ格标记。此时,「二階」「ベッド」「舞台」是作为「上がる」这一具有自下而上方向性的位移动作所最终指向的归着点来认知,因而只能用ニ格标记。
然而,与之相对,表2“楼梯”“坡”类名词等却只能用ヲ格标记。
例(12)、(13)分别描写了沿着“楼梯”或“斜面”自下而上的位移过程。在这一位移事件中,“楼梯”是主体实现「上がる」这一方向性位移动作所必须依赖的空间范围。也就是说,“楼梯”“斜面”在「上がる」表示的位移事件中只能作为主体实施位移动作所直接涉及的空间范围,无法作为空间上的一个点来认知,因而无法用ニ格标记。「階段を上がる」的认知焦点在于主体在ヲ格场所的范围内沿着内在指定的方向进行位移所留下的轨迹,「階段」作为认知参照点实际指代的是整个位移路径。
综上所述,不管是方式性位移表达式,还是方向性位移表达式,ヲ格突显的都是主体在有一定空间范围的领域内实施位移动作形成的位移路径。与之相对,デ格和ニ格反映的都不是真正意义上的位移路径。デ格突显的是主体实施方式性位移动作的背景或范围,ニ格突显的则是实施方向性位移动作最后到达的归着点。
五、“ヲ格+位移动词”句式的事件结构特征
本节在上述分析的基础上,从位移事件的参与者及各自承担的语义功能、各参与者间的关系等方面,对表达路径语义的“ヲ格+位移动词”句式的事件结构特征进一步分析。
Talmy(1985)认为位移事件的构成具有以下几个要素:

Talmy(1985:64)认为,“路径”是位移事件成立的核心要素,世界上的语言根据“路径”要素是由动词还是附加语(包括接尾词、接头词、介词等)来表达可以大致分为两大类:动词框架语言和卫星框架语言。动词框架语言中,“路径”要素通常融合在位移动词中来表达,而卫星框架语言中,“路径”通常是由动词以外的附加语来表达。日语的路径概念通常是融合在位移动词中来表达,因而属于“动词框架语言”。
前面已经分析过,「通路を走る」的认知焦点是主体在通道的范围之内进行位移的路径。“路径”的实现必须依赖于具有空间范围的某一场所,否则便无法突显路径形成的全过程。因此,对于突显“路径”的位移事件来说,满足一定空间条件的场所是构成位移事件必须的参与者,也是主体实现位移路径的基础。因此,ヲ格标记的场所是位移事件构成的必须要素。

上节已经探讨过デ格和ニ格在位移事件中表达的不是位移的路径,例(15)「ビーチ」只是限定了主体实施游泳这一位移动作发生的范围,反映的是位移动作的发生以「ビーチ」为背景而非其他场所。同样,例(16)ニ格突显的是「上がる」这一方向性位移动作已经到达高速路这一边界点,「高速道路」实际指代的是位移动作最后到达阶段的归着点,是作为空间上的点来认知。也就是说,不管是デ格还是ニ格标记的场所都没有形成位移的路径,ニ格也只是路径上的一个点,不能反映主体空间位置的整个变化过程。在Talmy的位移事件构成要素中并不是事件构成的必须要素。
因此,“ヲ格+位移动词”反映的位移事件由主体和场所两个参与者构成,二者之间的互动关系是位移实现的基础。例(14)「通路」实际指代的是位移的整个路径,而路径的形成是以该场所为空间基础,主体持续性地对其实施位移动作的结果,因而场所成为主体实施位移动作的“对象”,进而成为主体控制域中的一部分。“路径”的实现是以位移主体与对象之间通过位移动作建立起的行为链关系为基础的。主体基于其控制地位是位移动作实施过程中行为链的起点,场所作为对象是行为链的终点,如图3所示。
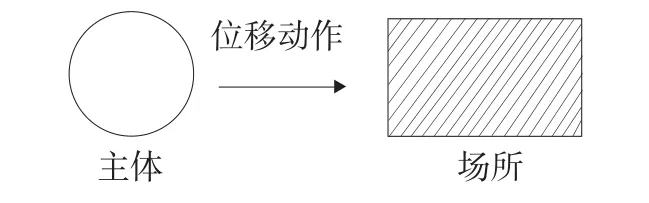
图3 “ヲ格+位移动词”句式的行为链模式
此外,通过研究表1和表2中ヲ格与其他格助词的语例数量关系也可以发现,对于主体在某一区域范围内进行位移的位移事件,日语更倾向于将它认知为主体实施位移动作所形成的路径,这种识解方式编码为“ヲ格+位移动词”,这一点与日语属于“动词框架语言”这一类型学特征是一致的。具体来说:
表1显示了ヲ格标记的名词种类和数量都远高于デ格,这表明对于方式动词构成的位移事件来说,日语更倾向于将动作发生的场所认知为主体实施位移动作能够控制的对象,也即整个位移路径,而不是将其认知为方式性位移动作实施的背景。
表2中的名词依据是否具有空间范围的特征大致分为两类,其中只有具备空间范围的名词才能够用ヲ格标记。并且,这种能够作为空间场所来认知的内在特征越明显,ヲ格的使用频率也越高,如表2“楼梯”“道路”“坡”这三类场所的使用频率最高,约占ヲ格名词总数的70%。此外,ニ格标记有范围的场所名词的使用数量是233(即除去通常作为点状物体来认知的“二楼”“物体”“舞台”这三类名词之后),远低于ヲ格的使用数量490。这一点也表明对于方向性位移动词构成的位移事件来说,相比于方向动词最终指向的归着点,日语更倾向于将具有空间范围的场所认知为位移动作实施过程中形成的轨迹。
由此可见,对于沿着某一路径实施位移动作的位移事件,日语更倾向于将有范围的场所作为路径来认知。只有当“路径”实现所依赖的空间条件不具备或不易被满足时,ヲ格的使用频率开始降低直至降为零,如“房间”“柱木”“二楼”“物体”“舞台”。其中“房间”类名词属于界限分明且封闭的内部空间,在表达路径的位移事件中更容易被视为空间上的一个点,表2ヲ格和ニ格语例数量的差异(6例vs39例)也证明了这一点。而“二楼”“物体”“舞台”这几类名词由于其完全不具备形成路径的空间条件,因而ヲ格的使用数量为零。这也说明了日语将场所认知为“路径”并编码为位移动词的动词框架语言特征。
六、结语
本文通过将“ヲ格+位移动词”表达式与其他格助词标记的位移表达式进行对比,分析了“ヲ格+位移动词”表达式的语义结构和事件结构特征。多种表达式的形成源于认知主体对同一认知框架内不同部分发生了认知焦点的转移。ヲ格突显的是位移动作形成的路径,而デ格、ニ格分别突显位移动作发生的背景或所限定的空间范围及动作实施指向的归着点。ヲ格与其他格助词的使用频率的差异也表明了日语更倾向于将满足一定空间条件的场所作为路径加以突显,这与日语属于动词框架语言这一类型学特征也是相符的。
注释:
① 例句出处:KOTONOHA 『現代日本語書き言葉均衡コーパス』(由日本国立国语研究所和文部省特定领域研究「日本語コーパス」项目共同开发完成)。
② 西村、野矢(2013:160-161)将其定义为「ある言語表現の複数の用法が、単一の共有のスキーマを喚起しつつ、そのフレーム内のお互いに異なる局面ないし段階を焦点化する現象」。
③ 关于Talmy(1985)位移事件的构成要素转自上野、影山(2001:49)。
[1] Talmy, L.1985.Lexicalization patterns: Semantic structure in lexical forms[A].In T. Shopen (ed.), Language typology and syntactic description Vol.Ⅲ: Grammatical categories and the lexicon[C].Cambridge: Cambridge University Press.
[2] 上野誠司 影山太郎.2001.移動と経路の表現[A].影山太郎.動詞の意味と構文[C].東京:大修館書店.
[3] 楠本徹也.2002.「ヲ」格における他動性のスキーマ[J].東京外国語大学留学生日本語教育センター論集,(28):1-12.
[4] 菅井三実.1999.日本語における空間の対格標示について[J].名古屋大学文学部研究論集,(45):75-92.
[5] 谷口一美.2005.事態概念の記号化に関する認知言語学的研究[M].東京:ひつじ書房.
[6] 寺村秀夫.1982.日本語のシンタクスと意味Ⅰ[M].東京:くろしお出版.
[7] 西村義樹 野矢茂樹.2013.言語学の教室―哲学者と学ぶ認知言語学[M].東京:中央公論新社.
[8] 三宅知宏.1996.日本語の移動動詞の対格標示について[J].言語研究,(12):143-168.
[9] 森山新.2003.認知言語学的観点から見た格助詞ヲの意味構造[J].台湾日本語文学報,(18):291-311.
[10] 山梨正明.1995.認知文法論[M].東京:ひつじ書房.
Research on Cognitive Grammar of the Formation Mechanism of “ヲ(Wo)+ Motion Verbs” in Japanese——Centering on the Semantic Meaning of “Path”
The paper, based on the opinions of cognitive linguistics, compares “de” structure , “ni” structure and “wo” structure. After the comparison, the paper explains thoroughly the semantic structure and event structure of the expression “wo+motion verbs” .The phenomenon that two expressions can be used to describe one objective event originates from the cognitive focus shift within different parts in the same cognitive framework. The cognitive focus of the “wo” structure lies in the path of the moving object, while that of the “de” structure and “ni”structure lies in the motion’s background and destination respectively. With the corpus analysis of the frequency of “wo”, “ni”and “de”structure, the thesis concludes that the higher frequency of “wo”expressions also indicates the motion verbs in Japanese belong to the verb-framed language.
path; cognitive focus; metonymy; event structure; verbframed language
H363
A
2095-4948(2015)02-0047-06
本文为大连外国语大学硕士研究生创新项目“日语位移事件表达式的认知语言学研究”(201384)的阶段性成果。
姚艳玲,女,大连外国语大学日本语学院教授,博士,硕士生导师,研究方向为日语语言学、汉日对比语言学;吴楠 ,女,大连外国语大学日本语学院硕士研究生,研究方向为日语语言学。
猜你喜欢
科技信息·学术版(2022年8期)2022-02-25 04:26:11
甘肃教育(2020年17期)2020-10-28 09:02:32
现代装饰(2020年7期)2020-07-27 01:28:32
数学物理学报(2020年2期)2020-06-02 11:29:10
安顺学院学报(2020年1期)2020-04-05 10:57:20
现代计算机(2019年6期)2019-04-08 00:46:50
小学生必读(中年级版)(2019年6期)2019-01-11 09:17:10
中国现当代社会文化访谈录(2016年0期)2016-09-26 08:46:13
文学教育(2016年27期)2016-02-28 02:35:10
商(2012年11期)2012-07-09 19:07:55