某球载稳定平台系统设计
2015-09-11 13:38:55仲崇峰李付军
电子机械工程 2015年6期
王 虎,仲崇峰,李付军,乔 扬
(中国电子科技集团公司第三十八研究所, 安徽 合肥 230088)
某球载稳定平台系统设计
王 虎,仲崇峰,李付军,乔 扬
(中国电子科技集团公司第三十八研究所, 安徽 合肥 230088)
针对球载稳定平台系统设计过程中存在的对重量与空间的严格限制等难点,文中着重从结构设计、伺服控制方面进行了阐述,并针对设计难点给出了解决方案与实现方法。通过合理设计和精心布局,找到了一种重量轻、承载力大的稳定平台系统,为今后类似的稳定平台设计提供了宝贵的理论和实践基础。
球载稳定平台系统;伺服控制;结构设计
引 言
系留气球装置作为飞机和卫星不可替代的一种全新概念的空中平台,可搭载各类电子装备,在气象探测以及远程通讯等军事和民用方面应用广泛,可以在时间和空间上弥补飞机和卫星的不足[1]。稳定平台系统为球载雷达的关键部分,其主要作用是消除或减弱系留气球姿态变化对雷达天线的影响[2],实现天线指向可控,并可驱动天线作预定扫描动作。随着球载平台功能的多样化,对其重量与空间的要求越来越苛刻。稳定平台系统在向着轻量化、小型化方向发展的同时对伺服系统的稳定性、可靠性提出了较高的要求。本文通过论述某型球载雷达稳定平台系统的结构设计和伺服控制方案的优化,探讨了轻量化设计、高精度实时运动补偿技术等关键技术的解决途径,并通过有限元仿真对结构设计的合理性进行了分析和验证。
1.环境的影响。当前,社会环境中各种享乐主义、拜金主义思想不断冲击着职工队伍,在挑战和考验面前,一些党员干部、项目管理人员的世界观、人生观、价值观、利益观发生扭曲,进而导致行为失范。
1 稳定平台系统结构设计
1.1 方位机构设计
如图1所示,方位机构主要由基座、方位驱动装置、旋转组合、回转支承以及拨叉组成。本设计采用电机不跟转(定轴转动)的方式,即方位驱动装置安装在基座上,回转支承的内圈、外圈分别与基座和俯仰转盘固定连接,通过方位驱动回转支承实现俯仰转盘的方位运动,这种定轴转动方案省去了为方位电机供电的大功率旋转组合,减少了通道数,同时也减轻了重量。
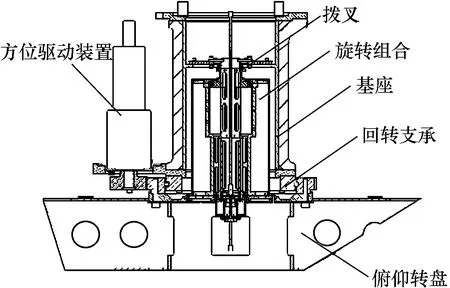
图1 方位机构示意图
设备挂架上的光信号、电信号经过旋转组合到达俯仰电机及天线设备,旋转组合下端安装在俯仰转盘上,通过拨叉实现相对运动。
2017年,为了进一步推动我国科技期刊的发展,提高其整体水平,更好地宣传和利用我国的优秀学术成果,中国科学技术信息研究所对中国正式出版的各学科6154种中英文期刊进行综合科学评价,遴选出新的300种以中文出版的中国精品科技期刊,其中《冶金分析》杂志有幸入选“第4届中国精品科技期刊”。中国科学技术信息研究所在中国精品科技期刊的基础上,择优遴选顶尖学术论文,建设了“中国精品科技期刊顶尖学术论文—领跑者5000(F5000)平台”,集中对外展示和交流我国的优秀科技论文,《冶金分析》同时为“中国精品科技期刊顶尖学术论文(F5000)”项目来源期刊。
2.2 驱动器
高性能负载回转支承的应用,既省去了轴承、轴以及方位齿轮等传动件,减轻了重量,又省去了齿圈的安装定位,因而方位机构更加紧凑可靠。
安装在天线阵面上的航姿测量系统直接实时输出天线的方位角度信息,用以参与闭环控制并被实时送达信号处理系统用于显示。
1.2 俯仰机构设计
由于天线阵面的重心距离俯仰轴远,偏心负载太大, 因此若采用传统的圆柱齿轮传动,虽然结构简单,加工方便,成熟度高,但要达到较高的承载能力,则传动比大,传动链级数多,稳定平台的驱动装置重量大[3],安全性差,无法满足研制要求。经过反复研究,俯仰机构拟采用电动缸驱动方式,如图2所示。该结构形式重量轻,比传统的圆柱齿轮传动驱动形式轻30%左右,提高了稳定平台系统的稳定性和与天线阵面的适装性[3]。

图2 俯仰结构设计
俯仰机构主要由俯仰转盘、电动缸、俯仰角度反馈装置等组成。电动缸的丝杠副两端加碟形弹簧,起缓冲保护和机械限位的作用,无需再设计专用的机械限位。通过三维仿真模拟,优化电动缸推点的位置,使得电动缸运行到一侧极限位置时,推杆末端不与安装在稳定平台上的分机发生干涉,同时保证满足俯仰驱动力矩要求。
3.1.1 系统化设计
2 伺服系统设计
对现有国内外软件的应用分析调研是搭建基于建筑信息模型架构的关键一步,通过应用分析,找出架构不合理和不足的部分,为重新架构明确方向,确定建筑模型的描述方法,为后续集成做好技术支撑。

图3 控制器功能框图
这是采访的好机会,记者怎么会放弃呢。一个扛着摄影机的人屁颠屁颠跟在记者后面,俩人跑到牛黄丸面前。记者对着话筒兴奋地朝他说,我们电视台首先代表全市人民向英雄致敬!接下来,我们想请你谈谈自己是如何勇斗歹徒的事情?说完就把话筒递到他的嘴前。
驱动器接收姿态测量系统送来的气球航向角信号、姿态角信号、角速度信号等,并接收控制器指令,控制天线运转,同时输出天线在地理坐标系下的角度。它由单片机最小系统、RS422接口、同步串行接口、A/D转换器、PWM功率放大器等组成,其功能框图如图4所示。

图4 驱动器功能框图
3 关键技术
将安装在天线框架上的3个分机合理集成于俯仰转盘上,使得天线框架的纵向尺寸大幅减小,刚度要求降低,重量大大减轻,同时也降低了俯仰的驱动功率。稳定平台系统的尺寸虽然增大了,但仍然在整个天线包络内,最终满足载荷系统的重量指标。图5为系统化布局形式。
系留气球对雷达重量和空间有严格的限制,在结构设计时必须进行轻量化设计。拟采用以下2种措施来加以保证:1)系统化设计,确定最佳的整体布局,从整个系留载荷系统上减轻重量;2)高性能负载比设计,选择合适的驱动方式,通过合理的集成,优化内部结构设计。
(三)识记汉字低年级学生是记性好,忘性大地。针对这个特点,应该及时地巩固。巩固一定要多次数,多数量,当然也要多方法,比如采取小火车快快开,看谁记性好,谁当小老师等多富趣味性地方法会让学生在保持积极地状态下更牢固地记住生字。
通过前期对稳定平台结构设计方案的优化,确定了驱动方案,然而整个载荷系统仍然超重。因此需对整个载荷系统进行系统化设计,以最终实现轻量化目标。
3.1 轻量化设计技术

图5 系统化布局形式
3.1.2 高性能负载比设计
根据俯仰转盘跨度大、悬臂承重等特点,需对其进行高性能负载比设计,如图6所示。拟采用铝板拼焊而成,材料选用焊接性能良好的5A06,主承力框架由中心圆筒及6块主支撑板组成,呈辐射状排布。在满足空间尺寸包络要求的条件下,增加俯仰转盘桁高,以减轻自重及增大刚度。此外,主吊耳承受整个天线的重量,该部位通过斜拉板与上平面相连,局部加筋板,以增加其刚强度,同时采取有效措施,减小应力集中。根据仿真分析结果,对俯仰转盘进行进一步优化设计,以提高负载比。

图6 俯仰转盘结构设计
控制器的功能包括接收信号处理指令,发出驱动信号给驱动器,控制天线启动或停转;接收姿态测量系统输出的天线航向、姿态等信号。经过判断处理后,将稳定平台系统的工作状态、方位角度、俯仰角度等送给信号处理单元。控制器由单片机最小系统、RS422接口、同步串行接口等组成,其功能框图如图3所示。
3.2 高精度实时运动补偿技术
方位和俯仰轴的控制采用经典PI控制,将姿态测量系统直接安装在天线安装板上,输出的3个角度就是天线的方位角、俯仰角和横滚角,同时,它还可以输出天线3个方向的旋转角速度。驱动器根据给定角度和姿态测量系统输出的角度进行比较,得到角度误差,进行位置环放大与校正,形成位置闭环控制。位置环输出的速度控制量再与姿态测量系统输出的角速度进行比较,得到基于地理坐标系的角速度误差,进行速度环放大与校正,形成速度闭环控制[4]。电流闭环由PWM功率放大器电路SA03构成,直接驱动直流电机。位置环、速度环和电流环这3个闭环系统,通过调节放大倍数和积分时间常数,可以改变系统的稳定精度和响应速度。PI控制框图如图7所示。

图7 PI控制框图
2.1 控制器
每个人与他人他物打交道之时,首先是站在自身角度出发看待对象,不论是人还是物质,都会被冠以客体之名,并以对象的身份待之。人人是主体,主体是人人,但人类总是缺乏换位思考的能力,在自我主体与互为客体的交往行为当中,必定会引起对方的不满与抵制,导致人际关系的紧张与不睦,这将是人之主体的矛盾所在。他人的对象客体化,对他人主体性的确立产生强烈的冲击,人与人关系的定位陷入互相制约之中,而非相互进步。在社会实践过程中,避免不了人与人的相互交涉,“我”既是自我眼中的主体,也是他人眼中的客体,人与人之间的主体与客体处于相互倒转的状态。相互局限在片面的表象中,践行自我的主体之姿,限制人类主体地位向完满状态的通达。
4 仿真分析
稳定平台系统的刚强度是设计分析中的一个关键环节,刚度不足会使伺服系统不稳定,强度不足会破坏系统,甚至影响其安全性。为了满足轻量化的设计要求,本文采用有限元分析软件对不同工况下的俯仰转盘进行了优化设计和刚强度计算。有限元模型共有1 437 865个节点和1 662 341个单元,如图8所示。详细的有限元计算结果见表1。

图8 有限元模型
费洛姆这样描述父亲的爱,父亲的爱是有条件的:“我爱你,因为你满足了我的要求;我爱你,因为你尽到了你的职责;我爱你,因为你像我。”[7]59-61可惜,天生羸弱且宣称自己是“最瘦的人”的卡夫卡与父亲心中的期望相差甚远。

表1 各工况下的刚强度响应
如图9所示,天线骨架的最大变形发生在沿OX轴横滚23°且受到法向(Z向) 3 m/s2过载时,最大位移出现在天线骨架底部,为5.3 mm,满足刚性要求。
毫无疑问,以上的文献构成了本文的研究基础。但是他们对贸易便利化与贸易边际增长关系的研究都基于二元边际层面,并未将集约边际深入分解为数量边际和价格边际,从而不能更为全面地揭示物流绩效水平改善带来的可观的贸易带动效果。对此,本文从三元边际——扩展边际、数量边际和价格边际的角度,来分析“一带一路”物流绩效指数 (LPI)及6个分项指标对中国机械运输设备出口的影响。

图9 天线骨架最大变形
如图10所示,最大应力为34.1 MPa,发生在OX轴横滚23°且受到法向(X向) 5 m/s2过载时,取安全系数1.5,则最小剩余安全裕度为1.5 > 0,满足强度设计要求。

图10 俯仰转盘最大应力
5 结束语
本文从结构设计、伺服控制等方面详细阐述了一种球载雷达稳定平台系统设计。为满足轻量化要求,通过合理的载荷系统布局及驱动方案选择,找到了一种新型的简单可靠的机械结构, 获得了较高的负载比,同时仿真结果满足指标要求。目前该稳定平台系统已进入实际应用阶段,运行良好, 各方面指标均满足设计要求。
[1] 冯强. 气球载监视雷达定位系统研究[D]. 西安: 西安电子科技大学, 2010.
[2] 陈昌胜, 赵攀峰. 系留气球载雷达系统分析[J]. 雷达科学与技术, 2007, 5(6): 410-414.
[3] 吴金彪. 滚珠丝杠副在天线座稳定平台中的应用[J]. 舰船电子对抗, 2008, 31(2): 116-117.
[4] 王振收. 机载SAR稳定平台直流力矩电机驱动器[J]. 现代雷达, 2006, 28(3): 70-75.
王 虎(1986-),男,工程师,主要从事雷达机电传动设计工作。
仲崇峰(1983-),男,高级工程师,主要从事弹载雷达结构设计工作。
Design of a Balloon-borne Stable Platform System
WANG Hu,ZHONG Chong-feng,LI Fu-jun,QIAO Yang
(The38thResearchInstituteofCETC,Hefei230088,China)
To solve the strict restrictions of weight and dimension in the balloon-borne stable platform system, the structure design and servo control are expounded and the design method and realization process are introduced in this paper. A stable platform system,which has the characteristics of light weight and high-carrying capacity, is found through reasonable design and careful layout. It can provide valuable theoretical and practical basis for the design of the similar stable platform system.
balloon-borne stable platform system; servo control; structure design
2015-07-28
TN959.73
A
1008-5300(2015)06-0035-04
猜你喜欢
建材发展导向(2023年6期)2023-03-31 02:51:38
幼儿园(2021年12期)2021-11-06 05:10:20
建材发展导向(2021年13期)2021-07-28 07:15:50
中国交通信息化(2017年10期)2017-06-06 07:13:20
电子制作(2016年1期)2016-11-07 08:42:54
学习月刊(2016年19期)2016-07-11 01:59:46
中国修辞(2016年0期)2016-03-20 05:54:32
中国房地产业(2016年2期)2016-03-01 01:25:23
幼儿100(2016年28期)2016-02-28 21:26:17
中国房地产业(2016年24期)2016-02-16 06:10:22