一种适用于生物反应器观察的生物显微镜设计
2015-09-11 14:22于源华
中国生物医学工程学报 2015年4期
徐 兵 于源华 李 琦 宫 平*
1(长春工业大学机电工程学院, 长春 130012)2(长春理工大学生命科学技术学院, 长春 130022)
一种适用于生物反应器观察的生物显微镜设计
徐 兵1于源华2李 琦2宫 平2*
1(长春工业大学机电工程学院, 长春 130012)2(长春理工大学生命科学技术学院, 长春 130022)
基于目前国内对“细胞工厂”生物反应器在使用过程中监测方法的局限性,为了在原位高效实时地监测细胞工厂中细胞的生长状况,提高疫苗等生物药物企业的生产效益,提出一种通过细胞工厂透明侧壁进行倾斜的对细胞观测的方法,并设计出用于监测细胞工厂中所培养细胞的卡塞格林反射式长工作距显微物镜;同时,针对该观测装置,设计了采用单神经元自适应PI控制算法的伺服控制系统。显微物镜放大倍率为5×,工作距离为85 mm,数值孔径NA为0.3,可分辨的最小距离为1.1 μm,伺服控制系统重复定位精度为5 μm,重复性能良好,自动观察一个40层细胞工厂仅需2 min。
显微;细胞工厂;长工作距;自适应PI
引言
细胞工厂(cell factory)是一种用于大规模细胞培养的多层叠板式细胞培养装置,相邻两层培养叠板间距离仅17 mm。特有的设计使得单位体积内大大增加了细胞培养表面积,并且可以保证操作的无菌性,最大限度降低批间差异,使疫苗、单克隆抗体、生物药物等的生产规模放大变得简单易行,细胞工厂的应用实现了细胞培养的操作规程化[1]。
近年来,我国细胞工厂培养技术迅速发展,因此生产企业需要对细胞工厂培养技术进行实时质量监控。传统的细胞培养技术采用转瓶培养,利用普通的倒置显微镜对转瓶内的细胞进行观察和质量评价。然而,细胞工厂是多层固定的叠板式细胞培养装置,倒置显微镜无法实施观察。目前,仅日本4国精密仪器公司拥有对细胞工厂的相关自动监控技术,产品单价在300万元人民币以上,并且该产品仅能观察细胞工厂内的一条线区域,观察面积较小。目前,国内没有相关技术及产品。
由于所培养的细胞为贴壁细胞,它们附着在细胞工厂叠板底面。笔者提出了一种将光学系统倾斜、透过细胞工厂透明的侧壁从所培养细胞底部进行观察的方法,并分别对显微光学系统及伺服控制系统进行了设计及试验。由此,自主研发了可实现对多层细胞工厂培养皿中的细胞进行实时自动观测的新型装置。
1 对细胞工厂观测原理
由于细胞工厂结构的限制,采用传统的观测方式无法对细胞工厂内部贴壁生长的细胞进行观察。细胞工厂材质为符合《美国药典》规定的聚苯乙烯,它的侧壁是透明的,这样就可以利用一个具有大的倾斜观测角的显微观察装置,透过细胞工厂透明的侧壁,对上一层培养皿底面上贴壁生长的细胞进行观测,观测原理如图1所示。

图1 显微镜的观测原理Fig.1 Schematic diagram of microscope observation principle
通过几何关系可知,口径为60 mm的显微镜头以30°的角度观察时,为使水平方向可观察距离x>50 mm,则要求显微镜头的工作距离大于80 mm。同时,由于观察角度较大,导致物面与光轴是倾斜的,因此还要求光学系统拥有较大的景深。
通过伺服控制系统控制细胞工厂和倾斜的长工作距显微镜的运动,可实现自动观测的目的,可分别观测到细胞工厂1~40层侧边一个矩形区域内的细胞生长状况,通过将细胞工厂旋转一面的观察,就可以看到另一侧的一个矩形区域内细胞生长状况,大大增加了可观测面积。细胞工厂内细胞培养表面的宽度为200 mm,当水平方向可观察距离x=50 mm时,细胞工厂被观察面积达到了50%,观察率远大于日本同类产品。
2 长工作距显微光学系统设计
由细胞工厂单层尺寸(335 mm×205 mm×17 mm)决定,为了清晰全方位地观察细胞,需要显微镜头在具备较高分辨率和放大倍率的情况下,还要有较长的工作距离。通过对相关参数的计算,要求该光学系统的工作距要大于80 mm,而超长的工作距离给光学设计带来困难。
因此,在设计上采用李斯特显微物镜作为初始结构形式,后方为卡塞格林系统,光学系统结构如图2所示。以李斯特显微物镜的两组双胶合透镜中心为对称轴,光学系统结构近似对称,可对垂轴像差(即彗差、畸变、垂轴色差)有效减小。初始结构中第一组负光焦度的双胶合透镜弯向光阑,可以有效校正像散[2-7]。

图2 初始结构Fig.2 Initial structure diagram
笔者选用像元尺寸为3.75 μm,最高分辨率为1280×960的120万像素CCD高分辨率工业数字相机,通过计算得出光学系统的相关参数。
其中,像高为
(1)

(2)
根据经验,当线视场高度2y小于物镜焦距的120时,CCD相机的成像质量是满意的,设计所选取的是1/3英寸的CCD传感器,根据公式要求,线视场2y=1.2 mm,物镜焦距为60 mm,满足上述条件[8]。
通过对光学系统初始结构进行像差分析校正,经优化后最终设计结果如图3所示,光学系统的长度为461.9 mm,工作距离为85 mm,放大倍率β=5×,数值孔径NA=0.3,线视场物高2y=1.2 mm,系统的遮拦比为30%。

图3 最终结构示意图Fig.3 Final structure diagram
光学系统的成像质量评价参数:光学调制传递函数(MTF)曲线、不同物方线视场(OBJ)的光线在像面(IMA)中呈现的点列图以及系统能量图分别如图4中(a)~(c)所示。
从图4(a)MTF传递函数特征曲线可以看出,当物方线视场为0 mm、0.35 mm和0.6 mm,子午方向的传递函数(T)和弧矢方向的传递函数(S)在中频66 lp/mm处MTF值大于0.5,在高频133 lp/mm,即CCD截止频率时MTF值约为0.3,并且各个视场的子午面和弧矢面重合较好,有较好的成像质量。
从图4(b)不同物方线视场的光线在像面中呈现的点列图中可以看出,光学系统的弥散斑大小非常接近爱里斑直径,并且物方线视场为0、0.35、0.6 mm的光线在像面上的均方根弥散斑分别为3.19、1.939、2.883 μm,均小于所选用的CCD相机的像元尺寸3.75 μm,因此该光学系统有很好的分辨率,成像质量良好,不会因为受到杂散光的影响导致弥散斑过大,分辨不清细胞图像。
从图4(c)系统能量图中可以看出,光学系统能量集中度较高,通过系统到达探测器的光能高,光学系统成像清晰,满足适用于生物反应器观察的生物显微镜的使用要求。
3 伺服控制系统设计
3.1 细胞工厂自动监测装置机械结构
在对细胞工厂的观察过程中,倾斜光学显微镜头与其照明系统相对位置固定。在移动过程中,为使观察检测目标不脱离观测视场,要求机械系统具有较高的传动稳定性和传动精度,运动采用闭环控制。监测装置的机械结构以及各轴的定义如图5所示。

图5 细胞工厂自动监测装置的机械结构Fig.5 The mechanical structure diagram of cell factory automatic monitoring device
监测装置4轴分别为:光学系统水平轴(X轴)、光学系统竖直轴(Y轴)、细胞工厂进给轴(Z轴)、细胞工厂旋转轴(W轴)。在监测装置机械结构中,机座是监测装置的底座,旋转机构和竖直运动机构均安装在机座上,通过控制4轴的运动,实现光学系统相对于细胞工厂按照需要进行相对位置移动。
进给机构将细胞工厂移动到光学系统的视场中,通过控制竖直运动机构控制光学系统到达细胞工厂所需观测层的位置。水平移动机构控制光学系统到达细胞工厂被观测层的观测位置,继续控制水平轴运动开始对细胞工厂内部细胞进行深度方向的一维观测,通过控制进给机构移动细胞工厂某实现对细胞工厂被观测层的二维观测,可观测一个矩形区域。观测完细胞工厂的一个侧面之后,控制旋转机构使细胞工厂旋转180°,继续对细胞工厂的另一个侧面进行观测,从而实现对细胞工厂内所培养细胞的全局观测。
3.2 控制系统硬件结构
该生物显微镜的控制系统主要由人机交互系统、主控制器、伺服控制系统、通信系统等组成,控制系统结构如图6所示。

图6 细胞工厂自动监测装置控制系统结构Fig.6 The control system structure diagram of cell factory automatic monitoring device
伺服控制器A、B、C、D分别控制运动轴X、Y、Z、W的伺服电机M。人机交互系统是细胞工厂自动监测装置的人机交互工具,通过RS485通信与主控制器进行数据交互。该系统的主要功能是:检测控制系统的状态信息,并接收其发来的数据,显示显微光学系统的当前位置;向主控制器发送伺服驱动器控制命令和控制参数;向主控制器发送CCD相机图像采集控制命令;向主控制器发送编译好的自动控制程序及控制命令;错误报警、故障检测及紧急事件响应。
主控制器是细胞工厂自动监测装置控制系统的核心,其处理器主要由 DSP模块和FPGA模块组成,其中DSP采用TI公司的浮点型DSP-TMS320F28335芯片,FPGA采用Altera公司的EP3C40F324芯片[9]。FPGA可以完成高速并行硬件操作,因其不适合浮点运算,所以采用 32位的高速数字信号处理器DSP来完成浮点运算。针对DSP和FPGA芯片的各自特点,对控制器进行功能划分,如图7所示。以DSP芯片作为主控制器,主要负责接收人机交互系统发送的速度指令,完成速度环和电流环的计算;以FPGA芯片作为协控制器,主要负责和伺服系统间的通信、伺服电机转速的计数、PWM控制信号的调制以及系统故障处理等功能。

图7 主控制器功能Fig.7 Function block diagram of main controller
DSP芯片通过其内部的XINTF接口,分别扩展SRAM和FLASH两个外部存储芯片。SRAM主要作为在程序运行时的内存,在其中存储了相应的控制信息,便于对控制系统的性能进行分析;FLASH芯片在DSP启动时用于加载程序。通过PWM波定时器产生的中断,DSP芯片不断读取来自FPGA的转速计数信号和电流采样信号;DSP芯片通过运行速度环的控制算法和电流环的矢量控制算法,得出相应的控制指令并发送给FPGA,完成与FPGA间的通信。FPGA芯片作为协控制器来辅助DSP进行控制,其采用模块设计方式将FPGA需要完成的功能分为各个独立的功能模块,并在顶层实体中对各个独立的功能模块进行直接调用。FPGA的功能模块主要为A/D采样模块、PWM产生模块、通信模块、转速计数模块及故障保护模块。
3.3 控制算法实现
该生物显微镜采用永磁同步电机作为动力源,控制算法主要由电流环和速度环组成,控制结构如图8所示。为使电磁力矩最大,则要求电流环的直轴电流分量Id=0,使电流环可以实时、准确地捕获电流指令信号,因此其控制器采用系统响应快并且能消除静态误差的PI控制器。

图8 永磁同步电机控制结构Fig.8 Structure of permanent magnet synchronous motor control
速度环可以有效增强系统的抗负载扰动能力,抑制速度波动,实现稳态无静差。该生物显微镜的图像采集系统采用帧率为30 fps的120万像素1/3″Gige千兆网口CCD工业相机,在显微光学系统实时运动时,为观察实时图像,要求该系统运动速度波动非常小。显微光学系统与其光源固定在同一个C形支架上进行运动,整个运动体的质量较大,惯性较大,当处于低速运行时,导轨的摩擦等非线性因素造成低速运动的抖动,影响对细胞的观测质量。常规的PI控制算法并不能很好地解决该生物显微镜低速平稳运行问题,因而采用一种单神经元自适应PI控制器对永磁同步电机进行控制,实现对生物显微镜低速状态下的控制[10]。
控制器输入为r(k),输出为y(k),控制所需的状态变量为x1(k)、x2(k),状态变量的形式与常规PI控制相同,单神经元通过对加权系数的调整来实现自适应学习功能,因此单神经元自适应PI控制算法具体可以表示为
(3)
(4)
(5)
(6)
(7)
式中,K为神经元比例系数,ωi(k)为对应xi(k)的加权系数,ηi为比例、积分作用的学习率。
通过现场调试,调整比例系数K和学习率ηi就可以使系统获得较佳的运行效果。经调试后伺服控制系统重复定位精度为5 μm,自动观察一个40层细胞工厂仅需2 min。
4 实验结果
所研制完成的用于观察细胞工厂的生物显微镜如图9所示。
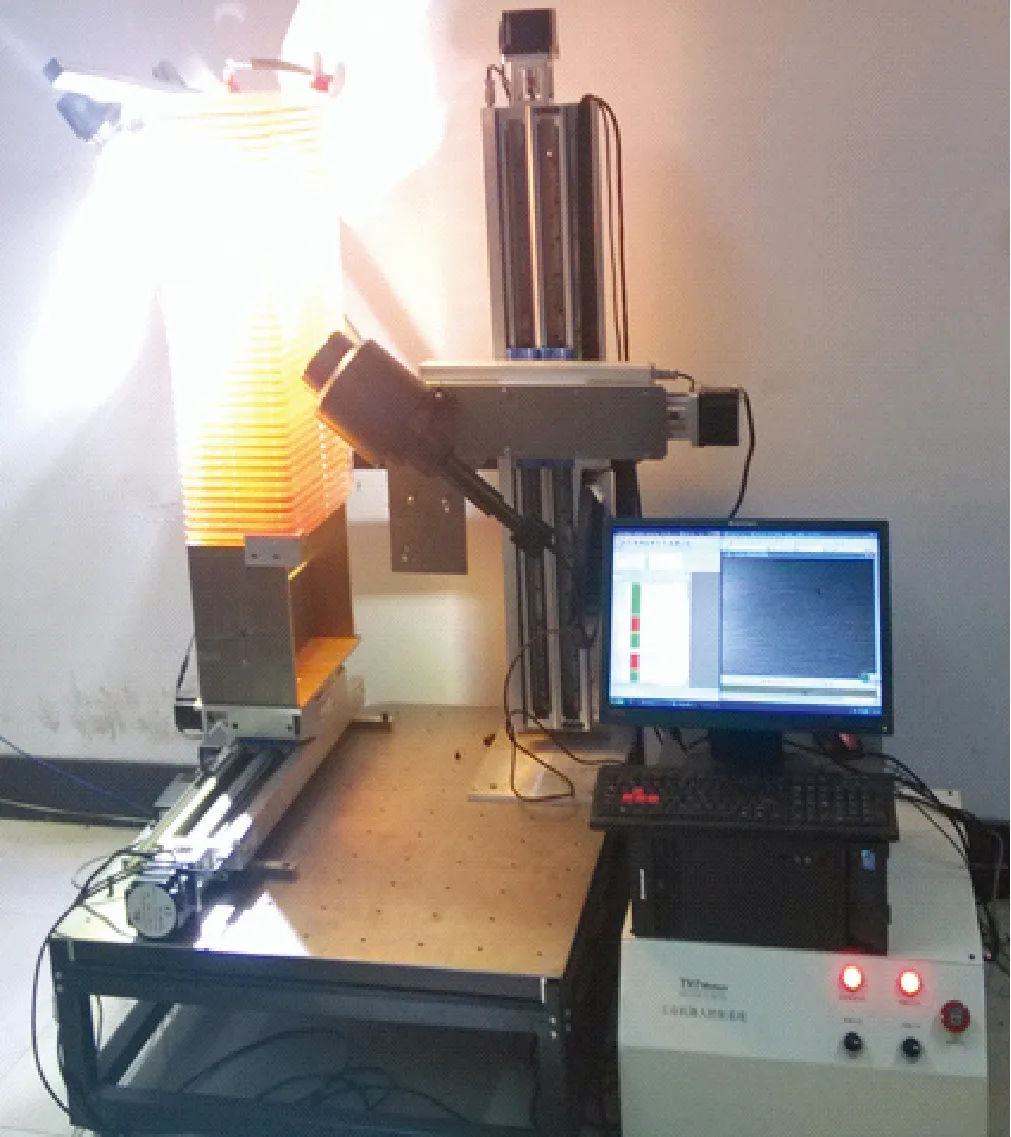
图9 细胞工厂生物显微镜Fig.9 The physical diagram of cell factory automatic monitoring device
利用该显微镜对细胞工厂进行了大量的观测实验,图10(a)、(b)、(c)分别是细胞工厂中第10、20、30层观察到的人源二倍体细胞,图10(d)为应用尼康倒置显微镜对单层细胞工厂中培养的人源二倍体细胞的观测结果。可以看到,该生物显微镜观察到的细胞工厂中各层细胞的界限分辨得很清楚,连续动态观察时稳定性较好。
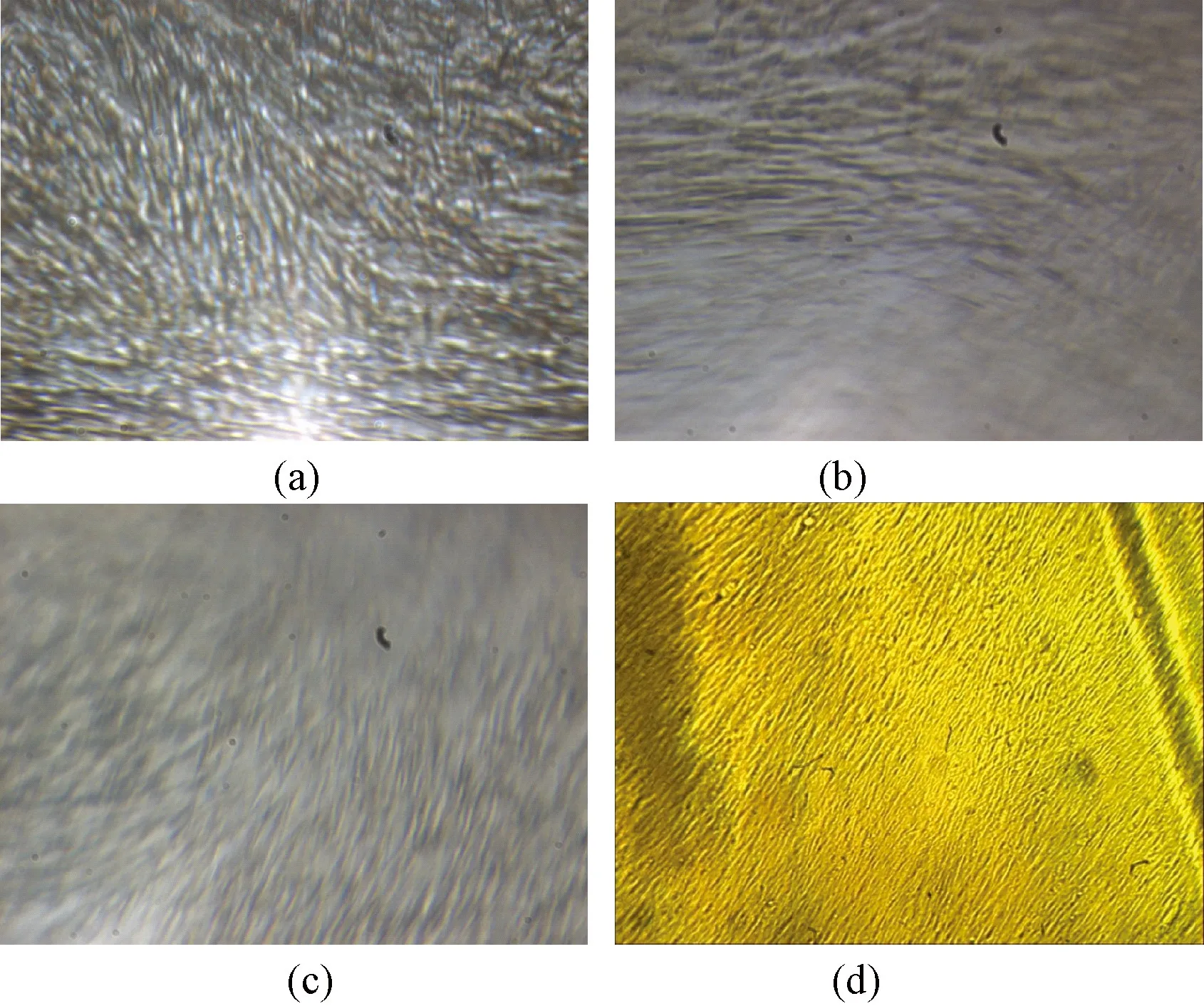
图10 细胞工厂中细胞观察效果。(a)第10层细胞;(b)第20层细胞;(c)第30层细胞;(d)尼康显微镜观察到的细胞Fig.10 Observing effect of cells in cell factory. (a)The 10th layer of cells; (b)The 20th layer of cells; (c)The 30th layer of cells; (d)The cells by Nikon microscope
5 结论
本研究首先利用ZEMAX光学设计软件,设计了一种适用于生物反应器观察的生物显微镜的光学系统,并设计了采用单神经元自适应PI控制算法的伺服控制系统。最终得到最小分辨距离为1.1 μm,可连续观察细胞工厂培养皿中细胞生长状态的
生物显微镜。光学系统成像质量优良,机械结构简单紧凑,控制精度较高,重复性能良好。
[1] 李琦, 向阳, 谷俊达, 等. “细胞工厂”显微监测装置的光学设计[J]. 中国激光, 2014, 41(10):267-272.
[2] 张小波, 范富明, 程良伦. 激光三角法改进的显微镜快速自动对焦方法[J]. 红外与激光工程, 2012, 41(7): 1784-1791.
[3] Sinclair MB, de Boer MP, Corwin AD. Long-working-distance incoherent-light interference microscope[J]. Applied Optics, 2005, 44(36): 7714-7721.
[4] Tan Jiubin, Wang Chao, Wang Yuan, et al. Long working distance microscope with a low obscuration aspherical schwarzschild objective[J]. Optics Letters, 2014, 39(23): 6699-6702.
[5] 李雅灿, 邱丽荣, 张鹏嵩, 等. 便携式多光轴平行性检校系统的研制[J]. 中国激光, 2013, 39(10): 143-147.
[6] 刘智颖, 付跃刚, 胡源. 基于环形衍射理论的反射式光学系统研究[J]. 光子学报, 2009, 38(9): 2265-2269.
[7] 韩海媚,萧泽新.基于MTF的显微物镜景深的仿真测量[J].红外与激光工程, 2008,37(S1):312-315.
[8] 朱越, 高万荣. 全场高分辨生物组织光学层析成像[J]. 中国激光, 2014,41(8): 114-121.
[9] 邓永停, 李洪文, 王建立, 等. 基于卡尔曼滤波器的交流伺服系统自适应滑模控制[J]. 光学精密工程, 2014, 22(8): 2088-2095.
[10] 邓永停, 李洪文, 王建立, 等. 基于 DSP 和 FPGA 的望远镜伺服控制系统设计[J]. 红外与激光工程, 2014,43(3):908-914.
The Biological Microscope Design Applied to Observe Bioreactor
Xu Bing1Yu Yuanhua2Li Qi2Gong Ping2*
1(CollegeofMechanicalandElectricalEngineering,ChangchunUniversityofTechnology,Changchun130012,China)2(SchoolofLifeScienceandTechnology,ChangchunUniversityofScienceandTechnology,Changchun130022,China)
microscopy; cell factory; long working distance; adaptive PI
10.3969/j.issn.0258-8021. 2015. 04.017
2015-01-01, 录用日期:2015-06-30
吉林省科技发展计划项目(20130204035GX)
TN247
D
0258-8021(2015) 04-0501-06
*通信作者 (Corresponding author),E-mail: gongmch@126.com
猜你喜欢
天天爱科学(2022年4期)2022-11-08
现代电子技术(2022年18期)2022-09-17
科学技术创新(2021年25期)2021-09-11
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
小学科学(学生版)(2019年11期)2019-12-09
中国医疗设备(2019年1期)2019-01-15
制造技术与机床(2017年6期)2018-01-19
北京航空航天大学学报(2017年1期)2017-11-24
儿童故事画报·发现号趣味百科(2016年7期)2017-02-08
舰船科学技术(2015年8期)2015-02-27