ROV水下作业仿真系统的研究
2015-09-11 22:59陈祥余宋磊尚宪朝钟朝廷
科技与创新 2015年17期
关键词:海洋工程
陈祥余 宋磊 尚宪朝 钟朝廷
摘 要:基于水下环境复杂和作业难度大等特点,为了实现水下ROV作业培训,建立了ROV作业视景仿真系统的关键技术方法,进行了ROV和脐带缆的受力分析,讨论了ROV-缆系统运动数学模型的建立方法和求解方法,重点分析了ROV操纵性能预报和运动仿真方法。通过典型工况下ROV直航运动和回转运动的仿真结果可看出,脐带缆主要影响ROV的纵向运动性能。因此,在VegaPrime环境下进行了ROV作业培训的视景模型驱动、碰撞检测、视点切换和软件界面开发等工作,实现了交互的ROV水下作业仿真系统。
关键词:遥控式水下机器人;柔性脐带缆;海洋工程;ROV
中图分类号:TP391.9;TB24 文献标识码:A DOI:10.15913/j.cnki.kjycx.2015.17.004
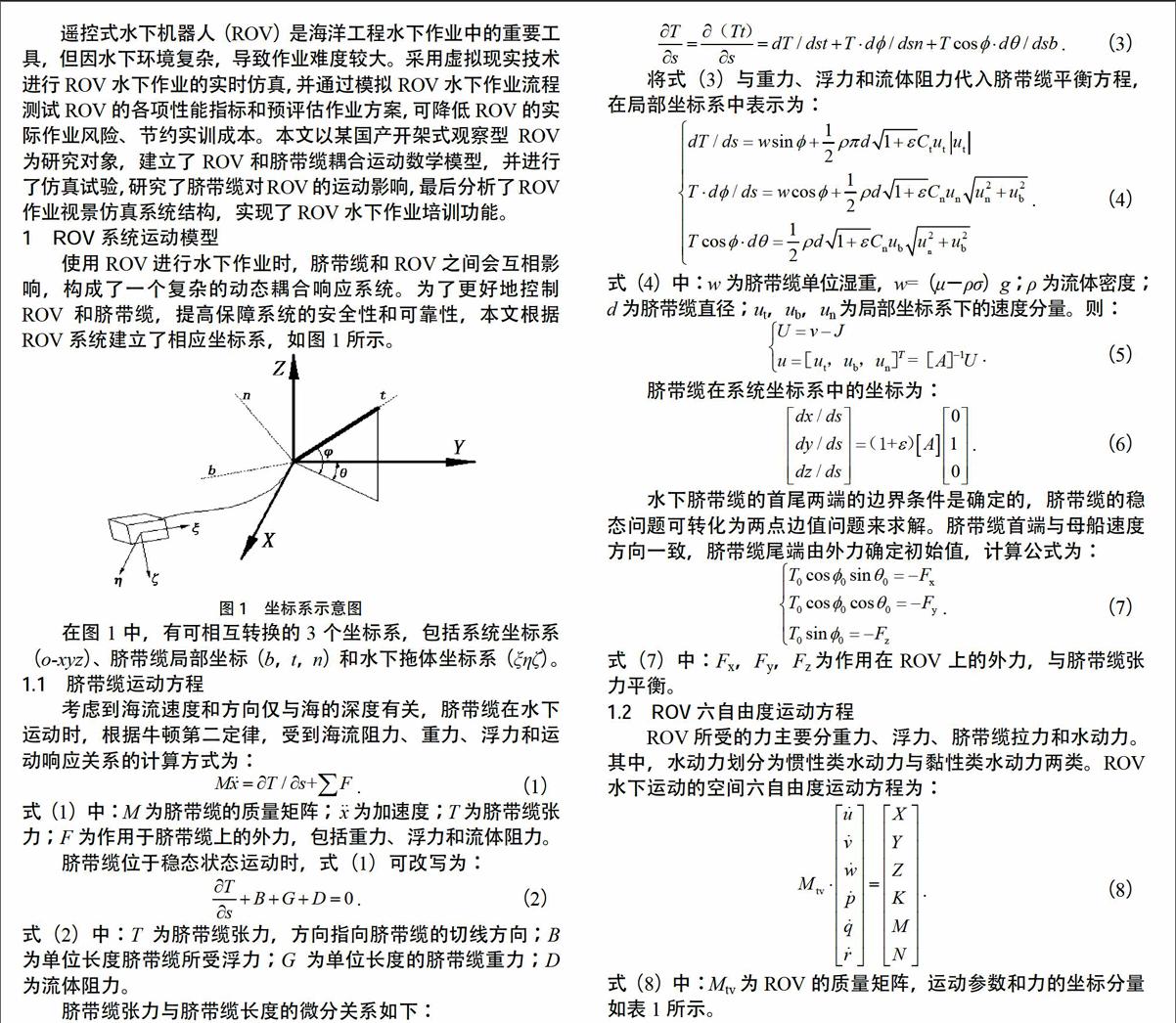
遥控式水下机器人(ROV)是海洋工程水下作业中的重要工具,但因水下环境复杂,导致作业难度较大。采用虚拟现实技术进行ROV水下作业的实时仿真,并通过模拟ROV水下作业流程测试ROV的各项性能指标和预评估作业方案,可降低ROV的实际作业风险、节约实训成本。本文以某国产开架式观察型ROV为研究对象,建立了ROV和脐带缆耦合运动数学模型,并进行了仿真试验,研究了脐带缆对ROV的运动影响,最后分析了ROV作业视景仿真系统结构,实现了ROV水下作业培训功能。
1 ROV系统运动模型
使用ROV进行水下作业时,脐带缆和ROV之间会互相影响,构成了一个复杂的动态耦合响应系统。为了更好地控制ROV和脐带缆,提高保障系统的安全性和可靠性,本文根据ROV系统建立了相应坐标系,如图1所示。
在图1中,有可相互转换的3个坐标系,包括系统坐标系(o-xyz)、脐带缆局部坐标(b,t,n)和水下拖体坐标系(ξηζ)。
1.1 脐带缆运动方程
考虑到海流速度和方向仅与海的深度有关,脐带缆在水下运动时,根据牛顿第二定律,受到海流阻力、重力、浮力和运动响应关系的计算方式为:
式(1)中:M为脐带缆的质量矩阵; 为加速度;T为脐带缆张力;F为作用于脐带缆上的外力,包括重力、浮力和流体阻力。
脐带缆位于稳态状态运动时,式(1)可改写为:
式(2)中:T为脐带缆张力,方向指向脐带缆的切线方向;B为单位长度脐带缆所受浮力;G为单位长度的脐带缆重力;D为流体阻力。
脐带缆张力与脐带缆长度的微分关系如下:
将式(3)与重力、浮力和流体阻力代入脐带缆平衡方程,在局部坐标系中表示为:
式(4)中:w为脐带缆单位湿重,w=(μ-ρσ)g;ρ为流体密度;d为脐带缆直径;ut,ub,un为局部坐标系下的速度分量。则:
脐带缆在系统坐标系中的坐标为:
水下脐带缆的首尾两端的边界条件是确定的,脐带缆的稳态问题可转化为两点边值问题来求解。脐带缆首端与母船速度方向一致,脐带缆尾端由外力确定初始值,计算公式为:
式(7)中:Fx,Fy,Fz为作用在ROV上的外力,与脐带缆张力平衡。
1.2 ROV六自由度运动方程
ROV所受的力主要分重力、浮力、脐带缆拉力和水动力。其中,水动力划分为惯性类水动力与黏性类水动力两类。ROV水下运动的空间六自由度运动方程为:
. (8)
式(8)中:Mtv为ROV的质量矩阵,运动参数和力的坐标分量如表1所示。
*[基金项目]国家科技重大专项“海洋深水工程重大装备及配套工程技术”(项目编号:2011ZX05027-005)
为了更精确地描述ROV的运动轨迹,引入了动力学耦合边界条件,因此,ROV的运动方程改写为:
. (9)
脐带缆初始节点平动质量矩阵从惯性坐标系到随体坐标系的转换矩阵为Mc0,为6×6矩阵。
1.3 ROV辅助运动方程
ROV的姿态角同角速度的关系为:
. (10)
ROV在系统坐标系中的速度为:
. (11)
综上所述,根据拖稳态运动控制方程、ROV六自由度运动方程和ROV辅助运动方程组成的运动微分方程组,计入动力学耦合条件后通过运动边界条件关联,采用四阶龙格库塔积分进行数值求解,可得到惯性坐标系中ROV的位置、速度、角速度和姿态角,以及脐带缆节点的位置速度。
2 仿真数值实验
基于上述建立的ROV运动数学模型、ROV的运动情况、脐带缆与ROV耦合情况,控制推进器电压进行了特定海况下ROV直航和回转运动数值仿真试验,进而分析了脐带缆与ROV耦合作用对ROV运动性能的影响
2.1 直航运动
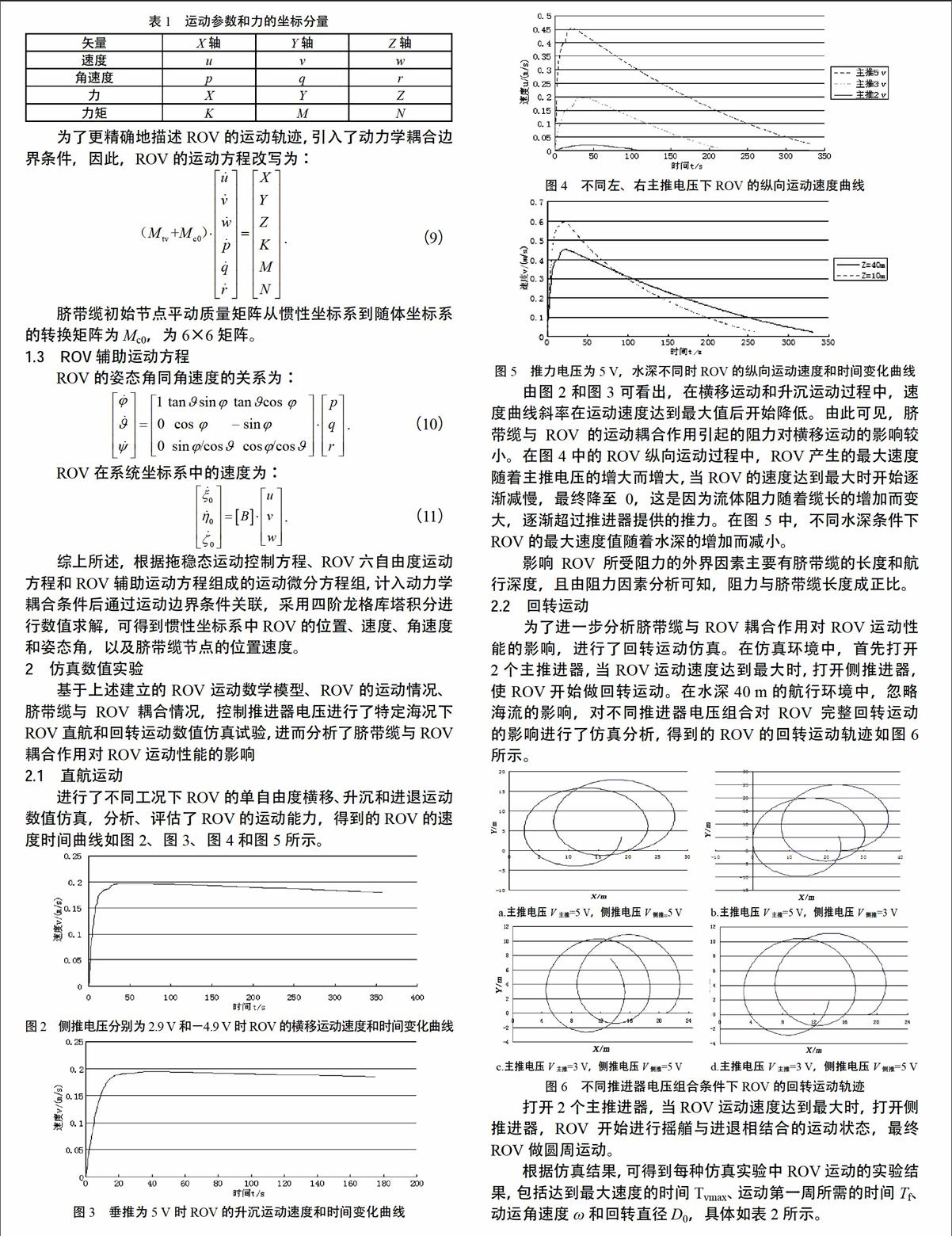
进行了不同工况下ROV的单自由度横移、升沉和进退运动数值仿真,分析、评估了ROV的运动能力,得到的ROV的速度时间曲线如图2、图3、图4和图5所示。
图2 侧推电压分别为2.9 V和-4.9 V时ROV的横移运动速度和时间变化曲线
图3 垂推为5 V时ROV的升沉运动速度和时间变化曲线
图4 不同左、右主推电压下ROV的纵向运动速度曲线
图5 推力电压为5 V,水深不同时ROV的纵向运动速度和时间变化曲线
由图2和图3可看出,在横移运动和升沉运动过程中,速度曲线斜率在运动速度达到最大值后开始降低。由此可见,脐带缆与ROV的运动耦合作用引起的阻力对横移运动的影响较小。在图4中的ROV纵向运动过程中,ROV产生的最大速度随着主推电压的增大而增大,当ROV的速度达到最大时开始逐渐减慢,最终降至0,这是因为流体阻力随着缆长的增加而变大,逐渐超过推进器提供的推力。在图5中,不同水深条件下ROV的最大速度值随着水深的增加而减小。
影响ROV所受阻力的外界因素主要有脐带缆的长度和航行深度,且由阻力因素分析可知,阻力与脐带缆长度成正比。
2.2 回转运动
为了进一步分析脐带缆与ROV耦合作用对ROV运动性能的影响,进行了回转运动仿真。在仿真环境中,首先打开2个主推进器,当ROV运动速度达到最大时,打开侧推进器,使ROV开始做回转运动。在水深40 m的航行环境中,忽略海流的影响,对不同推进器电压组合对ROV完整回转运动的影响进行了仿真分析,得到的ROV的回转运动轨迹如图6所示。
a.主推电压V主推=5 V,侧推电压V侧推=5 V b.主推电压V主推=5 V,侧推电压V侧推=3 V
c.主推电压V主推=3 V,侧推电压V侧推=5 V d.主推电压V主推=3 V,侧推电压V侧推=5 V
图6 不同推进器电压组合条件下ROV的回转运动轨迹
打开2个主推进器,当ROV运动速度达到最大时,打开侧推进器,ROV开始进行摇艏与进退相结合的运动状态,最终ROV做圆周运动。
根据仿真结果,可得到每种仿真实验中ROV运动的实验结果,包括达到最大速度的时间Tvmax、运动第一周所需的时间Tf、动运角速度ω和回转直径D0,具体如表2所示。
由图6和表2可见,当主推工作电压相同时,不同侧推工作电压对回转速度的影响较小;侧推工作电压相同时,不同主推工作电压产生的回转角速度和回转周期相差很大,回转直径与主推工作电压成正比,与侧推工作电压成反比。
基于上述仿真结果,可通过控制ROV的纵向速度影响ROV的回转运动。
3 ROV水下作业培训的视景仿真
视景仿真能增强训练人员的投入感,提高作业培训的真实性,因此,利用了实时仿真软件VegaPrime进行ROV水下作业培训的视景仿真驱动。
3.1 视景仿真框架
构建了ROV的各种作业环境和目标模型,并进行了实时视景软件驱动场景生成、视点变换和运动效果渲染,动态地模拟了ROV的作业环境。其二次开发工作图如图7所示。
图7 基于Multigen Creator和Vega的视景仿真开发流程图
3.2 碰撞检测
碰撞检测是虚拟场景模型驱动中的重要内容,精确的碰撞检测能提高虚拟场景的真实性和增强虚拟操作环境的真实感。碰撞检测结果不仅能影响场景出现穿透、重叠等穿帮视觉效果,还会反馈至运动模型,作为运动模型输入影响的运动趋势,进而对整个视景系统的逼真性起着至关重要的作用。
基于VegaPrime软件的Bump方法,采用x,y,z轴正负方向6条定长检测线,形成了一个空间检测体,如图8所示。根据预先定义的场景物体材质属性代码,灵活、高效地检测了各类属性场景模型。
图8 ROV碰撞检测示意图
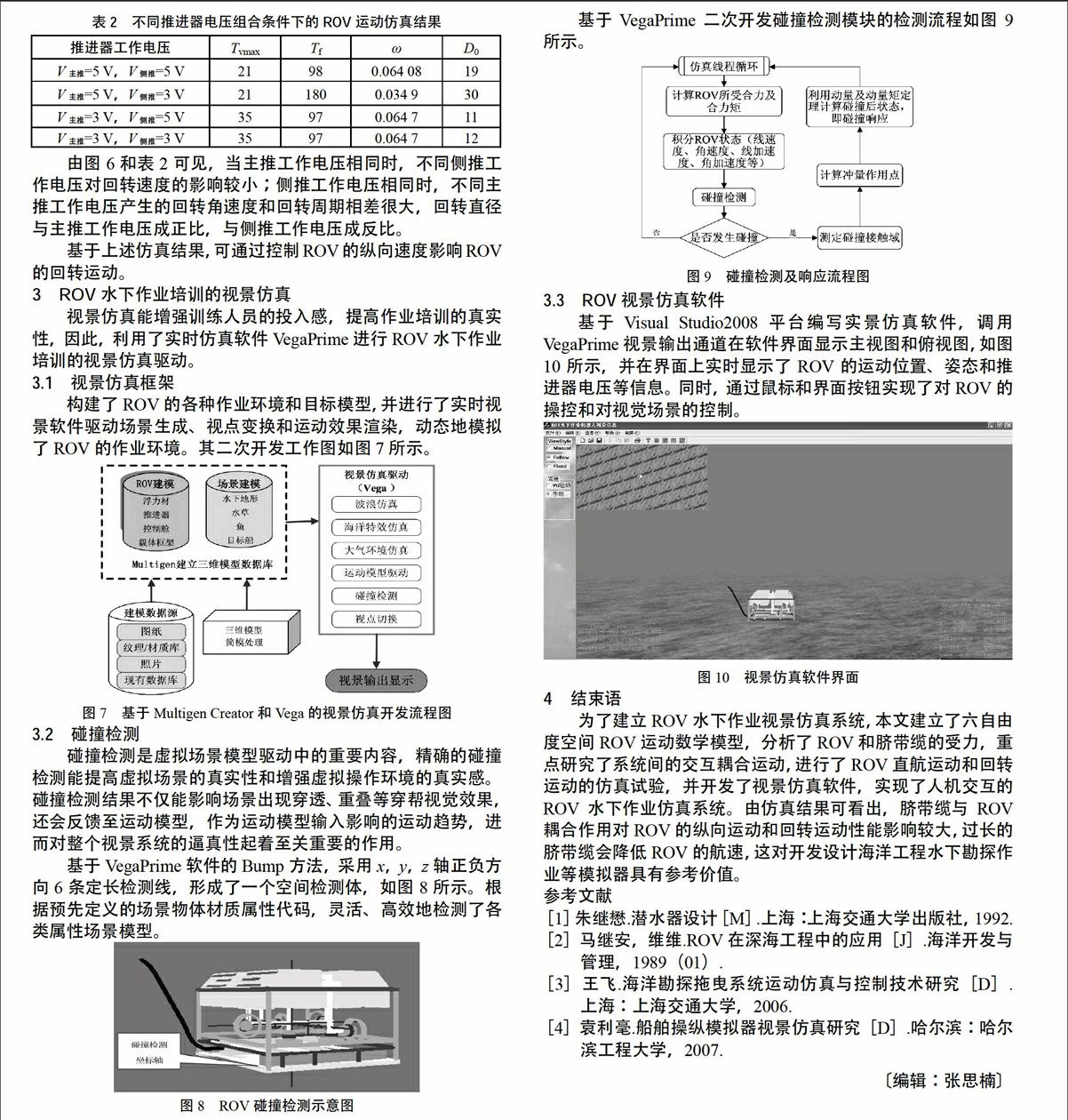
基于VegaPrime二次开发碰撞检测模块的检测流程如图9所示。
图9 碰撞检测及响应流程图
3.3 ROV视景仿真软件
基于Visual Studio2008平台编写实景仿真软件,调用VegaPrime视景输出通道在软件界面显示主视图和俯视图,如图10所示,并在界面上实时显示了ROV的运动位置、姿态和推进器电压等信息。同时,通过鼠标和界面按钮实现了对ROV的操控和对视觉场景的控制。
图10 视景仿真软件界面
4 结束语
为了建立ROV水下作业视景仿真系统,本文建立了六自由度空间ROV运动数学模型,分析了ROV和脐带缆的受力,重点研究了系统间的交互耦合运动,进行了ROV直航运动和回转运动的仿真试验,并开发了视景仿真软件,实现了人机交互的ROV水下作业仿真系统。由仿真结果可看出,脐带缆与ROV耦合作用对ROV的纵向运动和回转运动性能影响较大,过长的脐带缆会降低ROV的航速,这对开发设计海洋工程水下勘探作业等模拟器具有参考价值。
参考文献
[1]朱继懋.潜水器设计[M].上海:上海交通大学出版社,1992.
[2]马继安,维维.ROV在深海工程中的应用[J].海洋开发与管理,1989(01).
[3]王飞.海洋勘探拖曳系统运动仿真与控制技术研究[D].上海:上海交通大学,2006.
[4]袁利毫.船舶操纵模拟器视景仿真研究[D].哈尔滨:哈尔滨工程大学,2007.
〔编辑:张思楠〕
猜你喜欢
海洋开发与管理(2019年10期)2019-09-10
企业文化·中旬刊(2017年3期)2017-05-04
科学与财富(2017年1期)2017-03-17
中国管理信息化(2016年23期)2017-02-04
商场现代化(2016年23期)2016-11-17
企业技术开发·中旬刊(2016年10期)2016-11-12
中国市场(2016年36期)2016-10-19
科技与创新(2016年9期)2016-05-28
中国水运(2014年6期)2014-08-11