
一种基于自适应高提升滤波的遥感影像的阴影处理方法*
2015-09-09 09:45滕秀花胡文瑜林志强
哈尔滨师范大学自然科学学报 2015年4期
滕秀花,胡文瑜,林志强
(福建工程学院)
0 引言
随着遥感技术的发展,高空间遥感影像的分辨率越来越高,影像中大目标,如森林、海洋等大目标的细节信息越来越丰富,同时道路,车辆[1-2]、树等小目标识别也越来越热门.但是,由于高楼等高大物体的遮挡引起的阴影区域,掩盖了区域内小目标物体的细节信息,一定程度上影响了目标的识别、分割的精确性.因此如何正确地提取阴影区域,并有效地减少或去除阴影的影响,这在遥感影像的预处理中是十分重要的问题.该文首先分析了遥感影像阴影的颜色特性和光谱特征,利用光谱中的亮度阈值进行阴影检测,然后利用形态学基本操作,对阈值处理后的图像进行噪声滤除;并利用高提升滤波技术,对检测出的阴影区域进行补偿处理;最后实验证明,该文提出高的提升滤波补偿方法与分段线性化补偿方法[3]比较,该文方法在保持阴影区域内物体形状信息方面,效果更好;经该文方法补偿预处理后,遥感影像超块分割[4-5]边缘准确性明显改善.
1 高分辨率遥感影像阴影处理的研究现状
目前,关于阴影的研究成果主要体现在阴影检测[6]和阴影补偿两个方面.在阴影检测方面的研究成果主要分为两种方法:一种是基于模型的方法;另一种是基于属性的方法.基于模型的方法需要先验的场景信息,如太阳的方位、摄像头的位置、日期、时间等众多条件参数信息,利用这些条件参数可以比较精确计算出阴影的位置,但是实际操作很困难;基于属性的方法充分利用阴影中的颜色特性,比如亮度、光谱特性等信息相对于非阴影区域的差异性,操作比较容易.
对于阴影区域的补偿方法主要有三种[7-8]:伽马校正,分段线性调整以及直方图匹配.伽马校正方法主要考虑阴影中像素的亮度信息受到破坏,因此在阴影区域与非阴影区域之间建立映射关系,使得阴影区和光照区的亮度分布一致;分段线性调整根据不同亮度的各区域进行亮度的线性调整,使得图像整体变亮;直方图匹配的方法是将检测出来的阴影区域的直方图和非阴影区域的直方图匹配,使得两种区域的亮度整体分布一致.这三种方法通过不同的途径仅仅调整了阴影区域的亮度分布.该文采用的方法是对阴影区域进行高提升滤波处理,不仅能够整体上提高图像亮度,而且将阴影区域内被增强了的边缘细节信息加入到被调亮的影像中,实验表明,补偿后的形状信息更加突出.
2 高分辨遥感影像阴影区域的检测
2.1 基于亮度阈值的阴影检测
一般来说,由于阴影区域光线被部分遮挡,不能接受太阳的辐射,其接受到的辐射强度主要取决于天空光的辐射强度,必然导致阴影区的低辐射强度.因此阴影区域较非阴影区域具有较低的亮度值[9-10].该文的阴影区与非阴影区初步分割的亮度阈值T是自适应的,其定义如下:

其中max,min分别选取的是测试影像的最大亮度值与最小亮度值,meant亮度均值.由阴影特征可知,非阴影区的亮度值比阴影区域的亮度值高,因此基于亮度的阴影检测公式为:

式中F(x,y)为被检测图像像素点的灰度值;1为阴影点,0为非阴影点;因此本算法的关键是阈值T的设定,该文设定的阈值能检测出所有的阴影.

图1 基于阈值T的阴影检测
2.2 阴影过滤
根据阈值T进行阴影检测,黑色表示阴影,白色表示光照区.从图1中可以看到阈值T能够检测出所有的阴影区域,但是仍然存在2个方面的问题:1.由于图像中的噪声数据、或者区域内细小的高亮度小物体,引起了阴影区域细小的不连续性;2.光照区内暗色物体引起的错误阴影.为了解决如上所述问题,图像处理的形态学操作[11]能够处理这些噪声数据.
形态学中有两个重要的操作:开操作与闭操作.其具体讨论可见文献[11].开操作与闭操作的形态学方面的具体定义如下:
开操作:T=f◦b
闭操作:T=f·b
f表示原图,T表示开操作或者闭操作后的属性图像,b是结构元素,实验选取结构元素是5×5的矩形.该文针对阴影检测结果图像进行开操作,可以滤出阴影区域的白色噪声;闭操作可以滤出光照区的暗色噪声.如图2是及基于图1中阴影检测的结果进行噪声过滤.

图2 基于形态学操作过滤
3 基于自适应高提升滤波的阴影区域补偿
针对遥感图像阴影区域的低频化特性,以及阴影的光谱特性进行分析,该文提出了基于类比的自适应高提升滤波处理.锐化处理的主要目的是突出了图像中的细节或者增强被模糊的细节,从而获取特殊图像中固有的信息.遥感图像的阴影区域主要是低频信息,经过锐化处理后提取出图像中隐含的高频信息.该文选择的拉普拉斯是一种二阶微分算子,它强调图像灰度的突变及降低灰度慢变化的区域,因此可以提取高频信息.
反锐化处理是在图像中各像素进行如下变换:

其中fs(x,y)表示经过反锐化掩蔽得到锐化图像,是f(x,y)的模糊形式.
高提升滤波是反锐化的进一步处理,其图像fhb定义如下:

A是大于等于1的系数,结合反锐化处理公式,高提升锐化也可以等价如下定义:

参照非阴影区域光照情况,自适应地调整高提升锐化系数,该系数为:

其中Mref参照图像光照区域的平均亮度值,m阴影区域的平均亮度值.没有使用固定的系数,而是根据图像本身光照情况,自动调整高提升A的系数,使得遥感图像的阴影区域不但能够提高亮度,而且增加阴影区域内小目标物体的边缘突变信息,如图3所示,其结果保证了能够更好地保持区域内的形状信息,更加有效的辅助图像分割、分类.

图3阴影区域补偿
4 实验结果与分析
4.1 阴影检测与补偿
采用亮度阈值的方法对遥感图像的阴影进行初步检测,同时利用形态学操作进行修正,基于高提升滤波方法对阴影区域进行补偿处理.在实验中,针对高提升滤波和分段线性化两种阴影区域的补偿方法进行了对比,如图4所示.
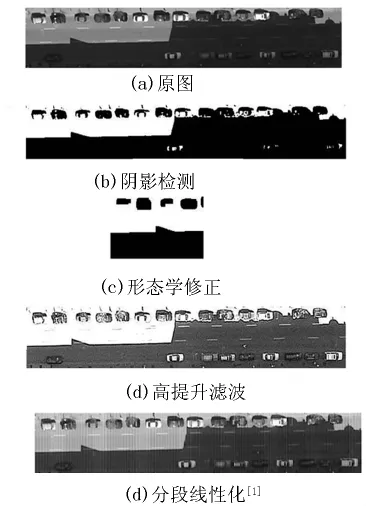
图4 阴影补偿比较实验结果
该实验影像片断的空间分辨率是0.15 m,从实验测试结果来看,由于城市道路两旁有大量的高建筑物,遮挡住了直射太阳光而在路面形成了大量的阴影,给阴影区域中的地物信息如(道路标志标线、车辆等)的识别造成了困难,使得后续研究的车辆识别的精度受到影响.因此为了使阴影区域中车辆信息显示更加清楚,需要对影像中的阴影区域进行检测和处理.
基于该文的亮度阈值方法对此遥感图像进行检测,与原图像相比,阴影的绝大部分区域都检测出来,只有影音区域内亮色小目标影响了阴影区域的连通性,以及光照区域的暗色小目标形成了假阴影,因此该文通过形态学操作以及面积约束,滤出了大部分的噪声数据.该文实验的两种补偿方法使得阴影区域的亮度都得到了提升,阴影区域内信息都得到了增强,但是效果不同:由于高提升滤波是在提升亮度的基础上增加边缘突变信息,因此保持阴影处的物体形状保持的更好如图5所示.而且阴影内如车道等更明显.

图5 局部放大比较
4.2 超块分割[5]
经过阴影区域补偿增强后,能够进一步改善超块分割的精度,如图6所示.

图6 超块分割比较
阴影区内的白色车辆没有经过补偿处理,车辆被过度分割2个超块,经过亮度分段线性化后,过度分割效果情况没有了,但是边缘贴附性较弱,但是经过高提升锐化补偿后,不仅避免了过度分割情况,而且分割的边缘贴附性良好.经过该文方法的预处理后,其他车辆的分割情况和线性化方法相比,也得到了不同程度的改善.
5 结束语
阴影检测为阴影补偿界定了区域;阴影补偿增强了区域内目标的形状、纹理信息,对于阴影区域内车辆等小目标识别,遥感图像的对象分割等研究有着至关重要的作用,是后续研究的基础.
[1]Hsu-Yung Chengdu,Chih-chia Weng,Yi-Ying Chen.Vehicle Detection in Aerial Surveillance Using Dynamic Bayesian Networks[J].IEEE Transactions on Image Processing,2012,21.
[2]Zheng Zezhong,Zhou Guoqing,Wang Yong.A Novel Vehicle Detection Method With High Resolution Highway Aerial Image[J].IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing,2013,6(4):2152–2159.
[3]郭杜杜,梁艳平,王兵.基于亮度特性的高空间分辨率遥感影像阴影处理研究[J].交通信息与安全,2012,30(168):16-19.
[4]Achanta R,Shaji A,Smith K,et al.SLIC superpixels Compared to state-of- the art superpxel methods[J].IEEE Transactions on Pattern Analysis and Machien Intelligence,2012,34(11):2274–2281.
[5]Michael Van den Bergh,Xavier Boix,Gemma Roig,et al.SEEDS:Superpixel Extracted via Energy- Driven Sampling.http://www.vision.ee.ethz.ch/~ vamichae/seeds_long.pdf.
[6]Ma H,Qin Q,Shen X.Shadow segmentation and compensation in high resolution satellite images.In Proc IEEE IGARSS,2008,2(8):1036–1039.
[7]Huihui Song,Bo Huang,Associate Member,et al.Shadow Detection and Reconstruction in High-Resolution Satellite Images via Morphological Filtering and Example-Based Learning.IEEE Transactions on Geoscience and Remote Sensing,2014,52(5):2545–2554.
[8]Lorenzi L,Melgani F,Mercier G.A complete processing chain for shadow detection and reconstruction in VHR images.IEEE Trans.Geosci.Remote Sens,2012,50(9):3440–3452.
[9]柳稼航,杨建峰,方涛.彩色遥感影像阴影颜色特性分析[J]光子学报,2009,38(2):441–447.
[10]Tsai V.A comparative study on shadow compensation of color aerial images in invariant color models[J].IEEE Trans Geosci Remote Sens,2006,44(6):1661–1671.
[11]Maragos P.The Image and Video Processing Handbook.2nd ed New York,NY,USA:Elsevier,2005.135–156.
猜你喜欢
文苑(2020年11期)2020-11-19
中国诗歌(2019年6期)2019-11-15
制造技术与机床(2019年9期)2019-09-10
摄影之友(影像视觉)(2019年3期)2019-03-30
西南交通大学学报(2018年6期)2018-12-18
河北遥感(2017年2期)2017-08-07
小天使·六年级语数英综合(2017年5期)2017-05-27
中学生数理化·八年级物理人教版(2017年11期)2017-04-18
衡阳师范学院学报(2016年3期)2016-07-10
现代工业经济和信息化(2016年19期)2016-05-17
