基于DELMIA的雷达系统维修性虚拟验证技术*
2015-09-08 10:21:36梁震涛程亚龙宋南海
电子机械工程 2015年5期
梁震涛,程亚龙,宋南海
(南京电子技术研究所, 江苏 南京 210039)
基于DELMIA的雷达系统维修性虚拟验证技术*
梁震涛,程亚龙,宋南海
(南京电子技术研究所, 江苏 南京 210039)
文中针对现代雷达系统的设计需求,研究了基于DELMIA软件的维修性虚拟验证方法。首先制定了维修性虚拟验证的流程;然后对数据准备、仿真过程及评价方法进行了细化,论证了每一步工作的具体内容与要求,形成了雷达系统虚拟维修性仿真的完整解决方案;最后通过具体示例对整个仿真进行了演示,验证了方法的可行性。
雷达系统;维修性;虚拟验证
引 言
雷达是现代战争的重要武器装备。随着雷达系统的复杂化、综合化发展,其维修性问题更为突出,已经与其传统性能处于同等重要的地位。维修性是装备的基本属性之一,是与装备的维修密切相关的设计特性,它反映装备是否具备维修方便、快捷、经济的能力。具备良好维修性的关键在于产品设计,其核心是进行维修性的设计分析与验证[1]。
进入21世纪后,计算机技术、信息技术、管理技术得到快速发展和广泛应用,产品的工程设计与制作呈现并行化、集成化、网络化、虚拟化、智能化的发展趋势,虚拟现实技术也越来越多地应用到产品的设计中来。虚拟维修是虚拟现实技术与维修性工程相结合的成果,是以计算机技术与虚拟现实技术为依托,在由计算机产生的、包含了产品数字样机和维修人员三维人体模型的虚拟场景中,通过驱动人体模型来完成整个维修过程仿真的综合性应用技术[2]。美国通用汽车公司利用美国伊利诺斯大学开发的虚拟现实系统并结合虚拟人,来评价汽车的人机工程学性能;波音公司利用改进的Dassault / IBM计算机辅助三维交互系统(CATIA)将飞机的结构、系统、布线及管道铺设的数字式图像组合在一起,为完成飞机的数字化预装配提供了一种有效的维修性设计工具;英国的Salford大学的高级机器人研究公司为Roll-Royce公司的飞机发动机建立模型,以评估发动机维修过程中出现的问题[3-5]。
在目前的虚拟维修工具中,法国达索公司开发的DELMIA软件应用最为广泛,具备干涉仿真、顺序仿真、人机工程仿真和可视化培训等许多功能。本文针对某复杂雷达系统,以DELMIA软件为手段,开展虚拟维修验证研究,从流程、仿真和评价方面对雷达的关键维修部位进行定量/定性评价。
1 维修性虚拟验证流程
维修性虚拟验证流程如图1所示,主要包含数据准备、维修仿真、维修性评价3个部分。
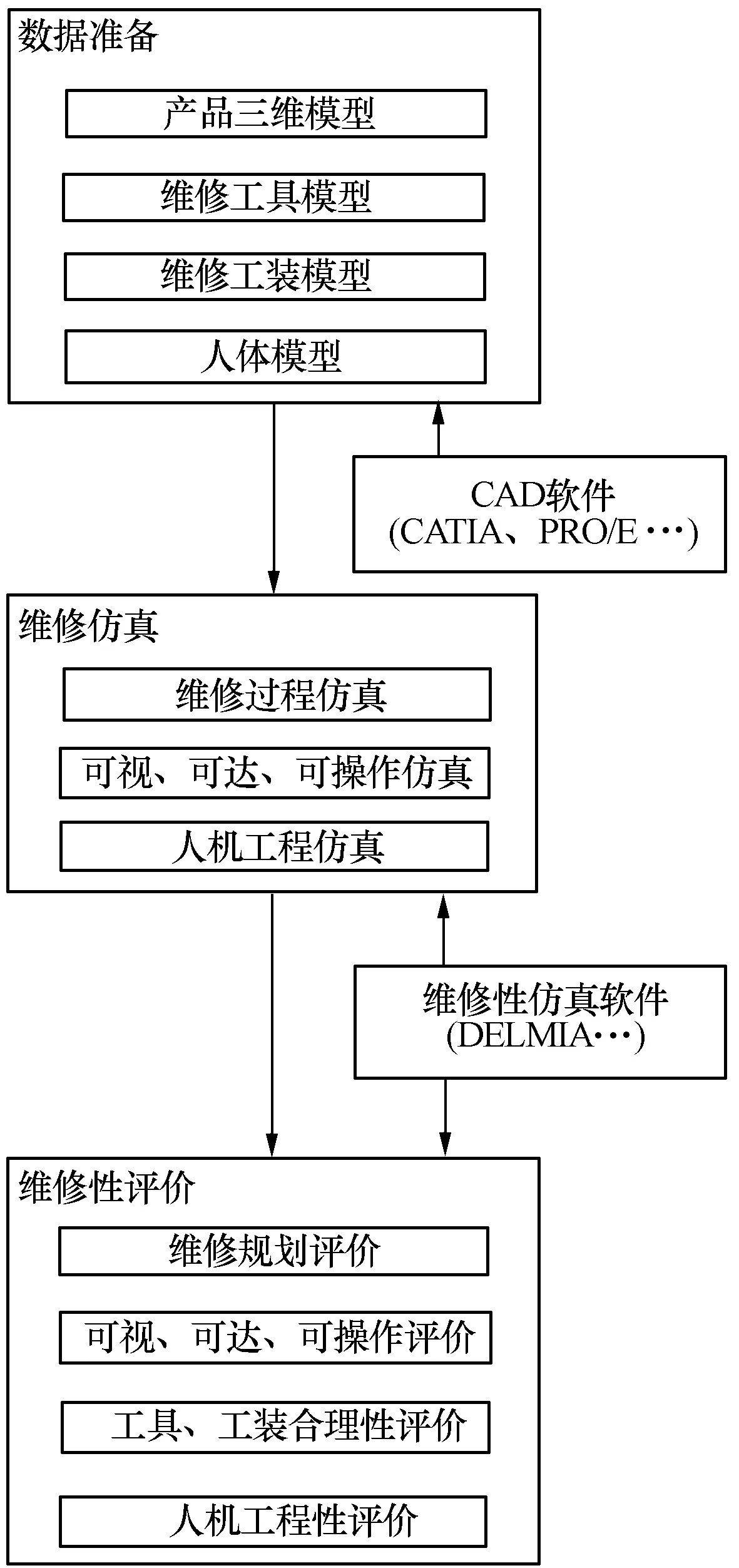
图1 维修性虚拟验证流程
2 数据准备
数据准备包括仿真产品的三维模型、维修使用的工具、工装设备和人体模型等。
产品三维模型和特殊工具、工装由相关CAD设计软件生成(包括Pro/E、UG、Solidworks等),通过直接转换插件或中间格式变为DELMIA文件格式(.CATPart/.CATProduct格式)。常用的中间格式包括IGES、STEP、STL等,由于STEP格式具有良好的数据稳定性和可扩展性,同时采用STEP格式进行中间转换可减少模型数据规模,提升仿真效率,因此建议优先使用这种格式。
对于通用工具、工装和人体模型,可直接调用DELMIA软件的模型库。进行人体选择时应根据维修人员的不同选择合适的比例。
3 维修性仿真
3.1 维修过程仿真
维修过程仿真主要验证维修工序的可行性与合理性,同时验证场景、工装、工具与维修活动的匹配性。利用DELMIA进行维修过程仿真时,必须首先规划维修流程,并建立Process Library(如图2所示),然后将Process Library插入模拟环境并构建Process结构,最后导入人体模型、维修工具、设备以及工装资源等,构建虚拟维修场景并建立人体模型与Process之间的链接,开始细化的仿真工作。

图2 Process Library示例
在维修过程仿真中,可优化确定维修工序,设备拆装路径,场地、工装、工具的需求以及人与环境设备的配合,确保维修过程可实施。
3.2 可视、可达、可操作仿真
可视性强调视觉上的通达性,即从一个或多个位置所能看到的范围或可见程度。可视性确保能够目视检查维护设备并指导维护操作。可达性是在维修过程中,能够接近某一设备的相对容易性,不良的可达性使得维修困难,浪费时间,往往会降低维修的可靠性。可操作性是对设备、工具、人员和维修环境的综合考虑,是对维修实现的综合保障。DELMIA软件可通过视角设定的仿真实现可视性检查。如图3所示,通过打开人体视角窗口,在人体进入天线座时即可实时进行可视性仿真。如图4所示,设计人体各部位的动作,通过干涉检查可实现人与设备之间的可达性检查。通过虚拟环境的设定实现可操作性的检查,如图5所示,通过手拧扳手的动作,即可发现安装紧固件的可操作性。
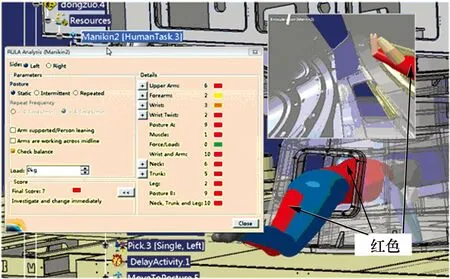
图3 可视性检查

图4 可达性检查
3.3 人机工程仿真
人机工程仿真主要开展特定比例人体在机器环境下人体机能特征参数验证,包括视觉、触觉、能量消耗、疲劳机理以及人对各种劳动负荷的适应能力等。举放分析通过记录人体姿态,根据举放频率、持续时间、耦合状态、物体重量等分析给出可承受的物体合理重量和极限重量;推拉分析根据推拉频率、推拉距离、人体比例分析给出初始推拉力和持续推拉力的大小;搬运分析通过搬运频率、搬运距离和人体比例计算出可承受的最大物体重量;生物力学分析可给出单个动作的压力和关节剪力极限,肘部、肩部和腰部的弯曲、旋转、拐扭等信息,各部位的反应力与力矩,各部位的位置、角度、重心和长度等信息。
4 维修性评价
维修性设计与仿真包含众多影响因素,例如过程的设计、环境的影响、工具工装的匹配性以及操作人员的能力等。因此在对产品的维修性进行评价时应从维修规划、可视可达可操作、工装工具及人机工程等多方面进行评判。
维修规划主要评判维修工序、操作方式的合理性,单个设备的维修应尽可能减少对其它设备的影响并使用最少的工具和人力,同时应在可操作的前提下,减少对特殊工装的使用;可视可达可操作主要评判设备的拆装能否保证操作对象视力可及、人体/工具可及、动作可实现;工具工装的评判标准主要是能够支撑整个维修过程的实现,并尽量简化;人机工程的评判标准主要是让维修操作者在一个相对舒适和体力可支撑的状态下完成维修工作。这些评判工作一般可以定性和定量相结合的方式进行。例如人机工程中的疲劳分析可采用RULA分析,它通过综合分析人体的运动部位数量、工作的肌肉、受力、工作姿势和工作时间等多个因素形成1~7之间的分值,这些分值分为4段,其含义和对应颜色为
1)1~2:绿色,表明若该姿势不是长时间持续或重复的,可以接受;
2)3~4:黄色,表明该动作不能长时间持续,需要变动;
3)5~6:橙色,表明该动作需要尽早改变;
4)7:红色,表明该动作需要立即改变。
在图3所示的模型中,维修人员的大腿、背部、左手均为红色,表明这些部位较为疲劳,需要立即改变。
5 示例
本文结合上述方法,针对某一雷达系统开展维修性虚拟验证。所用数据均为实际产品的Pro/E全三维设计数据,排除对仿真无影响的设备并适当简化后通过STEP格式导入DELMIA。根据维修的实际场景,将人体、工具/工装等导入环境,然后根据预先设计的维修工序进行维修性虚拟验证。图6所示为典型设备的维修过程,展现了维修的过程、人体的姿态及舒适度、操作人员的视角等具体内容。仿真结果表明,设备维修可以实现但人员舒适度较差,可通过扩大维修通道,增加操作人员维修舒适度。图7主要展现了设备、环境与操作人员的配合,验证了维修过程规划的可行性。

图6 典型设备维修1

图7 典型设备维修2
6 结束语
良好的维修性是雷达设备有效运行的重要保障。本文针对现代雷达设备的结构组成和关键设备的特点,研究了基于DELMIA的雷达系统维修性虚拟验证技术。首先制定了虚拟维修性验证仿真的基本流程;其次分析了仿真验证的数据准备过程,包括三维模型、工具工装和人体资源等;再从仿真过程、仿真特性、人机工程等方面详细分析了虚拟维修的仿真过程;然后从维修规划的合理性,可视、可达、可操作性,工装工具的可实现性,人体舒适性等方面提出了维修性的评价方法;最后以某雷达系统为例进行了虚拟维修性的仿真设计,验证了维修性虚拟验证方法的有效性。在该方法的基础上,通过大量的实例分析建立常用的维修动作库、细化人体疲劳分析的评价指标等方式,提高雷达设备维修性仿真分析的效率,将是下一步研究的重点。
[1] 吕川. 维修性设计分析与验证[M]. 北京: 国防工业出版社, 2012.
[2] 张庆雅. 虚拟现实技术及其应用综述[J]. 现代电子技术, 1998(8): 11-13.
[3] ABSHIRE K J, BARRON M K. Virtual maintenance: real-world applications within virtual environment[C]// Proceedings of the Annual Reliability and Maintainability Symposium, Anaheim, California, USA: 1998.
[4] TAVERNA, MICHAEL A. Case study in virtual reality[J]. Aviation Week and Space Technology (New York), 2004, 160(19): 52-54.
[5] 戴永峰. 民用飞机维修性虚拟分析与验证方法研究[D]. 南京: 南京航空航天大学, 2005.
梁震涛(1979-),男,高级工程师,主要从事机载雷达结构总体设计工作。
程亚龙(1986-),男,工程师,主要从事大型相控阵雷达结构总体设计工作。
宋南海(1983-),男,工程师,主要从事大型相控阵雷达结构总体设计工作。
Virtual Verification of Maintainability for Radar System Based on DELMIA
LIANG Zhen-tao,CHENG Ya-long,SONG Nan-hai
(NanjingResearchInstituteofElectronicsTechnology,Nanjing210039,China)
A virtual verification method of maintainability for the radar system based on DELMIA is researched in this paper for the design requirements of the modern radar. The process of virtual verification of main-tainability is established at first. After that, the data preparation, simulation process and evaluation method areelaborated. Then the specific work content and requirements of every step are demonstrated and a complete solution to virtual simulation of maintainability for the radar system is formed. Finally, an example is taken to demonstrate the entire simulation process and the effectiveness of the method is verified.
radar system; maintainability; virtual verification
2015-07-29
TP391.97
A
1008-5300(2015)05-0058-04
猜你喜欢
故事作文·低年级(2023年2期)2023-05-30 10:48:04
汽车工程师(2021年11期)2021-12-21 06:23:12
防爆电机(2020年6期)2020-12-14 07:17:06
模具制造(2019年4期)2019-06-24 03:36:46
民用飞机设计与研究(2019年4期)2019-05-21 07:21:34
汽车文摘(2015年11期)2015-12-14 19:10:11
第二课堂(课外活动版)(2015年6期)2015-10-21 19:26:21
Coco薇(2015年10期)2015-10-19 12:12:32
销售与市场·管理版(2015年5期)2015-05-05 12:39:51
航空标准化与质量(2014年3期)2014-03-04 08:04:38