求根MUSIC初值设置和更新算法
2015-09-03 01:53:54闫锋刚
哈尔滨工业大学学报 2015年3期
闫锋刚,张 薇,金 铭
(哈尔滨工业大学(威海)信息与电气工程学院,264209山东威海)
信号波达方向(direction-of-arrival,DOA)估计[1-2]是雷达、声呐、无线通信和无源定位等应用中经常遇到的重要研究课题.以多重信号分类(multiple signal classification,MUSIC)[3]和旋转不变子空间(estimate signal parameters via rotational invariance technique,ESPRIT)[4]为代表的子空间类算法的提出,实现了传统空间谱估计向超分辨测角的飞跃,但 MUSIC算法庞大的计算量和ESPRIT算法较低的估计精度阻碍了超分辨算法的工程化进度[5].
在均匀线阵(uniform linear array,ULA)下,阵列导向矢量具有特殊的范德蒙结构,使得MUSIC算法繁杂的谱峰搜索简化为多项式求根问题,由此促成了求根 MUSIC(root-MUSIC)算法[5]的诞生.虽然 root-MUSIC仅是 MUSIC在ULA下的特例,然而理论分析和实验结果证明:root-MUSIC的估计精度比MUSIC的估计精度更高[6-7],因而其相比于MUSIC实现了低复杂度和高精度的双赢.文献[8]通过理论分析论述了root-MUSIC估计性能与环境、阵元参数的内在联系;文献[9]借助中心对称阵列结构实现了root-MUSIC的实值化,在降低计算量的同时提高了算法的估计精度;文献[10-11]借助流型分离(manifold separation technique,MST)技术,将任意阵列的导向矢量近似地分裂成两个独立部分的乘积,利用包含信号角度信息且具有范德蒙结构的部分、以多项式求根实现信号 DOA估计.文献[12]利用任意阵列结构下的MUSIC空间谱是关于信号DOA周期函数的事实,提出了傅里叶域求根MUSIC(fourier-domain,FD-MUSIC)算法,将root-MUSIC由ULA推广到了任意阵列结构.文献[13]基于傅里叶级数的劳伦结构,对 FD-root-MUSIC进一步进行了改进,有效降低了多项式的求根阶数,降低了算法的复杂度.
上述算法丰富了root-MUSIC的理论内涵,但它们在实际工程应用中一般均需借助迭代算法对多项式求根.选择合适的初值并基于一定的原则对其更新和控制以使迭代快速、准确地收敛具有重要研究意义.
本文在分析root-MUSIC多项式根分布特点的基础上,提出了一种迭代初值到单位圆平均距离最短(least average distance to unit circle,LADTUC)的准则,进而基于该准则发展了一种适用于root-MUSIC的初值设置和更新算法.理论分析和试验结果表明,该算法能有效避免迭代过程中的错误解并加速迭代收敛速度,从而为root-MUSIC的实际工程化提供理论参考.
1 数据模型及root-MUSIC算法原理
1.1 数据模型
考察xoy平面上由M个以半波长间隔放置的阵元组成的ULA,假设阵列各通道附加高斯白噪声且空间有L个辐射源,定义波达方向DOA为信号来向与阵列法线的夹角,则阵列一次快拍接收数据为[3]

式中:x(t)是M×1维接收数据向量;s(t)是L×1
维信号向量;n(t)是M×1维噪声向量.A(θ)是M×L维导向矢量矩阵且导向矢量a(θ)定义为

阵列接收数据协方差矩阵定义为

式中:RS为信号协方差矩阵,σ2n为噪声功率.对R进行特征值分解,可得

式中:ρi,i=1,2,…,L和ρj,j=L+1,…,M分别为R的L个大特征值及(M-L)个小特征值,ei和ej分别为是ρi和ρj对应的特征矢量.定义:

则S和G的列分别张成信号子空间和噪声子空间.
1.2 root-MUSIC算法原理
依据上述阵列和数据模型,root-MUSIC算法定义如下所示的多项式[5]:

其中p(z)定义为

对f(z)求根即可获得DOA.由于f(z)存在z*项,求根较为复杂.为便于计算,做如下修正:

此时,多项式f(z)的阶数为2(M-1),所以有(M-1)对根,每一对根是相互共轭的关系.这些根中的L个根z1,z2,…,zL正好分布在单位圆上,且

实际中,得到多项式f(z)中L个接近于单位圆的根后,可按下式求解信号DOA:

2 LADTUC准则及最佳初值设置
2.1 f(z)最小值设置
通常为得到DOA,只需根据式(8)令f(z)=0并求根即可,但当快拍数或信噪比较低时,在信号入射方向有

因此,为得到精确DOA,需估计fmin并对修正多项式f(z)-fmin=0进行求根.
由MUSIC零谱统计性能知,发射能量为Ei(i=1,2,…,L)的辐射源,在 MUSIC 空间零谱上产生的最小值为[14-15]

式中J为快拍数,辐射源能量Ei(i=1,2,…,L)在一般情况下是难以获得的,一种近似的求解方法是认为每个辐射源的辐射能量都相同,即

式中:E为观测信号总能量,ρj是协方差矩阵R特征值分解后对应的噪声空间特征值,其数值等于噪声的能量.由上述分析,可设置

实际中,当快拍数或信噪比较高时,fmin接近于0.此时,可直接选取近似值fmin≈0.
2.2 最佳迭代初值设置
对方程f(z)-fmin=0采用牛顿法求解[16],得

式中:f'(z)为f(z)的一阶导函数,z0为迭代初值,zn是经过第n次迭代后得到的解.
可选取一定容差ϑ,当z0与zn满足

时迭代结束,然后将zn带入式(11)即可求得DOA.
迭代初值z0的选取至关重要,其直接决定着迭代的收敛速度和正确性.由于代表信号DOA的根分布在单位圆上,故z0的选择应以到单位圆平均距离最短为准则,这便是本文提出的LADTUC准则,后续仿真实验证实了该准则的合理性.
由于DOA取值范围为[-π/2,π/2],只需考虑半单位圆即可.为了叙述便利,以下均用U代表上半单位圆弧.设R(cosθ,sinθ)为U上任意一点,其中,θ为R与圆心连线的倾角,显然,θ符合均匀分布特性,其概率密度函数为

设最佳迭代初值为Q1,则Q1到R(cosθ,sinθ)平均距离的平方L21为
依据LADTUC原则,令
易求得,最佳迭代初值为

2.3 迭代初值更新方法
LADTUC原则保证的是平均意义下的最佳,实际中的某次迭代解算可能因受到U内、外根的干扰而无法收敛到U上.为了解决该问题,定义数列Qn:

式中:点A为弧Un,n=1,2,…上任意一点,Un为将U进行k1倍等分后、顺时针方向的第k2+1份弧.易求得k1、k2与n满足如下关系:

式中符号「·⏋表示向上取整.
由式(21)可见:Qn,n=1,2,… 是 LADTUC意义下对Q1的扩展,其代表的是到弧Un平均距离最小的点列.设弧Un上、下端点和圆心连线的倾角为θ1和θ2,易求得

利用类似于式(18)、(19)的方法,可得Qn,n=1,2,… 的横、纵坐标值为

显然,当n→ ∞ 时,θ1→θ2→0,Qn→1.因此,Qn的所有元素均在U内.图1给出了Qn的前7个元素在U内的相对位置关系.基于Qn,可对迭代初值更新,以保证迭代最终收敛于U上.

图1 数列Q的前7个元素
假设U上分布正确根R1和R2,U内、外分别分布干扰根Ⅰ1、Ⅰ2和O1、O2,如图 2 所示.依据LADTUC原则,首先设置迭代初值z0为Q1,若迭代收敛于干扰根Ⅰ1,则更新z0为Ⅰ1相对于Q1反方向的Q2,以避免Ⅰ1的干扰;否则,更新z0为Q3.若更新后迭代仍收敛于干扰根Ⅰ2,则更新z0为Ⅰ2相对于Q3反方向的Q5,以避免Ⅰ2的干扰;同理,当迭代再次收敛于干扰根O1时,则更新z0为O1相对于Q5反方向的Q4,以避免O1的干扰,….如此反复更新z0,直至迭代收敛于正确根R1.
在LADTUC原则下,每次初值更新都是以平均最接近U的等分弧段而进行.为防止多次更新仍不收敛,可预设最大容忍迭代次数N,当迭代次数达到N/2时,下一步则应“逃逸”至相反的半弧进行.如图2所示,当设置z0为Q4仍不收敛时,下一步应更新z0为Q3,以在U的右半弧寻求正确根R2.

图2 LADTUC原则下迭代初值设置和更新
3 收敛性能分析
式(8)根的总数为

其中,代表辐射源DOA的根有L对,因此,干扰根的个数为

采用LATDUC原则进行迭代初值设置和更新时,当干扰根距离数列Q第k个元素Qk的距离小于Qk到Uk的平均距离时,则迭代会收敛到干扰根而不会收敛到单位圆上,此时收敛会失败.因而,第k次初值设置收敛失败的概率为

因此,经过k次初值更新,成功收敛概率为

由于0<qk<1,由式(28)可见:pLADTUC随k的增加急剧增大,因而本文算法每经一次初值更新后,成功收敛的概率都会大幅增加.
若采用随机法设置迭代初值,只进行1次初值设置迭代收敛成功(收敛到U上)的概率为

由于随机法的每次初值设置相互独立,故其经过k次初值设置成功收敛的概率恒为prand,这意味着随机设置和更新初值的收敛概率并不会随k的增加而增大.因而,LADTUC相比于随机设置、更新迭代初值法从统计平均上提高了成功收敛的概率.
4 仿真试验
试验采用ULA阵列,阵元间距为半个波长.设快拍数J=256,迭代停止容差ϑ=10-2,最大容忍迭代次数N=30.设辐射能量彼此相等,信源DOA通过随机生成[-π/2,π/2]上均匀分布的L个角度得到.Monte Carlo试验次数均为500次.
4.1 最佳迭代初值Q1合理性验证
本试验用于验证式(20)给出最佳迭代初值Q1(0,2/π)的合理性.试验设置阵元数M=10,迭代初值为z0=0+Δi,其中步长以间隔0.05从0.05增大到1.试验分为如下两个部分.
首先,选取L=3并以RSN为参变量,统计Δ的取值与采用牛顿法求解方程根的迭代次数及收敛概率的关系,结果如图3所示.试验中,当迭代总次数超过N=30时认为收敛失败.
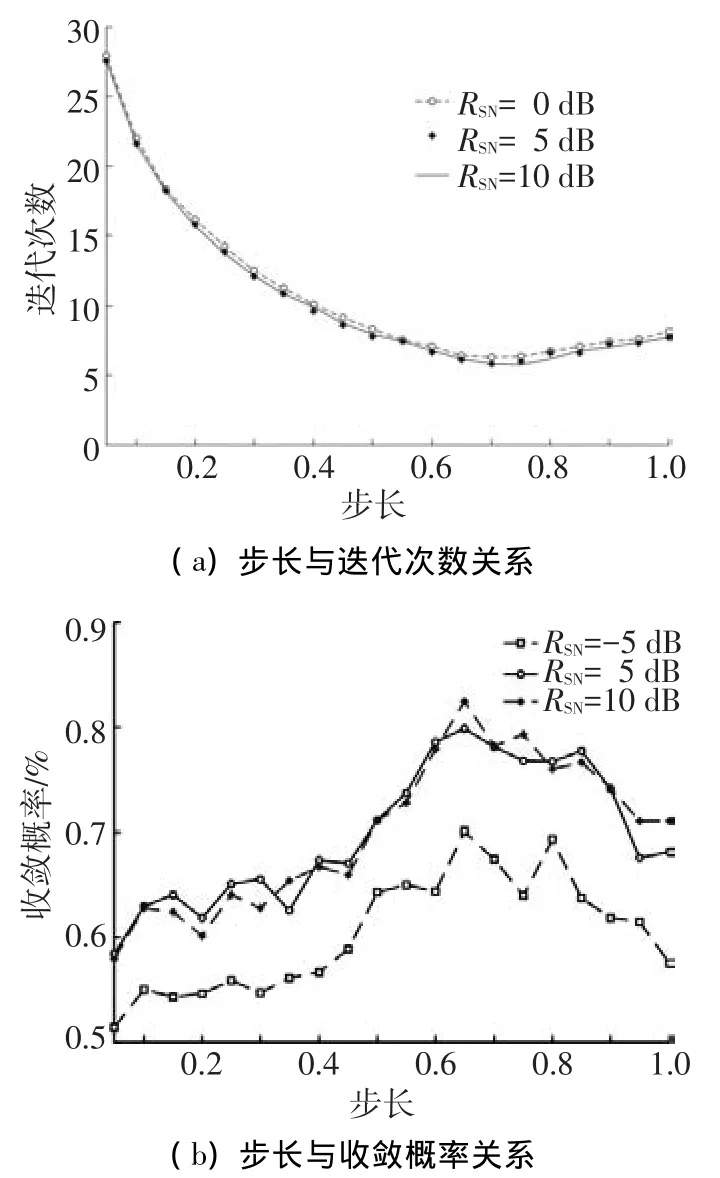
图3 信噪比参变时,步长与迭代次数及收敛概率关系
其次,选取RSN=5 dB并以信号数L为参变量,统计步长值与采用牛顿法求解方程根的迭代次数及收敛概率的关系,结果见图4.试验中,当迭代总次数超过N=30时则认为收敛失败.
由图3、4可见:相比于RSN,L对迭代次数和迭代的成功收敛概率影响更强,这是由于RSN仅影响方程(8)根的分布,而L除了影响方程根分布之外还决定着干扰根的多少.另外,由图3、4可观察到:当Δ=0.65≈2/π时,成功收敛概率最大,迭代次数也接近最小,这证明了初值Q1(0,2/π)的合理性.
4.2 LADTUC初值更新原则的合理性验证
本试验用于验证图2所示的基于LADTUC原则进行迭代初值更新方法的合理性.试验设置阵元数M=15,RSN=5 dB,然后分别按LADUC原则和随机法更新迭代初值,并按如下两方面进行平均结果统计.
首先,统计迭代初值更新次数与信号数L的关系,结果见图5.试验中,当迭代总次数超过N=30时则认为收敛失败.

图4 信号数参变时,步长与迭代次数及收敛概率关系
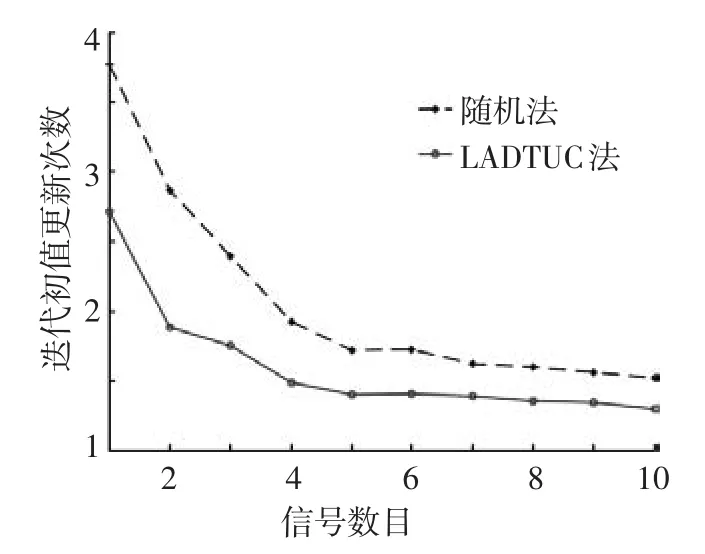
图5 迭代初值更新次数与信号数目关系
其次,设置初值更新的最大容忍次数为3,然后统计迭代成功收敛概率与信号数L的关系,结果见图6.试验中,当迭代总次数超过N=30或初值更新次数超过3次时,均认为收敛失败.
由图5可见:基于LADTUC原则进行迭代初值更新,最多只需要进行3次以下的更新即可成功收敛,其相比于随机更新法显著减少了更新次数.另一方面,当信号数L较小时,本文方法所需的更新次数比随机法的更新次数更少.这是因为L越小时方程(8)的干扰根较多,而LADTUC原则相比于随机法从平均意义上保证了迭代收敛概率更高,因此其所需的初值更新次数越少.
由图6可见,当L>2时,LADTUC原则下的迭代成功收敛概率均>95%;而随机法的成功收敛概率仅为85%左右,其相比于本文方法低10个百分点.与图5相似,从图6可见:本文方法相比于随机发在信号数L较少(即式(8)干扰根较多)时的优势更为明显,迭代收敛概率更高.上述实验结果说明了依据LADTUC准则对root-MUSIC算法进行初值设置和更新是合理性的.

图6 迭代成功收敛概率与信号数目关系
5 结语
本文在分析root-MUSIC算法根分布特点的基础上,提出了一种利用工程实现的root-MUSIC初值设置和更新算法.该算法充分利用了LADTUC原则对于迭代收敛的控制作用,保证了root-MUSIC算法迭代收敛的快速性和正确性,为root-MUSIC算法的实际工程化提供了一定的理论参考.
[1]JIN H.Joint space-time parameter estimation for multicarrier CDMA systems [J].IEEE Transactions on Vehicular Technology,2012,61(7):3306-3311.
[2]KHABBAZIBASMENJ A.Efficient transmit beamspace design for search-free based DOA estimation in MIMO radar[J].IEEE Transactions on Signal Processing,2014,62,(6):1490-1500.
[3]YAN F G,JIN M,LIU S,et al.Real-valued MUSIC for efficient direction estimation with arbitrary array geometries [J]. IEEE Transactions on Signal Processing,2014,62(6):1548-1560.
[4]ZHENG G M,CAO B X,YANG M L.Unitary ESPRIT algorithm for bistatic MIMO radar[J].Electronics Letters,2012,48(3):1122-1123.
[5]CHENG Q,HUANG L,So H C.Improved unitary root-MUSIC for DOA estimation based on pseudo-noise resampling[J].IEEE Signal Processing Letters,2014,21(2):140-144.
[6]STOCIA P,NEHORAI A.MUSIC,maximum likelihood,and Cramer-Rao bound:further results and comparisons[J].IEEE Transactions on Acoustics,Speech and Signal Processing,1990,38(12):2140-2150.
[7]CAO Y,ZHANG Z,DAI F,et al.Direction of arrival estimation for monostatic multiple-input multiple-output radar with arbitrary array structures [J].IET Radar,Sonar& Navigation,2012,6(7):679-686.
[8]LI F,LIU H,VACCARO R J.Performance analysis for DOA estimation algorithms:Unification,Simplification,and Observations[J].IEEE Transactions on Aerospace and Electronic Systems,1993,29(4):1170-1184.
[9]MARIUS P,ALEX B G,MARTIN H.Unitary root-MUSIC with a real-valued eigendecomposition:a theoretical and experimental performance study[J].IEEE Transactions on Signal Processing,2000,48(5):1306-1314.
[10]BELLONI F,RICHTER A,KOIVUNEN V.Extension of root-MUSIC to non-ULA array configurations[C]//International Conference on Acoustics,Speech and Signal Processing(ICASSP).Toulouse,France:IEEE,2006:4(5):14-19.
[11]BELLONI F,RICHTER A,KOIVUNEN V.DOA estimation via manifold separation for arbitrary array structures [J]. IEEE Transactions on Signal Processing,2007,55(10):4800-4810.
[12]RUBSAMEN M,GERSHMAN A B.Direction-of-arrival estimation for non-uniform sensor arrays:from manifold separation to Fourier domain MUSIC methods[J].IEEE Transactions on Signal Processing,2009,57(2):588-599.
[13]ZHUANG J,LI W,MANIKAS A.Fast root-MUSIC for arbitrary arrays [J].Electronics Letters,2010,46(2):174-176.
[14]HARRY B,MICHAEL L,WENGROVITZ S.Statistical characterization of the MUSIC null spectrum[J].IEEE Transactions on Signal Processing,1991,39(6):1911-1921.
[15]BARABELL A J.Improving the resolution performance ofeigenstructure based direction finding algorithms[C]//International Conference on Acoustics,Speech and Signal Processing(ICASSP).Boston,America:IEEE,1983:336-339.
[16]CADZOW J A.Multiple source location-the signal subspace approach [J]. IEEE Transactions on Acoustics, Speech and SignalProcessing, 1990,38(7):1110-1125.
猜你喜欢
数学物理学报(2022年1期)2022-03-16 06:15:04
空间科学学报(2020年1期)2021-01-14 00:53:28
中学数学杂志(初中版)(2020年6期)2020-01-06 03:35:20
数学年刊A辑(中文版)(2018年2期)2019-01-08 01:59:46
新闻传播(2018年4期)2018-12-07 01:09:34
新教育时代·教师版(2018年17期)2018-07-21 09:39:38
祖国(2017年21期)2018-01-02 00:55:21
武大国际法评论(2017年6期)2017-05-29 01:08:23
法哲学与法社会学论丛(2017年0期)2017-05-20 09:31:54
湖州师范学院学报(2016年2期)2016-08-21 13:50:52