
人工内分泌情感模型及其在机器人漫游中的应用
2015-09-01 07:03梁建伟
通化师范学院学报 2015年6期
梁建伟
(集美大学 诚毅学院,福建 厦门 361000)
1 引言
随着科学发展中多学科、多领域之间的相互交叉和相互融合,人们不断从生物信息处理机制的深入研究中获得灵感,目前已经提出许多实用的智能模型和相关算法.受神经系统、免疫系统、遗传系统的启发,分别提出人工神经网络、人工免疫系统和遗传算法,相关研究已经取得重大成就.内分泌系统、神经系统和免疫系统相互作用、相互协作,使生物体的各项生命活动正常运转,神经系统和免疫系统的成功引起人们对内分泌系统的浓厚兴趣.目前,典型的研究工作包括:Arkin借鉴内分泌系统在维持机体内稳态中的重要作用,在机器人控制结构中模拟内分泌系统,可以对机器人的行为规划进行相应调整[1-2].Shen W M借鉴内分泌系统所发挥的调节机制,提出一种独特的数字激素模型,对多机器人系统中的通信和控制问题提供了解决方案[3-4].Avila-Garcia根据生存理论及生物活动的周期性,提出仿激素机制,用于调控机器人的行为[5].黄国锐根据内分泌系统和神经系统的相互作用机制,提出集神经、遗传、内分泌系统于一体的自主体控制模型[6].林广栋等人在激素生理机制的启发下,提出一种用于解决多机器人控制问题的分布式控制模型[7].
人类智能不仅需要正常的逻辑推理能力,还必须具备正常的情感能力,情感对于智能系统的重要影响已经得到研究者的广泛关注.Caamero通过模拟人体生理变化提出一种情感模型,利用智能体内激素浓度的变化做出基于动机的行为选择,当动机得到某种满足后,体内激素就会发生相应变化,从而维持体内环境的动态平衡[8-9].Velásquez提出一种模块化的情感体系,说明拥有情感机制的机器人系统具有较强的自适应性[10-11].Sloman在研究智能体的控制系统中指出,对于资源相对有限的智能体而言,情感机制是一种必然要求[12].
生物体的行为受内分泌系统和情感的共同作用,两者的交互是生物体维持生存活动的关键.在生物内分泌情感反应机制的启发下,本文提出一种人工内分泌情感模型及算法,综合利用内分泌系统的调节机制和情感的生理反应机制,控制自主体的行为决策,使其能够在动态环境中具备一定的自适应能力.
2 生物内分泌情感反应机制
内分泌系统是由内分泌腺(包括甲状腺、肾上腺、下丘脑等)及具有分泌功能的组织细胞组成的调节系统,通过分泌各种激素调节各项生命活动,和神经系统相互配合实现体内环境的动态平衡[13].内分泌系统是通过反馈方式发挥调节作用的,包括正反馈和负反馈两种方式,并以负反馈为主.内分泌系统通过激素发挥调节作用的过程如图1所示.其中,下丘脑属于调节作用的中枢,它通过分泌激素对垂体产生影响,垂体通过激素调节靶腺细胞的效应.如果靶腺细胞分泌的激素浓度过大,则会抑制下丘脑和垂体的激素分泌功能.
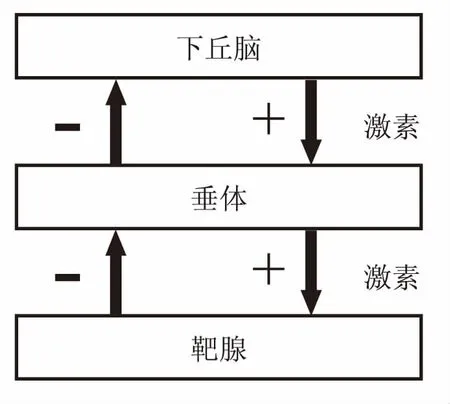
图1 激素调节机制
内分泌系统和情感是相互关联、相互作用的.情感虽然是一种心理现象,但是情感会导致体内发生多种生理变化,称为情感的生理反应.生理学的实验证明,疼痛、视觉、嗅觉等刺激,都可以在一定的条件下产生情感的生理反应.情感的生理反应是多样性的,内分泌系统的情感反应非常重要,通常表现为甲状腺素、肾上腺素等激素的分泌在某些情感状态下发生变化.同时,内分泌系统也对情感产生显著的调节作用[14].
3 人工内分泌情感模型
在前述生物内分泌情感反应机制的启发下,将内分泌系统和情感相结合,提出一种人工内分泌情感模型(Artificial Endocrine Emotion Model, AEEM).图2展示了该模型.
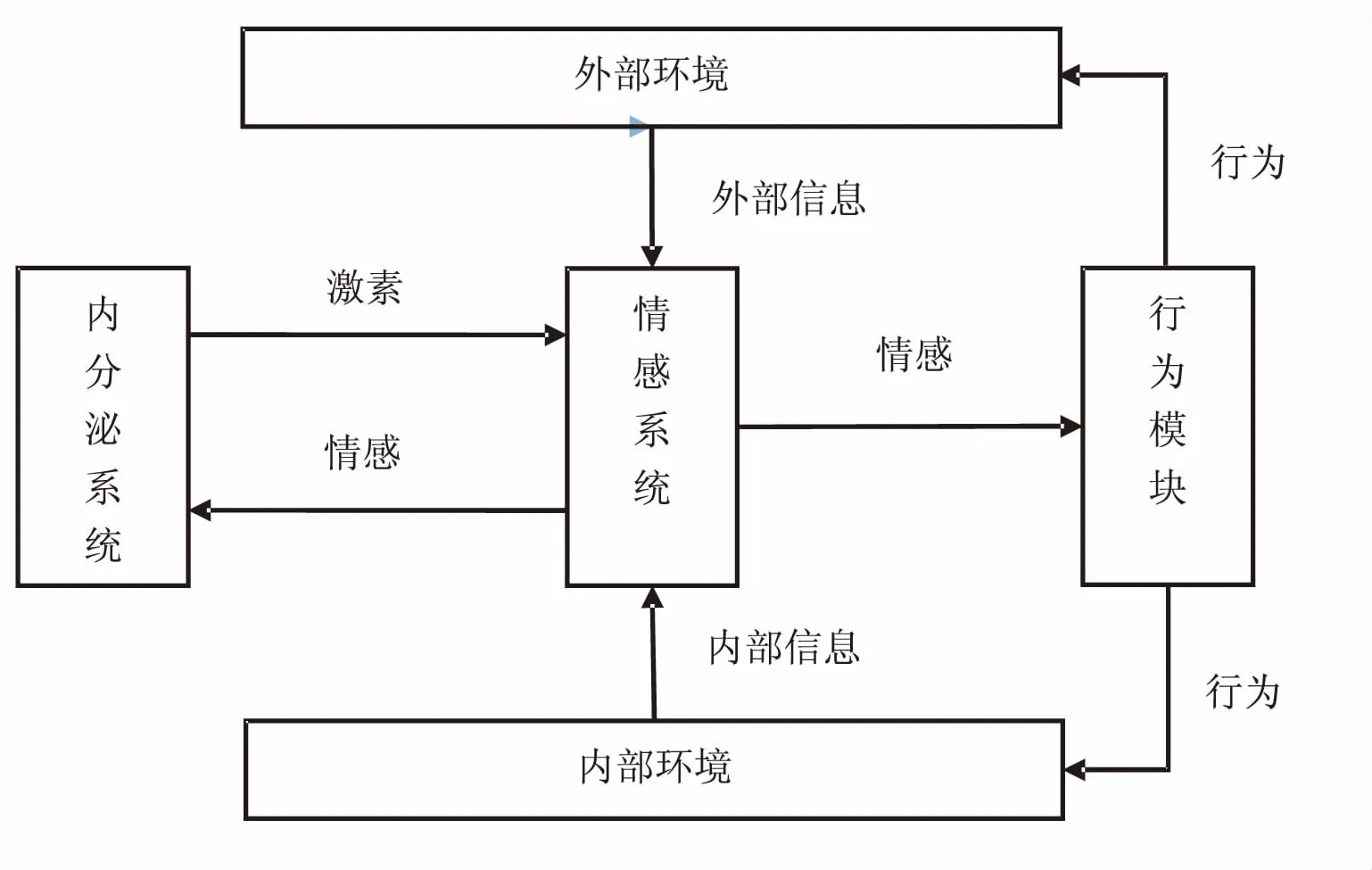
图2 人工内分泌情感模型
该模型主要由内分泌系统模块、情感系统模块和行为模块组成.情感系统根据所感知到的内外环境信息产生初级情感,生成的情感刺激内分泌系统分泌相应激素,激素对情感进行调节后产生高级情感,情感作用于行为模块进行行为决策,所执行的行为结果反馈到内外环境,由此形成一个回路.下面对各个模块进行介绍.
3.1 内分泌系统模块
内分泌系统具有重要的调节作用,其功能包括四个方面:①维持内环境相对稳定.激素可以直接或者间接调节体内酸碱平衡、体温、血糖、血压等参数.②调节机体的新陈代谢.例如,甲状腺素、生长激素等都会影响生物体内的新陈代谢过程.③促进细胞的分化成熟.例如,甲状腺素能够调节神经系统的发育过程,生长激素能够促进很多组织的生长成熟.④调节生殖器官的发育成熟.例如,性激素可以促进生殖器官的生长发育.体内激素虽然存在很多种类,但都是产生增强或者减弱细胞生理效应的作用.因此,本文抽象出两种激素,分别是促进激素(Activator Hormone)和抑制激素(Inhibitor Hormone).促进激素对相关情感起着强化作用,抑制激素对相关情感起着减弱作用.
内分泌系统的主要功能是在情感的刺激下分泌激素,各种情感所分泌的激素种类不同.在某种情感的刺激下,所分泌激素的数量一方面与该情感的强度有关,情感的强度越大所分泌的激素越多;另一方面也受该激素自身浓度的影响,激素的浓度越高,在相同的情感刺激下,新分泌出的激素就越少.本文使用参数1-α表示各种激素的消逝速率.每经过一个时间单元后,各种激素的浓度按照公式1更新.
(1)
其中,C(t)表示t时刻某种激素的浓度,C(t+1)表示t+1时刻该激素的浓度,ΔC表示所有与该激素相关的情感在本次循环中新生成的激素浓度,ΔCi表示和该激素相关的情感i所产生的激素浓度.ΔCi的计算公式如2所示:
(2)
其中,Ei(t)是指情感i在t时刻的强度,MAXEV是指情感强度的最大值,MAXHC是指单次循环中激素浓度的最大改变量,MAXHV是指激素浓度的最大值.从公式可以看出,某一情感所生成的激素浓度随着情感强度的增加而增大,同时随着激素本身浓度的增加而减小.
3.2 情感系统模块
情感系统包含四种基本情感:愤怒、高兴、恐惧和悲伤,它们可以通过机器人对环境的感知而得到,和机器人的各种生存活动紧密联系.考虑到内分泌系统对情感的调节功能,本文将情感分为初级情感和高级情感两类.初级情感是根据内外环境信息直接产生的情感,高级情感则是经过内分泌系统调节后的情感,高级情感作用于行为模块,用于智能体的行为决策.在任何时刻都存在着多种情感,其强度用0~1之间的数值来表示.在某个时刻,如果某种情感强度接近于0,表示该种情感比较弱;如果某种情感强度接近于1,则表示该种情感非常强.
(1)初级情感.各种情感强度随着时间推移逐渐减弱,这里用参数1-β表示情感的衰减程度.每经过一个时间单元,情感强度按照公式3进行调整.
E(t+1)=β*E(t)+ΔEβ∈(0,1)
(3)
其中,E(t)表示t时刻某种情感的强度,E(t+1)表示t+1时刻该情感的强度,ΔE表示新生成的情感强度.对于不同的情感,ΔE计算公式并不同.例如,对于“恐惧”情感,ΔE与主体距离障碍物的远近有关.主体和障碍物的距离越近时,新生成的“恐惧”情感强度越大;反之,新生成的“恐惧”情感强度越小.对于“高兴”情感,ΔE取决于主体当前的生理参数.如果主体的生理参数较好,则新生成的“高兴”情感强度较大,否则较小.
(2)高级情感.由于受到激素的调节,各种情感的强度会得到增强或者减弱,其变化取决于相关联的激素种类及其强度.对于和促进激素相关的情感,促进激素浓度越高,情感强度增加越大;对于和抑制激素相关的情感,抑制激素浓度越高,情感强度减少越多.
(3)过滤机制.智能体在任意时刻都存在多种情感,而在某个时刻,具有最大强度的情感是机器人情感状态的主要特征,称为主导情感.如果某时刻存在两种以上的情感,其强度同为最大值,则任选一种情感作为主导情感.这种选择过程称为情感的过滤机制.情感模块将主导情感传递到行为模块,以便做出有效的行为决策.
3.3 行为模块
根据机器人所分配的任务,可以设定多种不同的行为.例如,在机器人漫游环境中,可以包含进食、避障、休息和漫游等行为.根据主导情感,可以激发不同的行为,行为执行后的结果反馈于内外环境.
3.4 模型算法
本文所提出的模型算法描述如下:
①设置各种情感、激素和内外参数的初始值;
②机器人根据内外环境信息计算出初级情感;
③根据初级情感按照公式计算各种激素浓度;
④激素对初级情感进行调节后产生高级情感;
⑤求出当前时刻主导情感并作用于行为模块;
⑥根据主导情感选择某种预设行为,并执行;
⑦重复步骤②~⑥,直到满足设定的结束条件.
4 仿真实验
4.1 实验设计
为验证模型及算法的有效性,设计了机器人漫游仿真实验.初始实验场景如图3所示.
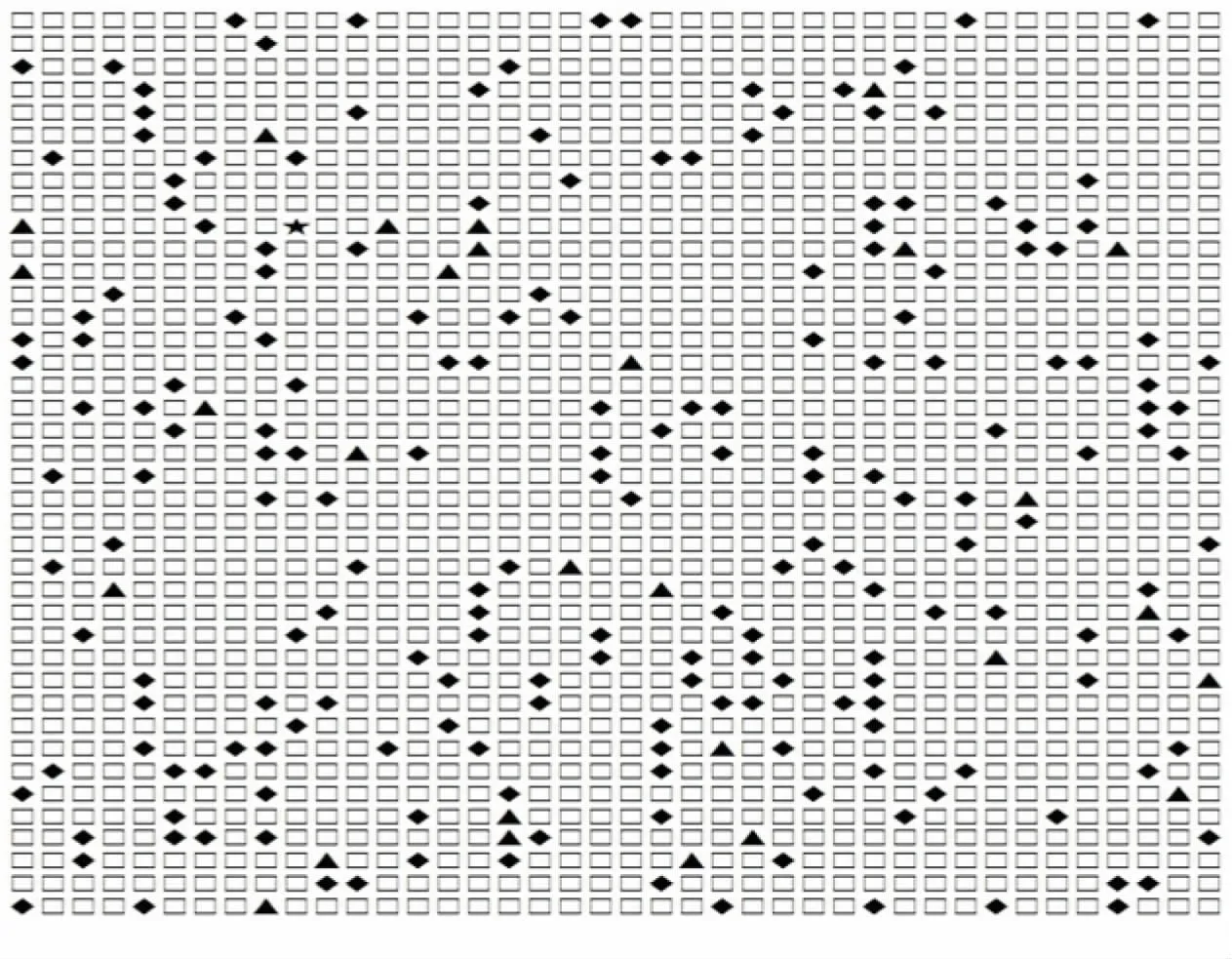
图3 初始实验场景
实验环境为一个50x50的二维格空间.实验中有机器人、食物和障碍物三种物体.其中,★表示机器人,◆表示食物,▲表示障碍物,□表示格子没有任何物体.机器人可以感知食物和障碍物的存在,并且包含能量和活力两种内部参数.为了保持生存活动,能量和活力必须同时大于零,当其中一项为零时本次实验结束.为对比效果,进行两种实验:基于人工内分泌情感模型的实验(AEEM)和随机漫游实验(Random),前者根据情感状态进行行为选择,后者根据内部参数进行行为选择.
4.2 实验结果
根据所设计的实验,得出的实验结果如表1所示:
可以看出,AEEM的效果明显优于Random,主要表现在两个方面:一方面,前者具有更强的生存能力,在同样的实验场景和感知能力下,前者的最大生存步数和平均生存步数均大于后者;另一方面,前者的稳定性更强.在其他条件不变的情况下,随着感知能力的增加,前者的生存能力体现出稳定的增加趋势.然而,由于行为决策过程中随机因素的存在,感知距离增加并不能保证其生存能力一定得到提高,这是符合实际情况的.从表中还可以看出,当机器人的感知距离很大时,两种实验效果比较接近,原因在于机器人的生存能力同时取决于环境中的食物总量、自身的感知能力及所做的行为决策.如果机器人的感知能力非常强,其生存能力将取决于环境中的食物总量,此时行为选择不具有决定作用.然而,在现实世界中,机器人的感知能力总是有限的,行为决策对于其生存非常重要.此外,AEEM和Random相比,前者使得机器人能够更加有效地避开障碍物,具有更强的避障能力.
5 总结
本文首先介绍了内分泌情感反应机制,在此基础上提出一种人工内分泌情感模型,通过仿真实验对模型进行验证.实验结果表明,该模型能有效实现智能体的行为决策,可以使智能体在不断变化的复杂环境中具有较强的自适应能力.
猜你喜欢
保健医苑(2022年4期)2022-05-05
猪业科学(2022年2期)2022-04-21
天津医科大学学报(2021年4期)2021-08-21
中国生殖健康(2020年2期)2021-01-18
中华养生保健(2020年7期)2020-11-16
婚育与健康(2019年11期)2019-12-09
中国生殖健康(2019年8期)2019-01-07
家庭科学·新健康(2016年12期)2017-01-09
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
