右正横后22.5°附近两船相遇的避让分析
2015-08-30 08:51:56李梦霞胡云平
浙江海洋大学学报(自然科学版) 2015年3期
李梦霞,胡云平
(宁波大学海运学院,浙江宁波 315211)
·研究简报·
右正横后22.5°附近两船相遇的避让分析
李梦霞,胡云平
(宁波大学海运学院,浙江宁波315211)
当一船位于船舶右正横后22.5°附近,并且速度大于前船,两船对此会遇态势的判断会出现差错,双方的行动可能不能协调,容易因此出现紧迫局面。本文通过船员对右正横后22.5°左右会遇局面实际处理调查分析与理论知识的结合,充分考虑实际情况,研究两船协调避让行动,给船员理论指导,降低事故的发生率。
追越;大角度交叉相遇;避碰
有关海上碰撞数据统计,在宽敞的水域中,一船从另一船的右舷正横后22.5°附近某一方向驶进前船时,最容易发生碰撞危险。根据《72年国际海上避碰规则》,第十三条追越条款和第十四条对遇局面的情况上中存在着一些比较容易混淆的临界局面,这个特殊的局面是正横后22.5°左右的某一方向上,并且后船的速度大于前船,对其是属于交叉相遇局面还是属于追越不能够立刻做出判断的情况。面对这个临界局面,该如何运用驾驶技能,是避免危险的关键点。
1 海上会遇态势的分类
如图1三种会遇局面方位关系图所示,在①~②区域范围内属于对遇,在②~③和①~④区域范围内属于交叉相遇,在③~④区域范围内属于追越。③和④分别为左右正横22.5°处,是交叉相遇局面与追越局面相重合的部分,因此在③和④这两个方位,不容易正确的判断会遇态势,尤其是在③附近,最容易产生危险。

图1 三种会遇局面方位关系图Fig.1 Three encounter situation orientation diagram
2 右正横后22.5°左右会遇局面分析
根据《72规则》对13条规定:一船正从他船正横后大于22.5°的某一方向赶上他船时,即该船对其所追越的船所处的位置,在夜间只能看见被追越船的尾灯而不能看见它的任一舷灯时,应认为是在追越中。由于《规则》附录1允许舷灯的水平光弧向前或后延伸5°,这样追越条款可以经理解为构成追越应具备三个条件。方位:后船位于前船正横后大于22.5°的任一方向上,但在夜间,由于规则以能否看到尾灯作为是否构成追越的依据,因而,判断追越的范围已从尾灯的法定水平光弧的135°扩大到145°,也即后船位于前船正横后大于17.5°,后船应怀疑处于追越的范畴。距离:规则要求后船位于前船尾灯的能见距离范围之内,一般为2 n mile左右,因此在正横后17.5°~27.5°,也可能同时看见船舶的尾灯和舷灯,而正是由于同时看见了舷灯与尾灯,后船对是否处于追越会怀疑。
当这种容易混淆的会遇局面,发生在前船的右舷时,即后船位于前船右舷正横后22.5°左右的某一方位上并赶上前船时,前后两船对这种会遇局面的确定不能够统一。如图2右正横后22.5°左右会遇局面图,A船可能将这种会遇局面判断为追越,在这种判断下B船成为让路船,A船成为直航船;而B船可能将这种会遇局面判断为大角度交叉相遇,在这种判断下,则A船成为让路船,B船成为直航船。在这样的会遇情况下导致两船都认为自己是直航船而不会立刻做出避让行动,而是等待让路船做出避让行动,从而导致两船形成紧迫局面,甚至避让不及可能最终会发生碰撞。因此,当后船位于前船正横后22.5°左右的某一方向上,并且后船的速度大于前船,两船逐步靠近时,因这种会遇态势是属于交叉相遇局面还是追越的混淆,从而容易导致两船发生碰撞[1]。

图2 右正横后22.5°左右会遇局面图Fig.2 Right on the beam after 22.5°encounter situation
3 船员对右正横后22.5°左右会遇局面实际处理调查分析
大多数船员在处理“A船与B船在海上会遇,B船位于A船右正横后22.5°”这个问题上存在疑问。笔者就这个问题,做了一次问卷调查。这次问卷主要是针对一群有经验的船员进行调查。
图3为调查问卷会遇态势图所示的会遇局面,根据调查数据分析,位于A船情景时,百分之66%的船员会把自己认为是直航船,并且能够在安全距离上做到保向保速,在其认为的让路船显然没有遵守《规则》采取适当的行动时能够在适合的距离上采取避碰行动。但是还是有10%的被调查人员认为自己始终是直航船并且始终保向保速。位于B船情景时,只有44%的人认为自己是直航船,并且能够进行正确和安全的避碰行动,但还是有10%的被调查人员始终认为自己是直航船。在和被调查者的对话中笔者发现,那些始终认为自己是直航船的被调查者抱着自己不让对方也会让,海上很宽广致使碰撞的概率几乎很小的想法。
综上分析,我们可以看出还是有约10%的船员会将此局面混淆,并且不能合理的进行操纵避碰。在此种局面下,给出一套合理的、符合规则的解决方案,是尤为重要的。如果,有那么一套标准的处理措施,所有的船员,按照标准进行操纵。那么,在此种局面的造成碰撞的概率将大大降低。
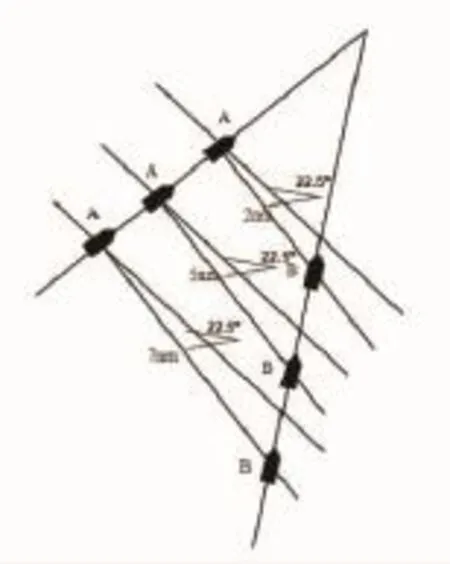
图3 调查问卷会遇态势图Fig.3 Questionnaires encounter situation
4 解决易混淆会遇的方法
本文查阅大量的资料,参阅了大量的避碰案例,结合船员的实际操作,最终,将在从以下四个方面提出相关的解决方法。
4.1明确责任
船舶管理级、操作级和支持级都应该养成工作认真严谨的习惯,从而避免不必要的疏忽导致紧迫局面的形成。各个级别的人员都要严格认真的完成自己责任范围内任务,如:值班驾驶员要及时发现右正横后22.5°附近的来船,做到及早发现及早行动;或者值班水手如发现右正横后22.5°附近的来船,第一时间通知值班驾驶员
在船舶航行过程中,船员应该明确自己的责任,提高自己的情景意识,从而提高船舶的航行安全。驾驶台的每一位成员都要时刻熟知船舶所处状态;能够连续监测船位和船舶航向等,并适时进行调整,以保证安全航行;能够对船舶所处的危险局面进行预判,并使船舶能顺利摆脱危险。
4.2避碰方法学习
平时船员朋友也可以在生活中学习船舶避碰方法,比如,看看相关的文章,看看相关的报纸,或者相互之间聊聊船舶避碰的案例等。笔者总结在船舶避碰方法学习中大致可分为四个阶段[2]:第一阶段,通过分析船舶避碰文献和船舶碰撞案例,建立船舶会遇模型[3],总结海上避碰和碰撞的经验;第二阶段,将总结出的结论与避碰规则进行比较,充分解释和理解避碰规则,并对避碰规则进行量化研究;第三阶段,在解释和理解中发现规则所存在的漏洞,并提出观点;第四阶段,将理解与科技结合,为研制出各种助航仪器来协助船舶避碰做出理论贡献。实际上,这四个阶段是递进的关系,它们是相互联系、相互影响的,这对自身能力的提高有着很大的帮助。
所以,在应对右正横后22.5°附近两船相遇的避让问题时,还是要多分析实际案例学习经验,并且积极主动地推动船舶、航海仪器、避碰规则等的发展,在更小的程度上杜绝危险事故的发生。
4.3避碰行动
根据图4右舷110°交叉或右追越的态势图分析可知,在实际中,根据瞭望和雷达标绘的优先考虑目标来说,乙船一般会先于甲船发现对方,并且对自己所处在一个什么样的位置比较清楚,也比较容易判断,在采取避碰行动方面占有主动性和选择性,因此在这种会遇局面下要求乙船把自己当作追越局面中的让路船是合理的,也是符合《规则》要求的。另外规则十三条第一款规定:不论第二章第一节和第二节的各条规定如何,任何船舶在追越他船时,均应给被追越船让路。这一条款业已明确地指出,追越条款将优先适用于其他有关的条款。

图4 右舷110度交叉或右追越的态势图Fig.4 110 degrees starboard cross or right overtaking situation maps
4.3.1乙船采取加速的避碰行动
通过改变速度上来避碰,笔者认为加速是不合理的,因为加速会缩短两船的会遇时间并且乙船会穿越甲船的船首,所以笔者认为在此时加速避让是不符合良好船艺的要求的。一般在这种情况下,两船的速度差也不会相差很大,所以也无法收到显著效果。
4.3.2乙船采取右转的避碰行动
通过选择向右转向来避碰,平行追越,那么就可以保持有足够的横距,这是一种较为稳妥的方法,但是,如果两船速度差很小,那么甲、乙两船平行航行的时间将会比较长。在这种情况下,因为乙船可能会对自己是否属于交叉还是追越局面产生怀疑,根据《规则》第十三条第3款规定的,所以乙船应该认为自己是让路船。考虑到乙船始终负有让路责任直至驶过让清为止的要求,但是,乙船最后回到自己的计划航线上时,肯定会发现自己与原来的航线偏差很大。关于避让导致的偏航是每一个驾驶员都会考虑的问题,因为这将导致船舶多耗燃料[4];同时,甲船也可能出现意料之外的右转,这让乙船驾驶员很担心,所以,现实中很少有驾驶员会选择在这种会遇局面下保持在右舷平行追越。
4.3.3乙船采取左转的避碰行动
一般说来,在小角度追越局面中,船舶之间的相对速度较小,如果此时乙船能够及时发现甲船,两船间就能够保持足够的距离,在这种情况下应该选择大幅度左转迅速横过甲船船尾,这样两船船首航向就会呈发散状态,航向呈发散状态基本上可以认为是让清,当然大幅度左转迅速横过甲船船尾的避让方法的前提是此时甲船应当保向保速并且乙船遵守《规则》第十三条第4款之规定。
4.3.4甲船采取的避碰行动
在这样的会遇局面下,甲船是被动的,难以做出决策。如果根据“海员通常做法”将甲船认定为交叉相遇局面中的让路船,那么甲船就应该给乙船让路,乙船就是直航船,在这种局面下,甲乙两船相对速度比较小,距离有限,选择右转的话可能将局面陷入更深的危机中。
综合考虑,在这种情况下,甲船应该大幅度左转,这样可以有效避让,但是此时是假定乙船保向保速的。如果此时乙船也按“海员通常做法”将自己认定为追越船而左转,那么两船将会产生新的紧迫局面。
5 小结
笔者对“右正横后22.5°附近两船相遇”进行了一个系统的分析,希望船舶驾驶员能够熟悉“右正横后22.5°附近两船相遇”时的一些概念问题,并且能够熟练掌握在这种会遇局面下的操船方法,从而能够从容应对这种会遇局面。
总而言之,在“右正横后22.5°附近两船相遇”的避让中,应当树立正确的避让指导思想,这是确保成功避让的先决因素,所谓“避让指导思想”可以总结为以下四项内容:
(1)充分估计当时局面,正确判断会遇局面;
(2)明确船舶间责任,立足于早让、宽让、大幅度让;
(3)积极避让、主动配合是确保成功避让的重要因素;
(4)杜绝紧迫局面的形成是确保成功避让的关键。
在此种会遇情况中,关键是双方需要达成共识。无论是乙船假定自己为追越船,还是甲船假定自己为被追越船,只要双方能够达成共识就好了,进行协调避让。笔者建议在规则中或者是在院校培训过程中应该特别的讲解一下这种局面,并且有避碰行动建议[5]。但在这种情况下,最佳方案是统一认为甲船为被追越船,乙船是追越船,因为乙船在行动上有较大的主动性和可选择性。如果发现乙船显然没有按照所说的大幅度左转采取避让行动的话,甲船可以按照《规则》第十七条第2款的要求独自采取避让行动。此时的乙船应该已经越过甲船正横后22.5°,距离已经减小,所以乙船是不会再向左转的,那么甲船就可以采取左转或左旋一周来从容避免危险[6]。
[1]赵月林,赵英伟.会聚追越/交叉中两船的避让[J].世界海运,2002,25(4):1-3.
[2]苏开文.船舶避碰专家系统的研究[D].大连:大连海事大学,2007.
[3]MONTEWKAN J,GOERLANDT F,KUJALA P.Determination of collision criteria and causation factors appropriate to a model for estimating the probability of maritime accidents[J].Ocean Engineering,2012,40:50-61.
[4]MONTEWKA J,HINZ T,KUJALA P,et al.Probability modelling of vessel collisions[J].Reliability Engineering and System Safety,2010,95(5):573-589.
[5]孙立成,王逢辰,夏国忠,等.驾驶员避碰行为的统计研究[J].大连海事大学学报,1996,22(1):1-6.
[6]罗世民,方泉根.对1972年国际海上避碰规则的几点补充修改意见[J].中国航海,1984(2):1-7.
The Avoidance Analysis of Encounter Ships 22.5°Abaft the Beam
LI Meng-xia,HU Yun-ping
(Ningbo University Faculty of Maritime and Transportation,Ningbo315211,China)
When a ship is abaft the beam,and is faster than the ship ahead,the both ships will make a mistake in judging the encounter situation,and their operation may not be coordinated.This text combines the practical treatment,investigation and analysis with the theoretical knowledge of the encounter situation when a ship is abaft the beam,and takes a full consideration of physical truth.It aims at investigating the action of two-ships’coordinated operation,giving the oretical guidance to mariners,and reducing the accident rate.
overtaking;large angle crossing;collision avoidance
U675.96
A
1008-830X(2015)03-0301-04
2015-01-10
浙江省自然科学基金(LY15E080013)
李梦霞(1994-),女,浙江东阳人,研究方向:航海技术.E-mail:1206262017@qq.com
胡云平(1963-),男,浙江东阳人,副教授,高级船长,研究方向:航海技术.E-mail:huyunping@nbu.edu.cn
猜你喜欢
集美大学学报(自然科学版)(2022年4期)2022-09-04 03:13:02
华人时刊(2022年7期)2022-06-05 07:33:56
今日农业(2021年12期)2021-11-28 15:49:26
中国航海(2021年1期)2021-03-10 13:31:32
上海海事大学学报(2018年1期)2018-04-30 05:15:32
航运交易公报(2016年6期)2016-03-05 00:11:31
学习月刊(2015年12期)2015-07-09 03:36:52
航运交易公报(2015年18期)2015-05-27 03:15:36
中国航海(2014年3期)2014-11-28 11:17:08
中国卫生(2014年3期)2014-11-12 13:18:16