
基于NURBS技术的点云数据曲面重建研究
2015-08-29 03:44:28陈展
黑龙江科学 2015年4期
陈 展
基于NURBS技术的点云数据曲面重建研究
陈展
(海军驻中国航天科工集团第三研究院军事代表室,北京 100074)
在反求工程中,点云数据的曲面重建质量直接关系到结果的精确性和实用性。本文基于NURBS技术对点云数据的曲面重建过程进行了研究,建立了点云数据预处理和曲面重建的算法,通过实验验证了文中算法的正确性。
曲面重建;NURBS;点云;反求工程
反求工程要依次经过数据采集、点云数据处理和曲面重建三个过程。常用的曲面模型有贝赛尔曲面、B样条曲面、非均匀有理B样条(Non-Uniform Rational B-Spline,NURBS)曲面[1]等。其中NURBS方法具有可以精确表示二次规则曲线曲面的特点,研究基于该技术的点云数据曲面重建方法,具有重要的学术及应用意义。
1 点云数据的采集与预处理
通常把三维空间内点的集合称为点云,点云的数据个数从几百、几千到几万个不等,排列方式也有散乱点云、扫描线点云、网格化点云等。不同数据采集装备所产生的点云是不同的,所采用的处理方法也是不同的。
1.1数据采集与精简
反求工程采用的测量方法主要有两种:一是传统的接触测量法,二是无接触测量法[2]。本文的数据采集装置是激光扫描仪,通过规划路径,可以获得一系列点的Z坐标值,进而进行后续的点云数据处理与对比分析。采用均匀网格法可以减少数据量,其原理是:首先把所得的数据点进行均匀网格划分(通常由用户指定),然后从每个网络中提取点根据Z值排序,如果某个点位于各个点中间,那么这个点被选中保留,其他点滤除[3]。
1.2数据平滑
经过数据精简的点云数据若直接进行曲面重建,可能出现局部曲率过大的情况,容易增加后期曲面重建时运算负担,所以要进行平滑处理。高斯滤波法以高斯滤波器在指定域内的权重为高斯分布(正态分布),其平均效果较小,在数据平滑的同时,能较好地保持原数据形貌,因而常被使用。高斯滤波算法按式(1)计算。

1.3边缘识别与分割
采集装置采集得到的点云数据不仅包括被测零件点云数据,还包括零件周围台面及台面上其他物体的点云数据。必须进行边缘识别与分割,将被测零件从台面中区分出来。被测零件与台面间的边界主要属于褶皱边界(切矢不连续),可以通过检查曲率半径的方式来判定是否为边界点。
2 基于NURBS技术的曲面重建
NURBS曲面可采用有理分式方法表示为:

在x方向上每隔跨距S取一点的坐标值作为控制点的坐标,从而生成m×n的均匀矩形控制网格。要确定一个NURBS曲面的形状,不光要知道控制点信息,还要知道节点向量和权值。为使NURBS曲面边界与点云数据边界具有更高的重合度,k阶NURBS曲面节点向量的前k+1个参数为0,最后k+1个参数为1。由于点云数据基本均匀分布,权值可以都设为1。在确定控制点网格、节点向量和权值后,就可以通过插值生成NURBS曲面。
3 算法实现
采用上述方法,对如图1所示的点云进行了曲面重建实验,边缘分割结果和曲面重建结果分别如图2和图3所示。在数据平滑过程中,如果一次平滑的效果不理想,可以进行多次数据平滑。对于一个m×n的控制网格,m由扫描路径条数决定,在参数输入区输入n的值,就能根据这个m×n的控制网格分段NURBS曲面,n值的大小决定了重建曲面的精度。从实验结果可以看出,本文算法成功地实现了数据的预处理、分割以及NURBS曲面重建。
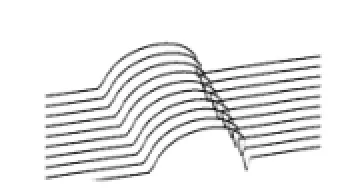
图1 初始点云Fig.1 Initial point cloud

图2 点云预处理结果Fig.2 Pretreatment result of the point cloud

图3 NURBS曲面重建结果Fig.3 NURBS surface reconstruction result
4 结语
在点云数据曲面重建过程中,原始点云数据不能直接用来重建曲面,需要通过数据精简、数据平滑、边缘识别与分割才能生成适于重建曲面的点云数据。从该点云数据中选取适当点作为NURBS曲面的控制点,并赋予适当的权值和节点向量,就能生成NURBS曲面。
[1] WEIYIN MA,PEIREN HE.B-spline surface local updating with unorganized points[J].Computer-Aided Design,1998,(11):853-862.
[2] 苏海.反求工程在工业设计中的应用研究[D].昆明:昆明理工大学,2000.
[3]邱开强,李芳.基于C程序冒泡排序算法的研究与改进[J].电脑知识与技术,2010,(08):198-200,209.
Research on surface reconstruction of point cloud data based on NURBS technology
CHENZhan
(MilitaryRepresentative Office ofNavyin the Third Research Institute ofCASIC,Beijing100074,China)
In reverse engineering,the surface reconstruction quality of point cloud has an important effect on the accuracy and applicability of result.This paper researches the surface reconstruction for point cloud based on NURBS technology,the algorithms for point cloud pretreatment and surface reconstruction are built,and the algorithms are verified byan experiment.
Surface reconstruction;NURBS;Point cloud;Reverse engineering
TP391.7
A
1674-8646(2015)04-0050-02
2015-04-13
陈展(1985-),男,陕西西安人,硕士,助理工程师,从事机电一体化、数字化制造、计算机仿真研究。
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21 09:35:04
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01 07:00:46
数学年刊A辑(中文版)(2019年1期)2019-01-31 02:35:28
数学物理学报(2018年5期)2018-11-16 05:49:44
北京航空航天大学学报(2017年4期)2017-11-23 05:48:22
自动化学报(2017年7期)2017-04-18 13:41:02
中国工程咨询(2017年12期)2017-01-31 02:56:54
浙江大学学报(工学版)(2016年10期)2016-06-05 09:20:56
安徽地质(2016年4期)2016-02-27 06:18:21
全球定位系统(2015年4期)2015-02-28 12:38:12
