
基于路径规划的智能环境监控系统
2015-08-29 11:11:26张义群程树英福州大学微纳器件与太阳能电池研究所福建福州350108
网络安全与数据管理 2015年5期
张义群,程树英(福州大学 微纳器件与太阳能电池研究所,福建 福州 350108)
基于路径规划的智能环境监控系统
张义群,程树英
(福州大学微纳器件与太阳能电池研究所,福建福州 350108)
基于S3C2440嵌入式处理器的自主移动智能小车系统能在安卓客户端发送目的地位置信息后,完成路径规划并自动避障。处理器将小车上搭载的功能传感器所采集到的实时数据信息反馈到客户端,实现对室内质量状况(实时视频监控、温度、湿度和烟雾指数)的动态环境监测,并于定点位置安装功能传感器,采用 ZigBee无线模块实现定点的环境数据采集与运动系统交互,进而反馈到客户端。而当运动系统电量不足时,在自动充电单元控制下自动完成充电过程。测试结果表明,该运动系统能够稳定运行,具有良好的实时性。
S3C2440;嵌入式;自主移动;路径规划;自动充电;环境监测
0 引言
目前市场上的环境监控摄像头大多采用定点安装,通过摄像头的转动来采集室内环境的实时情况,其不足在于不仅存在监视死角,且需要多个定点安装[1];而对于室内的温度、湿度和烟雾环境质量状况的监测则是通过定点安装传感器来采集实时数据,从而反映出环境质量的实时状况。因此,该方案需要定点安装数量不少的摄像头和传感器,极大地浪费了人力物力[2]。虽然国内外已有采用基于路径规划算法[3](大多采用的是蚁群算法、遗传算法和人工神经网络算法)的机器人来无线监控室内环境以及监测环境数据信息,然而这些算法具有一定的复杂性,并且与起点位置和障碍分布有关,可能造成路径迂回。
本设计基于导航组件,对使用智能小车作为载体的运动系统进行路径规划;采用超声波测距模块自动避障;当智能小车电量不足时,可在自动充电单元的控制下自动完成充电过程。从而实现室内环境的自主移动监控和温度、湿度、烟雾指数的数据采集。
1 系统总体结构
图1为本设计的系统结构框图。系统以 S3C2440嵌入式处理器作为控制中心,采用安装有导航组件、电机驱动模块和特定功能传感器的智能小车作为运动数据采集系统;通过 ZigBee组网通信,将运动系统采集到的视频数据和传感数据以及固定节点采集到的传感数据汇总到运动系统的嵌入式服务端,用户可以使用安卓客户端,通过WiFi来无线实时操控和监测室内环境状况;而运动系统电量不足时,在自动充电单元控制下,小车自动完成充电过程。
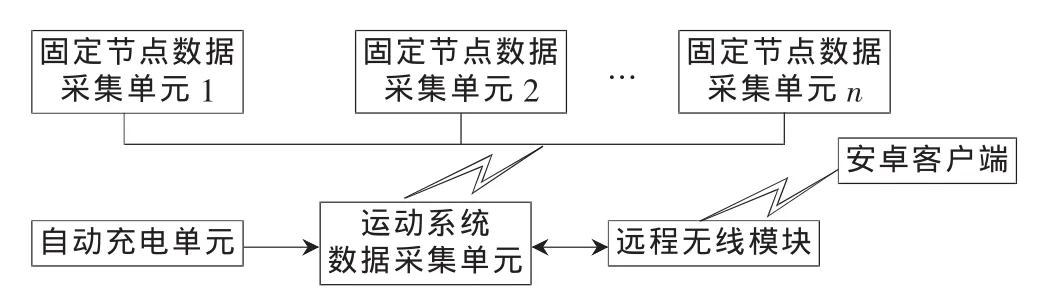
图1 系统结构框图
2 运动系统设计
2.1智能小车路径规划
路径规划算法是在导航组件的基础上进行设计,该导航组件由 GPS模块数字罗盘和霍尔传感器组成[4-5]。
如图2所示,假定作为运动系统载体的智能小车位于一平面上,将其起始位置用平面坐标XY上的S点标记,图中箭头方向即为小车的车头方向,E点为安卓客户端所输入的目标终点。

图2 路径算法模型
在XY平面上连接起点S和终点E,直线SE与x轴方向(假定x轴方向地理位置为正东方向)之间的夹角为α:
α=tan-1((y1-y0)/(x1-x0))=tan-1(Δy/Δx)
式中,Δx=x1-x0;Δy=y1-y0;(x0,y0)为小车当前点 S的坐标;(x1,y1)为安卓客户端所输入的目标终点E的坐标。
在不考虑障碍物的情况下,形成一条理想化的直线路径,即小车从当前位置 S(x0,y0)直线运动到目标位置E(x1,y1)。GPS模块数字罗盘能够测出智能小车的车头起始位置与正北方向(y轴方向)之间的夹角为β,则车头方向与SE直线间的夹角φ=β+(90°-α)。通过嵌入式处理器测算,调整车头方向,使小车正对S■→E方向朝目标点E驶去。而在小车行走过程中,采用霍尔传感器记录小车行走的路径。小车在行走的过程中可能会遇到各种各样的障碍物,因此必须检测并顺利躲避障碍物,使得小车可以安全准确到达预设目标点。如图3所示,箭头所指方向为小车车头方向,在小车的右前方、正前方、左前方、右后方、左后方安装5个超声波测距避障模块。

图3 超声波模块布置
若相应方向的超声波模块测距后检测到障碍物(图2中不规则阴影部分为障碍物),则嵌入式处理器给小车下达执行避障的命令。当小车处于前进状态,且前方的3个超声波模块均检测不到障碍物时,则认为已避开障碍物[6]。这时,处理器重新读取小车当前的 GPS坐标E′(x1′,y1′),以当前即时位置 E′的坐标更新原始位置 S的坐标,便得到更新后的x、y值;而后再设置理想化直线E′E,重新规划导航路径。如此反复,直到x、y的值小于预设的阈值后,则认为在误差范围内,小车已到达目标终点 E(x1,y1);然后通过嵌入式控制中心给客户端一个反馈,从而客户端可以监测该位置的视频信息、温度、湿度和烟雾指数值以及报警模块反馈的安全状态(客户端显示的信息同时也包含了用户关心的固定节点采集到的数据信息)。
智能小车在从 S(x0,y0)向 E(x1,y1)行进的过程中,遵循以下原则:
(1)在外部环境条件允许的情况下,运动轨迹仅是理想化路径的近似曲线。
(2)当外界存在障碍物时,小车先进行避障任务,避开障碍物或远离障碍物后(即图2中 E′点),再读取即时GPS坐标,重新规划导航路径。
2.2智能小车自动充电设计
在充电电源处放有强光,而小车上安装有趋光模块(由5个光敏电阻组成的趋光电路),模块的光敏电阻阻值随光强而变化。为了减小外界无关的光线影响,在每个光敏电阻上,套上用黑胶带做成的桶行冒[7],其目的是可较准确地检测出各个方向的光强,方便处理器的控制,减小检测误差。通过对光敏电阻检测到的光强转换电压与预设的阈值比较,完成小车追踪光源的任务。
每个光敏电阻检测一特定扇形区域,如图4所示,该区域角度为α。经过测试,α在32°左右即可。在寻光过程中,当光敏电阻追踪到光时,其阻值发生变化,处理器检测变化信号并产生相应的指令来驱动电机,从而改变小车的行进路线。当小车路线改变后,相应地光敏电阻接受到的光强也随之发生变化;在电源处放着一块强力磁铁,而小车上放有一块金属片,当小车通过寻光行驶到电源处,停止前进,在电源处的磁铁实现电源与小车的对接功能,从而实现自动充电;而处理器一旦监测到小车电池电压达到电量充满的阈值时,驱动电机使小车与磁铁脱离吸合状态。因此,该运动系统在室内环境的动态监测过程中不用考虑电量不足的问题,能更好地实现人性化的环境监测。
2.3智能小车避障策略
智能小车在行进过程中遇到障碍物时所采取的策略如表1所示。当超声波模块检测到障碍物时,相应模块的电平为“1”,否则为“0”;“X”为任意状态;D1和D3分别为1号和3号测距模块所测障碍物距离。
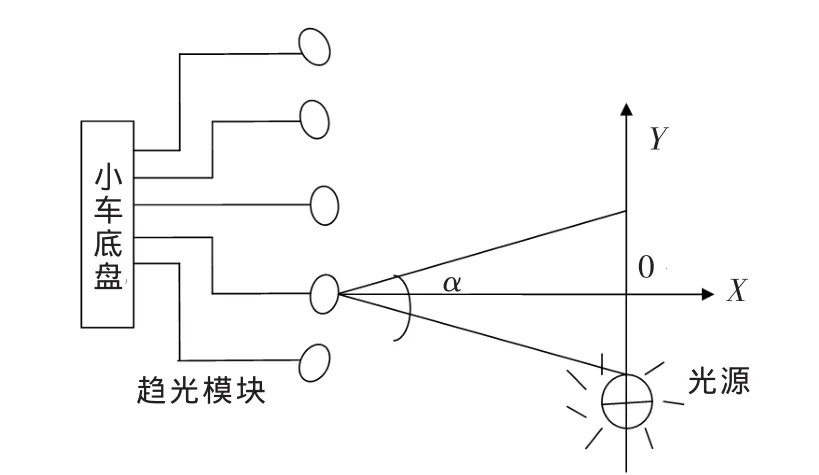
图4 追踪光源原理图
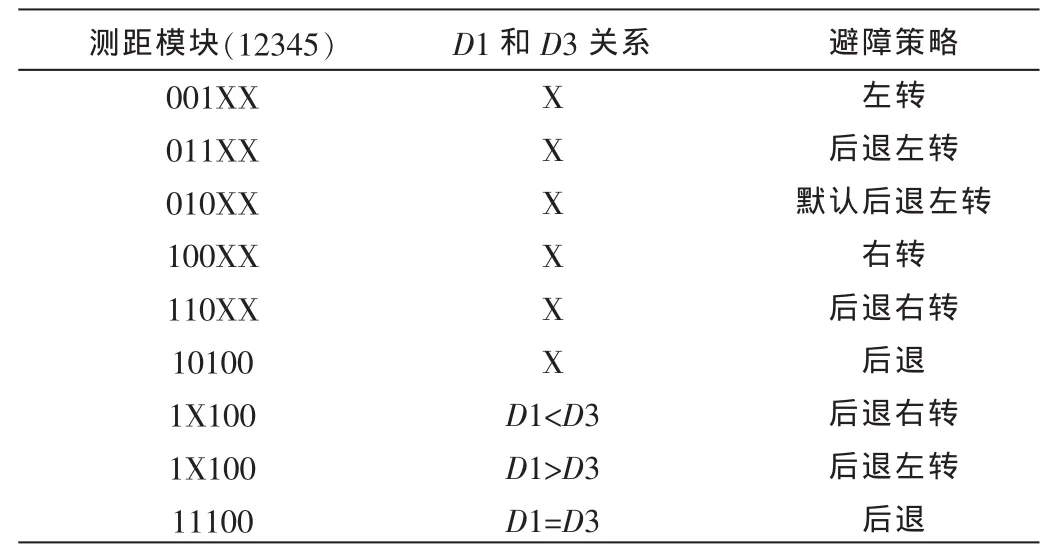
表1 智能小车避障策略
3 实现结果
在空旷的操场上自动规划智能小车行走路径。图5为小车的实测行走路径,小车从S点出发,先后经过预设目标点E1、E2、E3;在行进过程中,小车遇到了障碍物,需进行自动避障,因此整条路径行成了S型,而非理想的直线路径,S到E3之间的直线距离为25 m。

图5 智能小车的实测S型轨迹
小车从起始点出发的行进过程中,通过GPS模块数字罗盘能够测出智能小车的车头起始位置与正北方向之间的夹角为β,因此在不同的时间内,车头方向与小车当前位置到目标点直线间的夹角φ=β+(90°-α)可通过处理器测出。由此可获得智能小车方向角φ与时间的关系图,如图6所示。小车在出发点S处与目标点E1,开始存在一个方向角,设置好目标点E1后,小车迅速调整车头位置,使车头正对目标点,并前进;在行进过程中,由于没有遇到障碍物,方向角在0°左右波动,在误差允许的范围内;当小车行走到目标点E1时,随即获取到前往目标点E2的命令,在E1位置存在障碍物,因此方向角变化需要一定的时间。当车头方向调整到正对目标点 E2时,方向角在 0°左右波动,在误差允许的范围内。从图中也可以看出,从E2到E3也满足设计的需求。小车在28 s内,自主移动,成功到达终点。

图6 智能小车方向角φ与时间关系
4 结束语
本系统使用安卓客户端远程无线控制运动系统,并监测室内环境数据和安全状态,智能小车可自动充电。对于室内环境的监测有两种模式:一种是智能小车完成路径规划和自动避障动态监测室内环境状况 (视频监控、温度、湿度及烟雾指数),质量状况超过安全值时自动报警并反馈给客户端;而另一种模式是使用客户端实时控制智能小车走向,并且安卓手机上实时显示所有传感器的实时传感数据,对特别关心的地点可拍照传回,保证一些安全隐患早发现早预防,对保护人身财产安全等起到至关重要的作用。系统具有很大升级空间,可以扩展功能,实现更为复杂的控制。
[1]WATANABE K,UMEMURA M,HIGASHIKUBO M.Development of video surveillance device[Z].Sumitomo Electric Industries Ltd,2013(76):90-93.
[2]BARRERA E,RUIZ M,MACHON D.PXI-based architecture for real-time data acquisition and distributed dynamic data processing[J].IEEE Transactions on Industrial Electronics,2006,3(53):923-926.
[3]THOMPSON B,YOON H S.Efficient path planning algorithm for additive manufacturing systems[J].IEEE Transactions on Components,Packaging and Manufacturing Technology,2014,9(4):1555-1563.
[4]ZIDEK K,RIGASOVA E.Path planning algorithm based on search algorithm,edge detector and GPS data/satellite image for outdoor mobile systems[J].IEEE International Symposium on Applied Machine Intelligence and Informatics(SAMI),2012,11(26):349-354.
[5]温阳东,王祥好.基于线阵 CCD的智能小车路径识别系
统[J].合肥工业大学学报(自然科学版),2009,9(32):1348-1352.
[6]KIM S J,KIM B K.Dynamic ultrasonic hybrid localization system for indoor mobile robots[J].IEEE Transactions on Industrial Electronics,2013,60(10),4562-4573.
[7]纪欣然.基于 Arduino开发环境的智能寻光小车设计[J].现代电子技术,2012,15(35):161-163.
Intelligent environmental monitoring system based on path planning
Zhang Yiqun,Cheng Shuying
(Institute of Micro-Nano Devices&Solar Cells,Fuzhou University,Fuzhou 350108,China)
An autonomous mobile intelligent vehicle system based on the S3C2440 embedded processors can automatically complete path planning and obstacle avoidance after Android client sends location information.The processor will feature a small car equipped with sensors to collect real-time data and feedback it to the client,achieve dynamic monitoring for the environmental quality of indoor situation(real-time video monitoring,temperature,humidity and smog index).And the functional sensors are installed in the designated locations,which use the ZigBee wireless module to achieve the interaction point of environmental data acquisition and motion systems and then back to the clients.When the motion system is in low supply power,it will be charged under the automatic control of the charging unit automatically.The test results show that the motion system is stable and has a good real-time.
S3C2440;embedded;autonomous mobile;path planning;auto charging;environmental monitoring
TP274.2
A
1674-7720(2015)05-0082-03
(2014-11-05)
张义群(1990-),男,硕士研究生,主要研究方向:嵌入式系统、图像处理。
程树英(1966-),女,教授,博士生导师,主要研究方向:光伏材料、器件及其应用。
猜你喜欢
快乐语文(2020年36期)2021-01-14 01:10:32
科学大众(2020年17期)2020-10-27 02:49:02
动漫界·幼教365(中班)(2020年3期)2020-04-20 11:03:27
铁道通信信号(2020年9期)2020-02-06 09:15:54
文苑(2018年22期)2018-11-19 02:54:18
电子制作(2018年8期)2018-06-26 06:43:02
电子设计工程(2015年12期)2015-02-27 12:06:20
汽车零部件(2014年1期)2014-09-21 11:41:11
小青蛙报(2014年1期)2014-03-21 21:29:39
城市道桥与防洪(2014年5期)2014-02-27 07:26:44
