
基于数传电台的低空监视系统研究
2015-08-29 11:11赵昂海丰通航科技有限公司北京100070
网络安全与数据管理 2015年5期
赵昂(海丰通航科技有限公司,北京 100070)
基于数传电台的低空监视系统研究
赵昂
(海丰通航科技有限公司,北京 100070)
随着国家低空开放的进度加快,如何进行有效的低空空域监管成为一个急需解决的问题。基于数传电台和DSP开发技术,提出了一种可靠的低空监视系统解决方案,结合卡尔曼滤波算法,提高了定位精度和位置预估水平。通过实验验证了系统的可靠性。
低空监视;通用航空;数传电台;DSP
0 引言
随着低空开放的逐步推进,小型民用机场及直升机起降点越来越多,同时,低空飞行器进行的飞行活动也逐渐增多,低空开放在成为新的经济增长点的同时也带来了安全问题。作为管制单位,如何保证辖区内的低空飞行器可见,已成为一个急需解决的问题。而作为航空公司的航务人员,如何实时监控自己飞行器的位置也成为开展航务工作的一个技术难题。
针对以上问题,国际上通用航空发达国家采用如下两种解决方案:
(1)ADS-B,即自动相关监视广播技术,它是利用空地、空空数据通信完成交通监视和信息传递的一种航行新技术。国际民航组织将其确定为未来监视技术发展的主要方向[1]。ADS-B目前在国内应用还处在初级阶段,其优势是属于国际民航推荐的标准,但是机载设备昂贵,地面站选址难,建设成本高。
(2)基于卫星通信设备,它通过GPS获得定位信息,进而通过铱星、海事卫星等通信手段把数据传输到地面站,从而实现监视的目的[2]。此类产品相对ADS-B来说硬件成本更低,但是由于卫星通信资费比较昂贵,所以并不适合在国内通航领域推广。
基于以上总结,结合国内通用航空低空监管需求,提出一种基于数传电台的低成本监视设备设计。
1 系统组成
基于数传电台的低空监视设备系统原理方案如图1所示。系统由机载端和地面端两部分组成,机载端由DSP主板、GPS和数传电台组成,通过 433 MHz频段通信;地面端由地面站、数据存储设备和客户端应用组成,其中,地面站通过大功率数传电台接收辖区内机载监视设备的信号,并且向机载监视设备发送轮询信号,处理接收到的定位信息,信息经过以太网进入服务器存储,并且提供给客户端做实时监控。
2 系统硬件设计
2.1机载监视设备
机载监视设备主要负责接收GPS定位信息,并响应地面站的轮询信号,通过数传电台发送定位信息给地面站,设备组成原理图如图2所示。

图1 系统原理结构图

图2 机载设备原理图
设备基于 DSP实现,考虑系统的控制需求,DSP采用TI的TMS320F2812芯片,TMS320F2812采用改进的哈佛结构,8级流水线操作,运算速度达 150 MHz,集事件管理模块、SCI模块、SPI模块、A/D模块、CAN模块等为一体,集成度高,运算速度快[3]。机载端使用两个 TTL电平串口,其中一个串口连接高精度 GPS,另一个连接数传电台。由于设备接口不同,需要两个串口做 TTL-232电平转换,TTL转232部分电路图如图3所示。
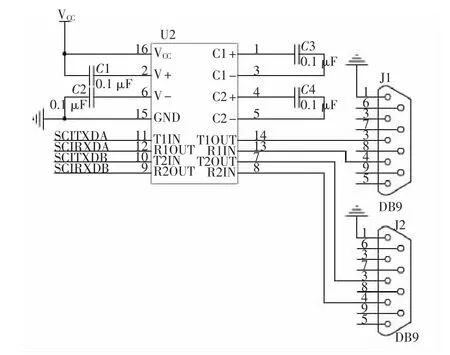
图3 TTL转232电路图
高精度GPS把包含飞行器经度、纬度、高度、航速、航向、定位时间等信息的GPS报文通过232串口接入TMS320F2812,TMS320F2812进行相应的解析和数据处理工作,同时,数传电台把处理之后的数据传入地面站,并响应地面站的其他请求。
2.2地面站
地面站主要负责与机载监视设备通信,并且通过轮询方式接收各机载监视设备发送的定位信息。主机采用嵌入式工控机,连接30 W功率数传电台并配备全向高增益天线。系统原理图如图4所示。
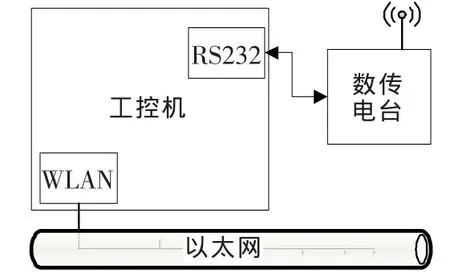
图4 地面站原理图
3 系统软件设计
3.1软件流程设计
地面站的监控距离在一定地理条件下保持在有限范围内,当需要覆盖足够大的范围时,就需要在不同地点部署足够多的地面站,这就带来了管辖范围划分以及机载端入网、脱网问题。其次,装备有机载监视设备的飞行器从一个地点飞到另一个地点,需要沿途不同的地面站的监视才能保证整条航路的实时监视,这就带来了飞行器身份数据传递的问题。基于以上两个问题,提出系统处理流程。机载端软件流程图如图5所示。地面站软件流程图如图6所示。
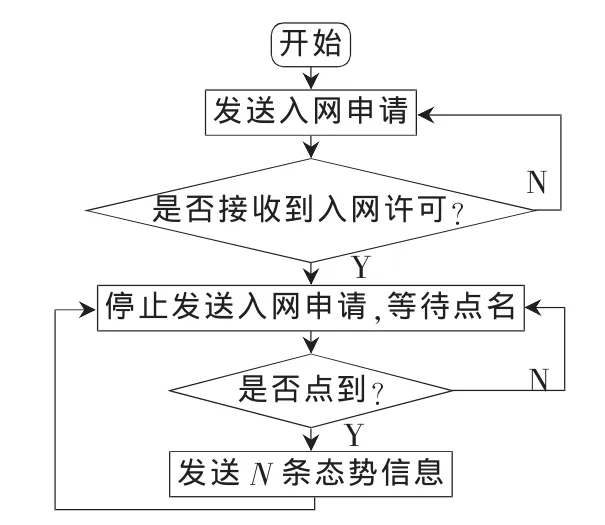
图5 机载端软件流程

图6 地面站软件流程
机载监视端在启动之后,便不停地对外发送入网申请,一般情况下,离该机载端最近的地面站会收到其入网申请报文,地面站在查询自己下属名单之后,确认该机载监视设备是否归自己管辖,若归自己管辖则将其加入到点名列表中,同时给机载端发送入网许可报文,否则忽略请求。地面站在接收入网申请报文的同时根据点名列表不停轮询列表中的机载监视设备,轮到某机载监视设备时,则向该设备发送点名报文,机载端在接收到点名报文之后,则回复最新的位置报文,若因通信等因素造成发送不成功,地面站则在超过一定时限后认为该机载端通信不畅,若连续N次点名均未得到回应,则认为该机载端已离开地面站的管辖范围,地面站则将该机载端从点名名单中剔除。如此,便实现了机载端入网脱网,地面站轮询点名获取实时态势的功能。
地面站工控机采用 Windows操作系统,软件基于C#语言,机载端软件基于 C语言,通过 TMS320F2812仿真器完成调试工作。机载端包括定位和通信两个模块。定位模块功能为接收GPS信息,同时根据GPS报文格式解析报文;通信模块主要负责与地面站的交互,通过串口操作数传电台对通信报文进行收发。
3.2机载端定位误差消除算法
为了提高GPS的定位准确性以及在丢失 GPS信号时进行飞行器位置预估,在定位模块里添加了卡尔曼滤波算法。卡尔曼滤波是现代控制理论发展过程中产生的一种最优估计技术,它是用于估计动态系统测量的一种较好的滤波方法[4]。应用步骤如下:
(1)GPS误差建模。GPS误差包括距离误差和速度误差,通常可以将GPS误差模型取为:
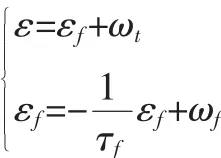
其中,τf为时间常数;ωt和 ωf为高斯白噪声。
(2)系统建模。飞行器的运动模型和GPS误差模型组合,便是系统的状态模型,根据卡尔曼滤波算法,用一个线性随机微分方程来描述[5]:
X(k)=AX(k-1)+BU(k)+W(k)
系统测量值:
Z(k)=HX(k)+V(k)
其中,X(k)为 k时刻的系统状态,U(k)是 k时刻对系统的控制量,A、B是系统参数,Z(k)为k时刻的测量值,H是测量系统参数,W(k)和V(k)为噪声。
根据卡尔曼滤波原理,可以根据上一时刻的飞行器的态势信息预测下一时刻的状态。假设系统状态是k,根据系统模型,现在状态为:
X(k|k-1)=AX(k-1|k-1)+BU(k)
结合预测值和测量值,可以得到现在状态k的最优化估算值。
为了让GPS的定位信息可以不停地得到优化,则需更新k状态下的置信度,如此循环,就可以不停地回归运算下去。经过卡尔曼滤波的GPS位置信息,不会出现因卫星通信不畅问题造成的错码现象,大大提高了数据的可用性。
4 实验与总结
为了验证系统的功能和性能,进行了两次不同地理环境下的实验,实验结果如表1所示。
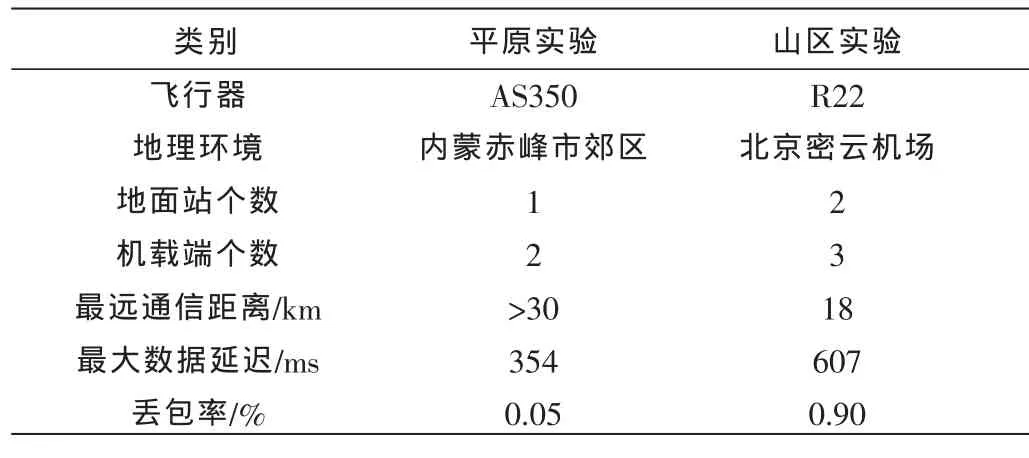
表1 实验结果
平原实验选址在草原进行,地势平坦,气象条件较为理想,由于实验环境较为空旷,且无电磁干扰,通信距离较远,而且由于探矿作业飞行较为规则,无特殊的机动动作,故不存在天线遮挡问题,所以达到了良好的实验效果。
山区实验地理环境较为恶劣,且该机场飞行任务多为训练飞行,会进行各类训练科目,山的遮挡和机动动作等因素导致通信链路出现了较多的断链问题。此问题将在下一步的工作中继续研究。
5 结论
基于DSP开发技术,给出一种采用数传电台作为通信手段的低空监视系统,为保障低空飞行器安全,实时监控管制低空飞行器提供了可行的技术手段,通过实验,证明了系统的可用性和可靠性,也为下一步建立低空空域监管体系奠定了基础。
[1]刘国锋.简述 ADS-B IN技术在中国的应用前景[J].电脑知识与技术,2012,8(3):704-706.
[2]艾国祥,施浒立.基于通信卫星的定位系统原理[J].中国科学,2008,38(12):1615-1633.
[3]孟凡菲,王文君,俞竹青.基于 DSP2812无刷直流伺服电机控制系统的开发[J].常州大学学报,2010,22(2):42-44.
[4]丁传炳,王良明,常思江,等.卡尔曼滤波在 GPS制导火箭弹中的应用[J].南京理工大学学报,2010,34(2):157-160.
[5]蔡艳辉,程鹏飞,李夕银.用卡尔曼滤波进行 GPS动态定位[J].测绘通报,2006(7):6-8.
Research on data radio based low altitude airspace surveillance system
Zhao Ang
(Haifeng General Aviation Technology Co.,Ltd,Beijing 100070,China)
Along with the open of the low altitude space,how to carry out the effective solution for low altitude airspace surveillance has become an urgent problem.The paper puts forward a solution of low altitude surveillance system which based on data radio and DSP.Combined with Calman algorithm,the system improves the positioning accuracy and position estimation level. The reliability of the system is verified by experiment.
airspace surveillance;general aviation;data radio;DSP
V24
A
1674-7720(2015)05-0051-03
(2014-11-03)
赵昂(1984-),男,硕士,工程师,主要研究方向:航空电子、导航控制。
猜你喜欢
计算机测量与控制(2021年8期)2021-08-23
载人航天(2019年1期)2019-03-07
电子制作(2019年23期)2019-02-23
北京航空航天大学学报(2017年9期)2017-12-18
北京航空航天大学学报(2017年9期)2017-12-18
航空模型(2016年5期)2016-07-25
南方文学(2016年3期)2016-06-12
电测与仪表(2016年21期)2016-04-11
中国房地产业(2016年8期)2016-03-01
电源技术(2016年9期)2016-02-27
