基于粒子群的多细胞状态估计技术
2015-08-22 09:45陈庆兰任亚运徐本连
常熟理工学院学报 2015年2期
陈庆兰,任亚运,徐本连
(常熟理工学院 a.机械工程学院;b.电气与自动化工程学院,江苏 常熟 215500)
基于粒子群的多细胞状态估计技术
陈庆兰a,任亚运b,徐本连b
(常熟理工学院 a.机械工程学院;b.电气与自动化工程学院,江苏 常熟 215500)
针对细胞动力学特性差异、细胞变形、细胞数目变化、细胞近邻等估计难题,提出了一种基于粒子群优化方法来实现多细胞状态估计.首先,针对已存在细胞和新出现细胞设计了两种不同的搜索机制,提出了一种标准的PSO算法且无需检测模块来实现多细胞状态估计;在此基础上,引入细胞检测模块,提出一种基于改进的PSO算法来实现多细胞状态精确估计.实验结果表明,本文所提出的PSO跟踪策略能自动实现多细胞状态估计,在引入细胞检测模块后,跟踪性能提高50%以上,每帧平均耗时减小,并且在处理多细胞近邻问题时具有良好的跟踪鲁棒性.
多细胞跟踪;粒子群优化;状态估计
1 引言
多细胞跟踪是指对细胞的运动速度、位移、轨迹、形状等状态进行定性或定量的分析,它是进行细胞活性、细胞迁徙和细胞趋向性等细胞生物学和生物制药研究的有效方法和必要手段.传统的以人工为主的方式观察被研究细胞的活动,不仅效率低,而且还附带观测者主观因素的影响.与人工细胞跟踪方法相比,自动跟踪方法耗时少,误差小,实用性更强,但由于细胞的多变性、外界干扰等因素给细胞自动跟踪的研究带来了巨大的挑战,这使得研究一种自动可靠的多细胞跟踪技术变得极为迫切[1].
目前多细胞自动跟踪方法包括三类:基于检测和关联的跟踪方法,基于模型演变的跟踪方法,基于滤波与采样的细胞跟踪方法[2].基于滤波与采样的细胞跟踪方法模仿人类视觉系统在图像序列中估计目标运动流,能够通过整合高维度的空间、时间和先验信息来解决问题,更好利用时序信息和所研究细胞动力学特征的先验知识,其跟踪性能明显好于前两种方法.粒子滤波器(PF)常被用于细胞跟踪,但是在估计目标当前状态的后验分布之前,需要知道测量模型和运动模型[3].Juang首次把混合高斯概率假设密度函数(GM-PHD)滤波器应用于多细胞跟踪,在对细胞宗谱的研究中发现这种滤波器能够很好地跟踪细胞的世系和细胞的运动情况[4].Rezatofighi提出了LGJMS-PHD滤波器的解析式,包含了状态独立的转移概率和分裂转移概率,这个滤波器明显减少了对于存在大量细胞和检测噪声时的处理时间[5].REZA提出了多贝努利滤波器的一种序贯蒙特卡罗方法,该方法不需要检测模块,直接利用从低质量的图像序列中提取出的时空信息,属于检测前跟踪技术[6].
粒子群优化算法的发展始于1995年Kennedy和Eberhart提出的基本粒子群算法[7].随着粒子群算法的发展,粒子群算法具有适应性强、灵活性好,且能寻找图像分割最优阀值等特点.Zhang提出了一个基于物种的PSO算法,把总群分成多个子群用来实现多目标的跟踪,通常情况下这些粒子群相互独立地跟踪目标,而当目标间的重合区域大于特定阀值时,这些粒子群会发生相互影响并且当跟踪目标产生严重的交互和频繁的遮蔽时,会导致跟踪失败[8].因此,Myo Thida等人提出了一种基于交互式粒子群的多目标跟踪算法,它使用交互式的群来跟踪人群中的行人,该方法能够很好地解决跟踪中的遮蔽问题[9].
2 标准PSO算法原理
PSO算法是用来寻找d维空间中最优解的一种全局优化算法,在搜索空间中随机初始化一系列粒子
,其中 N表示粒子总数.每个粒子都是d维空间中的一个候选解,所以第i个粒子可以表示为xi={xi1,xi2,⋅⋅⋅,xid},每个粒子都有对应的适应度函数值 f(xi)及速度vi={vi1,vi2,⋅⋅⋅,vid},粒子在空间中的运动基于三个方面:1)粒子保持自身当前运动或速度的能力,2)粒子 i目前所找到的最优位置整个群体所找到的最优位置,其中

粒子在第(n+1)次迭代时的速度位置更新公式为

其中ω指惯性权重,它起到控制粒子当前速度的作用;c1和c2为学习因子,其使粒子具有自我总结和向群体中优秀个体学习的能力,从而向自己的历史最优点以及群体内历史最优点靠近.参数r1,r2∈(0,1),且是均匀分布的随机数.通常需要对每个速度矢量定义一个最大速度:‖vi,j‖≤vmax,j(j=1,2,⋅⋅⋅,d),这能有效防止粒子在搜索过程中超出搜索范围.
3 基于PSO的多细胞跟踪算法
3.1基于无检测模块的PSO多细胞跟踪
在标准PSO框架中受群体智能的启发,很容易实现对单一目标的跟踪,然而这种方法很难用来解决多细胞跟踪,特别是当细胞处于近邻时,容易导致跟踪的失败.假设在一组图像序列中有多个细胞,这些细胞在整个图像中随机运动,由于图像大小的限制,就会产生新细胞的进入和已存在细胞的离开.在细胞跟踪问题中,对于整个图像序列中细胞的数量及位置事先是未知的,所以在进行PSO搜索时需要考虑两部分,第一部分是搜索进入图像中的新细胞,这些新细胞中可能还包括了之前消失(离开图像)的细胞;第二部分是跟踪先前帧中存在的细胞,跟踪结果将以细胞的质心位置及近似尺寸表示.为此,图1提出了两种运行机制:探索机制和保留机制.
探索机制:如图1(b)所示,针对新细胞识别,在整幅图像中首先初始化一个群,粒子将通过公式(3)和(4)搜索,一旦粒子群搜索到一个细胞就会停留于该图像区域中,重复以上操作直到当前帧中的所有细胞都被搜索,需要注意的是一个细胞只对应一个群.
保留机制:如图1(c)所示,针对前几帧已经识别的细胞,粒子群对其具有认知能力.因此,如果该细胞在当前帧依然存在,那么群能够快速地识别出.此外,当粒子群跟踪已存在的细胞时,将根据细胞的显著程度从而遵循一种特定的顺序进行识别.
3.1.1探索机制



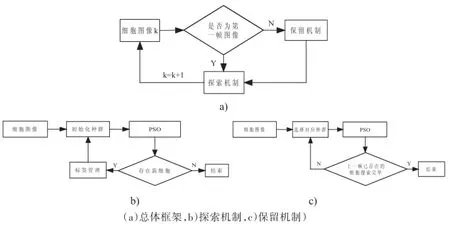
图1 基于PSO的多细胞跟踪方法搜索策略



其中γ和 ξ为调整系数,hi(l)表示颜色直方图向量hi第l部分的值,C表示在一个颜色直方图中所有部分的数目.fL(xi)介于0和1之间.如果两个直方图相似度越高,该值越接近1.
在此基础上,探索机制中的适应度函数定义为

3.1.2保留机制

其中,Σ是预定义的一个基于细胞速度及形变的一个对角矩阵.在第t帧时预测状态表示为

细胞Kt-1(k)的预测速度估计为

3.2基于检测模块的PSO多细胞跟踪

3响.参数r1,r2,r3是每一次迭代时在区间(0,1)中生成的随机数,设定c1=c2+c3=2,其中c3=0.5.
在保留机制中,需要定义细胞的显著程度Lt-1,为此,我们定义在空间邻近度和外观相似度的基础上计算出检测数据与目标当前状态之前的匹配程度

4 实验仿真与分析
4.1细胞图像数据与参数设置
为了验证算法性能,考虑在两组不同的细胞图像序列下进行实验仿真,两组细胞图像包含如下不确定因素:细胞动力学差异,细胞形变,细胞的进入与消失细胞等.参数的选择如表1所示.

图2 基于检测的PSO多细胞跟踪方法
4.2结果与讨论

表1 参数值设定和说明
图3和图4分别给出了图像序列1和2的多细胞跟踪结果,可以看出,针对多细胞不同的动力学特性,不同形状以及细胞的进入和消失,本文所提出的算法均能实现准确参数估计,如图像序列1中的部分进入的细胞(如细胞6进入第2帧中,细胞8进入第19帧中)和消失的细胞(如第13帧中的细胞2和4)均能识别;图像序列2中的细胞3的进入,细胞1与细胞2的近邻、动力学差异大等特殊情形.
4.3讨论

图3 无检测模块的PSO多细胞跟踪结果(序列1)
4.3.1性能指标
为了评价参数估计性能,引入评价指标有[5]:虚警率(FAR),漏检率(FNR),标签转换率(LSR),标签丢失率(LTR)、均方根误差(RMSE)、平均每帧运算时间.

图4 无检测模块的PSO多细胞跟踪结果(序列2)

4.3.2不同参数策略对参数估计性能的影响

表2 不同策略下的仿真结果(20次蒙特卡罗仿真)
4.3.3两种多细胞跟踪算法的性能比较
在策略1的基础上,将基于无检测模块和基于有检测模块的两种PSO方法应用于图像序列2并进行性能比较.如表3所示,基于检测模块的PSO方法在FAR、FNR、LSR等性能指标上都有显著改善,分别提高52%,58%和66%.但是每帧的耗时并未有明显变化.与无检测模块的多贝努利滤波器[6]相比,本文所提出的方法跟踪性能表现出明显的优越性.

表3 两种基于PSO多细胞跟踪方法的性能比较
图5给出了两坐标方向上的平均RMSE统计结果,可以看出,加入检测模块环节后,其平均RMSE明显小于未加入检测模块的PSO方法.
综上所述,加入检测模块后,参数估计精度有了明显提高,增加了算法的鲁棒性.应注意的是,虽然增加了检测环节,但每帧平均参数%计耗时没有增加,其主要原因是加入了检测环节,粒子群中的大部分粒子的寻优过程更加有针对性,提高了执行效率.

图5 两种方法下的RMSE性能比较
5 结论
针对低对照比条件下的微小多细胞图像序列,本文提出了一种新颖的基于粒子群优化的方法来实现多细胞参数估计.针对已存在细胞和新出现细胞,分别设计了两种不同的搜索机制,即探索机制与保留机制,在此基础上,提出了无检测模块和加入检测模块的PSO多细胞跟踪方法.实验结果表明:1)该方法能够准确估计每个细胞的位置;2)能精确捕捉到进入的新细胞和离开的细胞;3)当细胞之间发生交互时,依然能够准确参数估计.
[1]Meijering E,Dzyubachyk O.Tracking in cell and developmental biology[J].Seminars in Cell&Developmental Biology,2009,20(8): 894-902.
[2]Xu B L,Lu M L,Zhu P Y,et al.An accurate multi-cell parameter estimate algorithm with heuristically restrictive ant system[J].Sig⁃nal Processing,2014,101:104-120.
[3]Smal I,Draegestein K,Galjart N,et al.Particle Filtering for Multiple Object Tracking in Dynamic Fluorescence Microscopy Images Application to Microtubule Growth Analysis[J].Medical Imaging,2008,27(6):789-804.
[4]Juang R R,Levchenko A,Burlina P.Tracking cell motion using GM-PHD[C].Boston Proc:Biomedical Imaging:From Nano to Mac⁃ro,2009.ISBI'09.IEEE International Symposium on,Boston,MA:IEEE,2009:1154-1157.
[5]Rezatofighi S H,Gould S,Vo B N,et al.A multiple model probability hypothesis density tracker for time-lapse cell microscopy se⁃quences[J].Information Processing in Medical Imaging,2013,7917:110-122.
[6]Hoseinnezhad R,Vo B N,Vo B T,et al.Visual tracking of numerous targets via multi-Bernoulli filtering of image data[J].Pattern Recognition,2012,45(10):3625-3635.
[7]Kennedy J,Eberhart R.Particle swarm optimization[C].Proc.:Neural Networks,IEEE International Conference on,Perth,WA: IEEE,1995:1942-1948.
[8]Zhang X,Hu W,Qu W.Multiple object tracking via species-based PSO[J].Circuits and Systems for Video Technology,2010,20 (11):1590-1602.
[9]Thida M,Eng H L,Monekosso D N,et al.A particle swarm optimisation algorithm with interactive swarms for tracking multiple tar⁃gets[J].Applied Soft Computing,2013,13(6):3106-3117.
[10]Lu M,Xu B,Sheng A.Cell automatic tracking technique with particle filter[C].Tan Y,Shi Y,Ji Z.Proc.:Advances in swarm intel⁃ligence,LNCS.Berlin:Springer,2012:589-595.
A PSO-Based Algorithm for Multiple Cells State Estimation
CHEN Qing-lana,REN Ya-yunb,XU Ben-lianb
(a.School of Mechanical Engineering;b.School of Electrical and Automatic Engineering, Changshu Institute of Technology,Changshu 215500,China)
In terms of the difference in cell dynamics,the change in cell morphology,the varying population, and the spatially adjacent case of multiple cells,a particle swarm optimization(PSO)based approach is pro⁃posed to tackle the problem of multi-cell state estimation.For the existing and new entering cells,two types of searching mechanisms are defined,and a generic PSO-based method without the detection module is proposed to estimate the states of multiple cells.On the basis of it,the detection module is introduced,and an improved PSO based method is further investigated with the purpose of obtaining a relatively accurate estimate results. The experimental results show that this approach can automatically estimate the multi-cell states,and that the tracking performance is increased by 50%and less execution time is required after the introduction of detection module.Moreover,it shows better tracking robustness for those spatially adjacent cells.
multiple cell tracking;particle swarm optimization;state estimation
TP181
A
1008-2794(2015)02-0063-07
2014-07-16
国家自然科学基金项目“基于蚂蚁智能搜索行为的多细胞自动跟踪及其应用研究”(61273312)
通讯联系人:陈庆兰,工程师,研究方向:机电一体化,图像处理,目标跟踪,E-mail:chenql@cslg.cn.
猜你喜欢
昆明医科大学学报(2022年1期)2022-02-28
电子制作(2019年11期)2019-07-04
文苑(2018年21期)2018-11-09
电子制作(2018年16期)2018-09-26
浙江工业大学学报(2017年5期)2018-01-22
系统工程与电子技术(2016年7期)2016-08-21
火控雷达技术(2016年2期)2016-02-06
中国卫生(2015年9期)2015-11-10
中国卫生(2014年3期)2014-11-12