一种智能可穿戴的跌倒检测系统
2015-08-18 11:12周堂兴东华大学信息科学与技术学院上海20620东华大学数字化纺织服装技术教育部工程研究中心上海20620
网络安全与数据管理 2015年2期
周堂兴,范 红,2(.东华大学 信息科学与技术学院,上海 20620;2.东华大学 数字化纺织服装技术教育部工程研究中心,上海 20620)
一种智能可穿戴的跌倒检测系统
周堂兴1,范红1,2
(1.东华大学 信息科学与技术学院,上海 201620;2.东华大学数字化纺织服装技术教育部工程研究中心,上海 201620)
针对老年人意外跌倒的问题,设计了一种新型的可穿戴式跌倒检测系统。利用惯性测量单元(Inertial Measurement Unit,IMU)对人体的6个自由度(Directions of Free,DoF)参数进行测量,通过跌倒检测算法分析自由度数据,及时检测出跌倒,并将报警信息通过低功耗蓝牙 (Bluetooth Low Energy,BLE)发送到智能手机等终端。对不同的跌倒情况进行一系列的试验,测试结果表明,该系统可以有效地检测到意外跌倒事件并发出报警信息,达到预期目标。
意外跌倒;惯性测量单元;跌倒检测算法;低功耗蓝牙
0 引言
由于体质的下降和生理机能的衰退,老年人容易发生意外跌倒,意外跌倒发生后,如果不能及时获得救助,甚至可能危及生命安全。随着人口老龄化社会的到来,老年人的意外跌倒问题已成为十分重要的医疗和社会问题。跌倒检测系统的目标是能够准确并及时地检测到跌倒的发生,能够将其与日常活动(Activity in Daily Life,ADL)相区分,并在检测到跌倒时发出报警信号,从而保障老年人的安全和健康[1]。目前,针对跌倒的检测方法主要有3种:视频监测法、音频和振动检测法、可穿戴式装置检测法。基于三轴加速度传感器的跌倒检测系统成为目前国内外研究的主要方向,加速度阈值法是常用的跌倒判定方法[2]。可穿戴设备外形小巧,有着优良的电池寿命。另外,随着智能终端上BLE技术的普及,以智能终端为中心,以穿戴设备为应用外设,以 BLE为数据通信链路的可穿戴系统具有巨大的市场发展潜力。
1 系统设计
本文设计了一种基于BLE的跌倒检测系统,系统采用InvenSense公司的MPU-6050 IMU测量人活动时的三维加速度和三维角速度共6个DoF的数据。再根据这些数据并结合跌倒检测算法进行处理和分析,从而判定是否发生跌倒。最后,通过 Nordic公司的 nRF51822 BLE片上系统将检测到的报警信号传输到智能终端,实现跌倒的检测和报警信号的获取。
跌倒检测系统包括数据采集、跌倒检测算法和信息传输。其中,数据采集涉及 MPU-6050的工作配置以及MPU-6050与 nRF51822 BLE片上系统的 I2C数字通信接口的实现。跌倒检测算法涉及算法的原理与具体实现流程。信息传输涉及BLE与智能终端之间数据通信的实现。其中,nRF51822片上系统集成了 Cortex-M0内核和BLE模块。跌倒检测系统结构如图1所示。
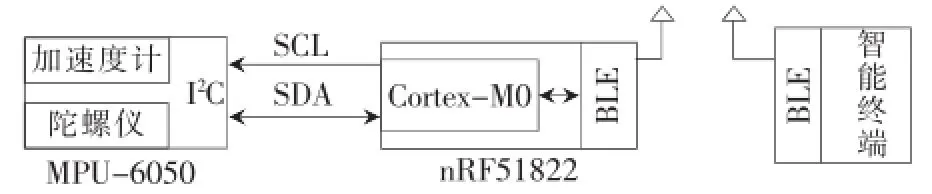
图1 跌倒检测系统结构
MPU-6050与 nRF51822可实现单板集成,外形小巧易于穿戴使用。穿戴位置可选择腰腹部位,尽可能减少日常活动对系统的影响。
1.1nRF51822 BLE片上系统
BLE继承了传统蓝牙技术在无线连接上的固有优势,同时增加了高速和低功耗的特性。BLE的核心是低功耗技术,契合了可穿戴设备的技术需求。
nRF51822 BLE片上系统集成了 32位的 Cortex-M0内核,256 KB Flash和 16 KB RAM,2.4 GHz射频模块,定时器/计数器以及模拟与数字外设等。其中射频模块支持 BLE。另外,Nordic公司提供了完整的 BLE协议栈解决方案,它集成了低功耗的控制器和主机,并提供了在片上系统 (System on Chip,SoC)上开发 BLE应用的完整且灵活的应用程序接口(Application Program Interface,API)[3]。用户只需定义和实现 BLE应用的通用接入规范(Generic Access Profile,GAP)层和通用属性规范(Generic Attribute Profile,GATT)层,并根据协议栈提供的应用接口实现短距离的BLE无线通信。
1.2MPU-6050 IMU
跌倒检测系统通过MPU-6050 IMU采集用户运动姿态数据,即三维加速度和三维角速度共6个DoF的数据,如图2所示。MPU-6050工作模式的配置以及用户DoF数据的获取均需要对其内部寄存器进行读或写操作,而上述的读或写操作均是nRF51822片上系统通过与MPU-6050之间的I2C数据通信接口实现的。
MPU-6050是 InvenSense公司推出的一款 6轴整合型运动处理芯片,其内部集成了一个三轴陀螺仪和一个三轴加速度计。MPU-6050对陀螺仪和加速度计分别采用了3个16位的ADC,将其测量的模拟量转化为可输出的数字量,传感器的测量范围都是用户可控的。MPU-6050与外部设备的通信通过 400 kHz的 I2C数字接口,另外它还包括一个可编程的中断系统,配合实现对MPU-6050内部寄存器数据的读取[4]。

图2 6个DoF
评估人体ADL的实验,总结出人体躯干部分的加速度分量一般不超过±6ɡ,而角速度分量一般不超过300°/s,选取1 kHz作为惯性传感器的采样输出频率,MPU-6050的加速度输出范围配置为±8ɡ,角速度输出范围配置为±500°/s。此外,配置 MPU-6050的中断系统,使得 6 个DoF的数据准备完成后在其中断引脚上产生中断信号,这时,nRF51822片上系统即可通过 I2C接口读取用户运动姿态数据。
2 跌倒检测算法设计
人体在发生意外跌倒时,三维方向的加速度值会发生突变,同时人体俯仰方向的角度也会发生较大的改变。而由于跌倒情况的差异性,人体发生前仰、后倒和侧翻时三维方向加速度变化的特点有较大差别。因而,通过对人体三维加速度和俯仰角速度数据提取特征量作为判决的依据,采用过程多阈值联合判决法设计跌倒检测算法,阈值的选取是根据人体在跌倒过程的不同阶段的加速度和俯仰角度变化的特征分别进行确定的。跌倒过程中的加速度和俯仰角度的变化有4个主要特征:(1)失重:在跌倒的开始均会发生一段时间的近失重现象,加速度值发生突变,同时人体俯仰角度迅速增大;(2)撞击:失重之后,人体与地面发生撞击,产生极大的冲击从而引起加速度反向剧变,这一阶段的人体也可能发生翻滚现象;(3)静止:通常撞击发生后会出现短暂的静止状态,表现为加速度和俯仰角度维持一段时间的相对平稳的过程;(4)结果:跌倒发生后,情况不严重时人可自行逐渐恢复站立,而一旦情况严重,比如导致人昏迷,人体将在很长的一段时间内保持静止状态,这是跌倒结果严重程度的判断依据[5]。
2.1提取特征量

其中,ω(t)为角速度值,Δφ为(0,t)内角度变化值。
人体从失重到撞击的过程时间极短,一般约为1 s,采用微元法,将1 s均分为 n个单位时隙,在单位时隙内角速度视为线性变化,在单位时隙内角度变化可近似为:

其中,φ(k)为k时刻的角度绝对值。
因而跌倒的过程中人体角度变化可近似为:
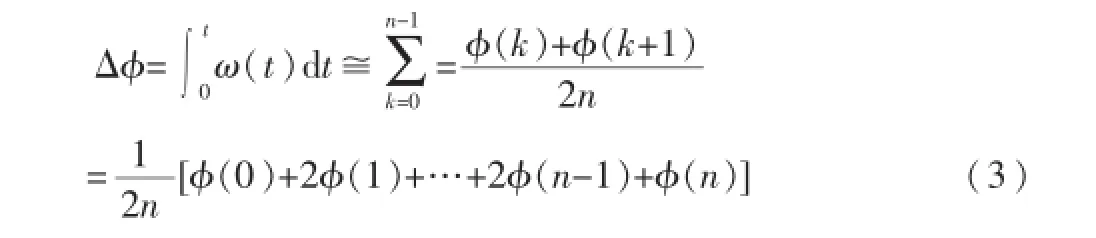
综合考虑运算量和计算精度,选取 n=50,以人体俯仰角度的变化量Δφ作为角度特征量。
2.2算法流程
根据跌倒过程的不同阶段加速度和角度特征量依次与设定的对应阈值进行判决,从而判断跌倒事件的发生以及跌倒结果的严重程度。具体的跌倒检测算法实现流程如图3所示。
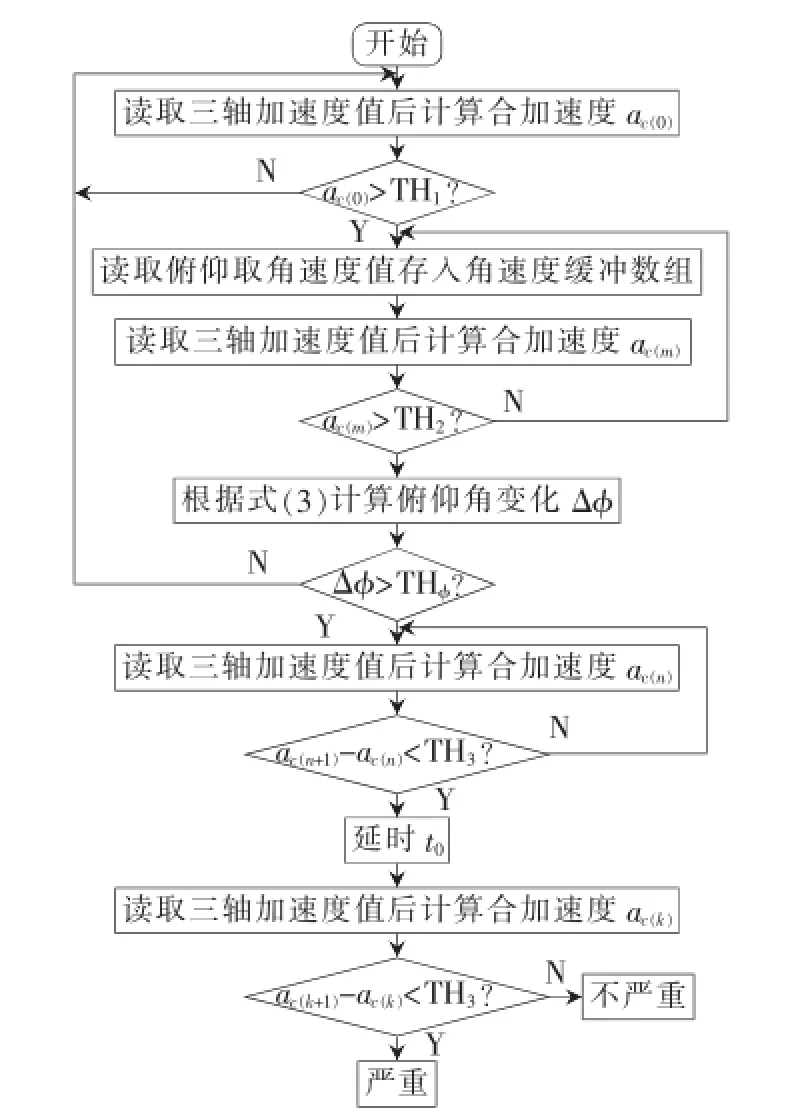
图3 跌倒检测算法流程图
根据相关实验测试,TH1、TH2、TH3、THφ、t0参考取值分别为 1.7ɡ、6ɡ、0.2ɡ、75°、10 s[6],其中 ɡ表示重力加速度常量。算法返回跌倒事件状态值 xi∈{x1,x2,x3},x1、x2、x3分别表示未发生跌倒、跌倒不严重和跌倒严重3个事件状态值。
3 算法实现与系统验证
跌倒检测算法判断跌倒事件的发生情况并返回对应的跌倒事件状态值来指示跌倒的严重程度。
3.1程序结构
跌倒检测算法和BLE通信应用程序均是基于Cortex-M0内核实现的。系统程序包括nRF51822上相关外设初始化、MPU-6050初始化及工作配置、初始化BLE相关参数,然后开始广播并等待事件中断,如按键事件、20 ms的用户数据读取定时事件和 2 s的跌倒事件状态值发送定时事件等。
3.2实测结果
系统软件在 Keil uVision4开发环境下编程实现,编译链接后下载到nRF51822上进行跌倒实验。跌倒实验包括前仰、后倒和侧翻,每组实验还包括跌倒严重和不严重的情况。正常情况、跌倒不严重和跌倒严重3种事件的状态值传输到终端的结果如图4的所示。
图 4中,0x0064表是正常状态值,0x0096表是跌倒不严重状态值,0x00C8表是跌倒严重状态值。
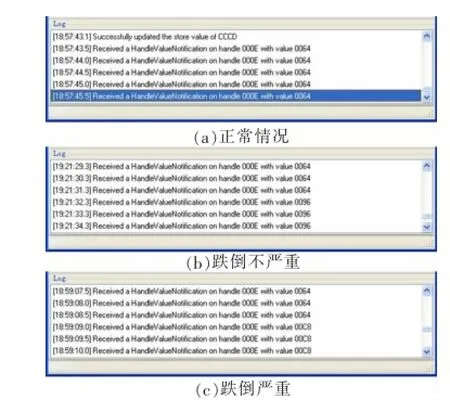
图4 3种事件终端显示结果
4 结论
通过对各种跌倒情况的实验测试结果可知,本文提出的跌倒检测算法能正确地识别不同的跌倒事件并能判断跌倒的严重程度。BLE具有高速和低功耗的特性,其在智能手机等移动终端上加速普及,而且最新的蓝牙4.1规范极大地强化了蓝牙技术在物联网领域的应用,因而BLE在可穿戴技术领域具有极大的发展潜力。
[1]ABBATE S,AVVENUTI M,CORSINI P,et al.Monitoring ofhumanmovementsforfalldetectionandactivities recognition in elderly care using wireless sensor network:a survey.WirelessSensorNetworks:Application-Centric Design,Yen Kheng Tan(Ed.),ISBN:978-953-307-321-7,InTech[EB/OL].(2010-12-14)[2013-11-12].http://www. intechopen.com/books/wireless-sensor-networks-applicationcentricdesign/monitoring-of-human-movements-for-falldetection-and-activities-recognition-in-elderly-care-using-wi.
[2]陈炜,佟丽娜,宋全军,等.基于惯性传感器件的跌倒检测系统设计木[J].传感器与微系统,2010,29(8):117-125.
[3]Creating Bluetooth low energy applications using nRF51822 nAN-36[EB/OL].(2013-10-11)[2013-11-15].https://www. nordicsemi.com/eng/nordic/download_resource/24020/3/56653730.
[4]MPU-6000 and MPU-6050 Product Specification Revision 3.4[EB/OL].(2013-08-19)[2013-11-25].http://www. invensense.com/mems/gyro/documents/PS-MPU-6000A-00v3. 4.pdf.
[5]NingJia.Detectinghumanfallswitha3-axisdigital accelerometer[J].Analog Dialogue,2009,43(7).
[6]赵祥欣.基于三维加速度传感器的跌倒监测研究[D].杭州:浙江大学,2008.
A smart and wearable falls detection system
Zhou Tangxing1,Fan Hong1,2
(1.College of Information Science and Technology,Donghua University,Shanghai 201620,China;2.Engineering Research Center of Digitized Textile&Fashion Technology,Ministry of Education,Donghua University,Shanghai 201620,China)
A novel wearable fall detection system is designed and implemented,which utilizes Inertial Measurement Unit to measure the parameters of six Directions of Free of people and analyze the data with the algorithm of detecting falls.Then it determines whether there occur unintentional falls or not.What′s more,the alarm signal will be generated and sent to the terminals like smart phone via the Bluetooth Low Energy.With the verification in a series of tests for different conditions of falls and the illustration of the results of these tests,the system is proved out to be able to detect the event of unintentional falls effectively and give out the alarm information.Thus,the expected goals are achieved.
unintentional falls;Inertial Measurement Unit(IMU);algorithm of falls detection;Bluetooth Low Energy(BLE)
TN92
A
1674-7720(2015)02-0094-03
(2014-08-29)
周堂兴(1989-),男,硕士研究生,主要研究方向:嵌入式系统。
范红(1976-),女,博士,副教授,主要研究方向:数字图像处理。
猜你喜欢
当代水产(2022年6期)2022-06-29
作文小学高年级(2022年3期)2022-04-20
成都信息工程大学学报(2021年1期)2021-07-22
汽车观察(2018年12期)2018-12-26
福建中学数学(2018年1期)2018-11-29
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
电子制作(2017年13期)2017-12-15
电子制作(2017年13期)2017-12-15
37°女人(2017年8期)2017-08-12