
成像声纳动态聚焦算法研究与FPGA实现※*
2015-08-15 06:28董琎琎周建江夏伟杰蒋鹏飞金雪
单片机与嵌入式系统应用 2015年4期
董琎琎,周建江,夏伟杰,蒋鹏飞,金雪
(南京航空航天大学电子信息工程学院,南京210016)
成像声纳动态聚焦算法研究与FPGA实现※*
董琎琎,周建江,夏伟杰,蒋鹏飞,金雪
(南京航空航天大学电子信息工程学院,南京210016)
针对多波束成像声纳实时获取水下目标精细二维声图像的要求,提出了一种可动态聚焦的波束形成算法及其FPGA实现。通过对波束通带、过渡带、阻带范围的动态调整,显控终端利用凸优化的方法实时计算出最优的加权系数并通过千兆网络下发至声纳湿端设备,在Xilinx公司的VIRTEX-6 VLX550T FPGA上实现可动态聚焦的波束形成算法,并将波束数据上传至干端PC进行成像显示。本文设计的方案在已有目标定位的基础上,实现了精细成像。
成像声纳;动态聚焦;凸优化;FPGA
引言
声纳成像在海洋资源开发和海洋防卫等方面有着重要的意义,具有作用距离远、图像直观显示观测区域状况和识别目标等特点。传统成像声纳多采用固定系数的波束形成技术[1-2],虽然运算复杂度小,但是在水底噪声环境比较差的情况下,成像性能会急剧下降。基于稳健性算法[3]的波束形成技术虽然能够在一定程度上容忍噪声的干扰,但是算法的复杂度往往比较高,而且会导致波束指向性能的下降。自适应波束形成[4]技术能够根据周围环境噪声场的变化,不断地自动调节本身的参数以适应周围环境,抑制干扰并检出有用信号。但是自适应算法多利用通道之间的相关性进行迭代运算,硬件复杂度很高且系统的实时性很难得到保证,在识别和分析目标的过程中不能对波束指向性函数进行动态调整,难以对目标的细节进行精细刻画。
为了满足在复杂海洋环境下对目标进行有效地定位、识别和分析,本文设计了动态聚焦波束形成方法。显控终端用户根据不同水况条件下环境噪声场的变化以及目标体积形状的特性,对波束指向性函数各参数进行实时调整,在干端主机上通过凸优化[5]的方法求解出适合当前应用要求的加权系数,通过千兆网络下发至声纳湿端设备,在Xilinx公司的VIRTEX-6 VLX550T FPGA上完成波束形成,并将波束数据上传至干端PC机进行实时显示[6]。
1 成像声纳系统总体设计
本文所设计的声纳系统由发射接收声基阵、信号调理模块、信号处理模块、数据传输模块、干端显示控制模块构成。以Xilinx公司的FPGA芯片作为核心器件,根据干端PC下发的控制指令实现对180个基元的发射接收电路的控制,完成数字波束形成,并将波束数据通过千兆网上传至干端PC进行显示。
设计达到的相关技术指标为:量程100 m,视角90°×20°,波束数538,角度分辨率1°,量程分辨率5 cm。
成像声纳工作流程图如图1所示,现有系统采用固定系数的波束形成,在实际测试过程中设置的主波束过窄会出现旁瓣较高、对目标搜索困难的情况,而主波束过宽又会使目标图像被展宽,导致系统的分辨率下降。本文主要研究显控模块和信号处理模块,显控模块主要完成系数的动态求解和下发,信号处理模块主要完成波束形成运算,两部分共同完成系统可动态聚焦波束形成的功能,以达到更佳的精细成像效果。
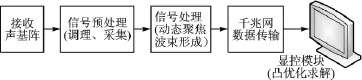
图1 成像声纳工作流程图
2 基于凸优化的动态聚焦
2.1 圆弧阵波束形成[7]
本文采用如图2所示的均匀半圆阵作为成像声纳系统的接收声基阵。其由180个相同的阵元1#、2#、...、180#构成,相邻两个阵元之间的角度间隔为Q=180°/179=1.0056°,波束间距为90°/537=0.167 6°。可以发现,相邻阵元之间的圆心角刚好是波束间距的6倍,采用基于圆弧阵的旋转多波束形成方法,通过阵元等效弦的转动,只需要6组加权系数矢量即可产生540个波束:1~91#阵元分别采用6组加权系数矢量产生1~6#波束,2~92#阵元采用相同的6组加权系数矢量产生7~12#波束,依此类推,最后90~180#阵元也采用相同的6组加权系数矢量产生535~540#波束(其中539#和540#波束在成像的90°范围之外,舍弃不用)。
为了不失一般性,这里仅对远场情形下的波束形成过程进行讨论,近场情况下只需根据实际的近场时延做出相应的修改。
圆弧阵列对应于波束预成方向θ的导向矢量可写成:
其中,R为圆弧半径,v为声速,w0是输入信号的角频率,φk为第k个阵元与波束预成方向的夹角。
得到该波束的空间指向性函数为:
H(θ)=wTg(θ)
其中,w为91维的实值加权系数矢量。
2.2 凸优化问题模型
凸优化设计方法[8]的主要思想是计算出满足设计条件的权值矢量w,使设计的波束响应H(θ)与期望响应D(θ)的差值最小,即满足期望的设计要求。
考虑|H(θ)-D(θ)|在各角度分量点上的和最小,设计其代价函数为:
J=‖wTg(θ)-D(θ)‖2
其中,权值矢量w定义在全体实数域上,求解代价函数J的最小值为典型的范数近似问题,在所定义的实数域凸集上一定有解。
为了实现可动态优化的波束形成,可将指向空间分为通带、过渡带和阻带,通过动态调整各空间带的范围来求解适合应用需求的波束形状。具体流程如图3所示。

图2 均匀半圆阵波束形成模型

图3 动态聚焦流程图
动态调整的过程主要是对图中虚线框中的通带、过渡带和阻带角度范围进行高度灵活设置,以满足期望响应的要求,对各部分的设置要求如下:
①通带塑形,对指定通带角度范围内的波束,通过求解代价函数的最小值,使主瓣形状与期望响应误差最小;
②过渡带变量松弛,设置合适的过渡带范围,防止在凸优化求解过程中出现过约束现象;
③阻带低旁瓣约束,设置期望的主旁瓣比值,作为凸优化的不等式约束。
2.3 仿真结果与分析
分辨率对于成像声纳系统至关重要,在设计波束空间响应的过程中,总是希望可以在得到更窄主瓣的同时旁瓣也可以非常低。但是在声纳孔径和阵元数受限的情况下,这两者是矛盾的,所以只能够根据不同应用条件来选择最适合的主旁瓣特性。
根据之前声纳项目的经验积累,采用余弦加权的方法,对余弦加权的期望响应函数进行了凸优化。结果显示,在不明显增加主瓣宽度的情况下,旁瓣得到了抑制,可以很好地解决小目标在成像过程中被展宽的问题,仿真结果略——编者注。
在不同Gp、Gs、Pd范围以及旁瓣约束条件下,可以对波束指向性函数进行动态调整,宽主瓣、超低旁瓣的波束响应可以应用在大范围搜寻目标的阶段,而窄主瓣的情况可以用在对已知目标进行精细成像的阶段,动态聚焦的过程就是对目标进行定位、识别和分析的渐进过程。动态聚焦的仿真结果略——编者注。
仿真结果显示,本文设计的方法可以很好地满足多个阶段对波束指向函数特性的不同需求。
3 FPGA实现[9]
本文采用全数字化设计的数字多波束形成技术在水下视野范围内产生密集多波束。数字多波束成像系统分为180路ADC同步采集模块、信号处理模块和控制模块。信号处理模块完成对180路数字回波信号的正交解调、FIR滤波抽取及多波束形成。
3.1 原理设计和FPGA选择
多波束成像系统的信号处理流程如图4所示。首先对回波声信号进行A/D转换得到数字信号,其次通过数字解调器获得采样数据的同相分量I和正交分量Q,接着通过降采样滤波器降低I、Q信号的数据率,以减小数字系统的工作频率(数据吞吐量)及存储资源需求,最后通过多波束形成运算输出波束数据用于声纳成像。因为需要在FPGA中存储大量的波束加权数据,并对180个通道的LVDS信号进行并行接收处理,所以芯片内部Block RAM和差分I/O的数量是选择芯片的一个重要因素。对工作速度和芯片本身的各种资源、成本等方面进行权衡,选择了Xilinx公司的VIRTEX-6 VLX550T FPGA来实现本系统[10]。

图4 多波束成像系统的信号处理流程
系统工作时,在显控终端上利用滚动条控件动态调整Gp、Gs、Pd的范围以及旁瓣约束,可以动态生成期望波束响应所需的权值矢量,通过以太网发送至信号处理模块,进行波束形成运算。控制模块产生波束形成过程中所需的读写地址信号和控制信号。控制信号部分主要产生运算部分和存储部分的运行使能,通过Moore状态机来实现,保证了数据的同步性,同时Gray编码的使用有效解决了亚稳态[11]现象。
3.2 权系数动态存储
显控终端处理后的权系数矢量采用乒乓操作实现系数的输入和输出,实部数据和虚部数据使用独立的双端口RAM存储。
波束形成过程中,6个多波束形成模块使用各自的系数RAM。由于滤波抽取后单通道信号速率为30 kHz,实时形成540波束的速率也为30 kHz。多波束形成模块采用90个波束、91个系数复用一个乘法器,为了实现实时信号处理,RAM读时钟需达到245.7 MHz(0.03×91×90),而系统的有源晶振为25 MHz,通过时钟管理模块(DCM)不易产生245.7 MHz的时钟,因此采用270 MHz作为多波束形成模块的处理时钟,将91个加权系数补0增加至100个加权系数。
由于采用时分复用乘法器的结构,9个全0数据的增加,除了会增加部分存储空间外,并不会增加对乘法器等其他资源的使用量,相反却简化了时钟控制。
波束加权系数wncos(Tn)与wnsin(Tn)分别存储在不同的系数RAM中,形成1个波束在4种不同声速情况下的实/虚部加权值,乒乓RAM的容量应为所需要缓冲数据的2倍,因此每个RAM深度为800。同时为了实现近场聚焦,需要存储8个聚焦面(包括近场的7个聚焦面和远场)的加权系数矢量,分别存储在不同的RAM中。
每个波束形成模块存储波束加权系数矢量实际所需存储空间总共为2×8×800×16 b=25 KB,整个系统所需存储空间为150 KB。
乒乓RAM的写地址和读地址都以400为周期计数,即权系数w[1,1],w[1,2],…,w[399,1]写入乒乓RAM的地址0~399;权系数w[1,2],w[2,2],…,w[399,2]写入乒乓RAM的地址400~799(原来地址基础上+400);再接下来权系数w[1,3],w[2,3],…,w[399,3]写入乒乓RAM的地址0~399,覆盖之前的权系数,以此类推。其中w[m,t](1 ≤m≤399,t≤1)表示时间轴上第t组权系数。
4 测试与总结
为了测试方法的有效性,在消声水池对声纳进行了测试,为了更好检测系统对于小目标的成像能力,选择了一个直径60 cm、厚度只有1 cm的圆环作为目标。基于此方法的消声水池测试结果略——编者注。
选择不同的空间指向响应,画面成像效果会产生动态变化,动态聚集前由于波束主瓣过宽,圆环图像的分辨率比较低,成像的颗粒感比较明显,在通过显控干端下发更窄主瓣的波束指向权系数给FPGA之后,圆环的画面精细程度明显提高,系统对该圆环目标的识别和分析能力明显增强,符合本文动态聚焦方法设计的初衷。
在学校泳池,对水下的潜水员进行了实时成像扫描,得到了清晰的潜水员运动画面。方法的实用性得到了进一步验证,测试结果略——编者注。
结语
本文给出了一种成像声纳动态聚焦功能的设计方法,基于凸优化理论实现了在波束形成过程中对波束空间指向函数特性的动态调整,并且基于Xilinx公司的Virtex-6 VLX550T FPGA完成了对该方法的工程实现。
实际的消声水池测试结果表明,该方法在对水下目标的探测、识别和分析过程中达到了很好的效果,但是在实际操作中还需要软件操作人员的工程经验和专业知识的支撑,在后续的工作中需要对系统动态聚焦功能的智能化做出进一步的探索。
编者注:本文为期刊缩略版,全文见本刊网站www. mesnet.com.cn。
[1]殷凤平,吴杰,周建江.基于FPGA的多通道高速声纳波束形成系统[J].数字技术与应用,2009(10):96-100.
[2]黄慧,汪飞,夏伟杰,等.成像声纳中多波束形成的FPGA工程实现[J].单片机与嵌入式系统应用,2014,14(3):29-32.
[3]张海滨.稳健的自适应波束形成算法研究[D].大连:大连理工大学,2010.
[4]Shan T J,Kailath T.Adaptive Beamforming for Coherent Signals and Interference[J].Acoustics,Speech and Signal Processing,1985,33(3):527-536.
[5]鄢社锋,侯朝焕,马晓川,等.基于凸优化的时域宽带旁瓣控制自适应波束形成[J].声学学报,2007,32(1):5-9.
[6]杨成,杨康,董琎琎,等.基于 FPGA多波束成像的声纳系统设计[J].单片机与嵌入式系统应用,2014,14(3):16-19.
[7]杨益新.声呐波束形成与波束域高分辨方位估计技术研究[D].西安:西北工业大学,2002.
[8]Boyd S,Vandenberghe L.Convex Optimization[M].Oxford:Cambridge University Press,2009.
[9]Zhou Z,Li T,Takahashi T,et al.Design of a Universal Space Vector PWM Controller Based on FPGA[C]//Applied Power E-lectronics Conference and Exposition,2004:1698-1702.
[10]徐祥,蒋哲,王威廉.基于FPGA的高速数据采集、缓存与处理系统[J].电子测量技术,2013(4):68-71.
[11]徐翼,郑建宏.异步时钟域的亚稳态问题和同步器[J].微计算机信息,2008(5).
周建江(教授)、夏伟杰(副教授),研究方向为雷达信号处理;董琎琎、蒋鹏飞、金雪(硕士研究生),研究方向为信息获取与处理。
Imaging Sonar Dynamic Focusing Algorithm and FPGA Realization※
Dong Jinjin,Zhou Jianjiang,Xia Weijie,Jiang Pengfei,Jin Xue
(College of Electronic and Information Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)
According to the requirement of meticulous real-time 2D sound images of underwater target in the imaging sonar,a method of dynamic focusing beam-forming algorithm and its FPGA realization are proposed in this article.Through the dynamic adjustment of pass band,transition zone and stop band range,the display and control terminal can calculate the optimal weighted coefficient used convex optimization method in real-time and distribute to the wet end via gigabit network.We accomplish dynamically focusing beam-forming algorithm in Xilinx company's VIRTEX-6 VLX550T FPGA and upload the beam data to the dry end PC to display.In this paper,the design realizes further detailed imaging based on target locating.
imaging sonar;dynamic focusing;convex optimization;FPGA
TP391
A
薛士然
2014-10-29)
省部级-江苏高校优势学科建设工程资助项目(苏政办发(2012));2014年江苏省产学研联合创新资金资助BY2014003-14;2014年度“江苏省研究生教育创新工程”项目资助。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
潍坊学院学报(2021年2期)2021-07-22
考试与评价·八年级版(2020年5期)2020-10-29
海军航空大学学报(2020年2期)2020-07-27
装备制造技术(2020年12期)2020-05-22
信号处理(2018年5期)2018-08-20
信号处理(2018年5期)2018-08-20
信号处理(2018年8期)2018-07-25
信号处理(2018年8期)2018-07-25
电子技术与软件工程(2017年12期)2017-07-05
